Новая система от Смаллтим - SwiftAI Next Generation - автопилот+телеметрия+ИМУ

а высота в целевых точках разная задавалась, или она так плохо отслеживается (разброс от 70м до 120м)?
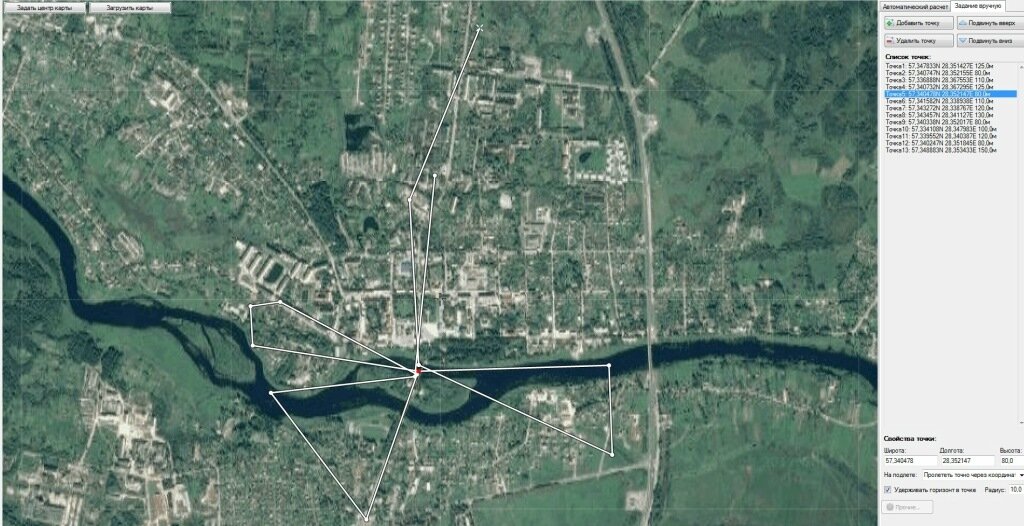
Исключительно точно отслеживалась. Таков план полёта. Скай выполнял фотосъёмку островка с мостами с разных ракурсов.
Чтобы объект съёмки оставался всё время в кадре, Скаю задано небольшое пикирование при фотосъёмки островка.
План полёта:
Маршрут полёта:
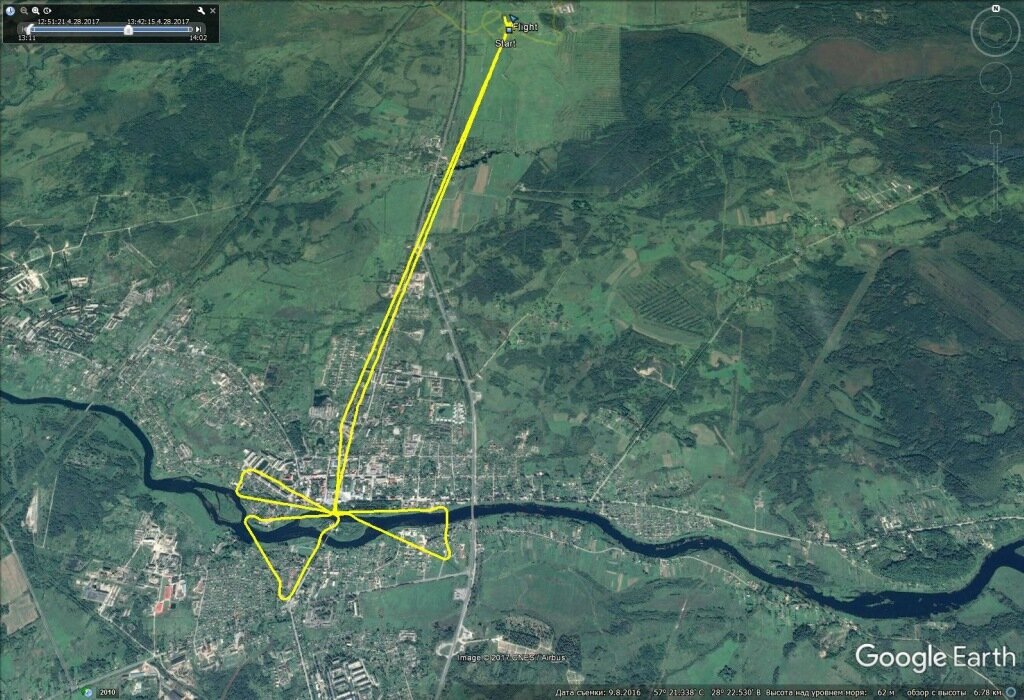
Учитывая частые сбои RC связи в районе фотосъёмки при малой высоте полёта на значительном удалении, полёт проходил полностью в режиме полёта по маршруту за исключением взлёта и посадки.
На предыдущем полёте у меня получился такой казус, который мне открыл положительно свойство АП (маршрут тот же самый).
Дело оказалось в том, что в пункте “при потере высоты на расстоянии” у меня было указано 80м и в плане полёта тоже фигурировала высота 80м.
Статус этого пункта оказался выше, чем план полёта. Я его уменьшил до 70м и всё,как вы видели, пошло нормально.

Можно сказать, что есть страховка при полёте по точкам. Если по какой либо причине АП продолжит снижение в режиме полёта по маршруту,
то при достижении 70м Скай уйдёт в набор высоты заданный в АП при автовозврате (у меня 150м). Затем опять начнёт “штурмовать” не пройденную точку.
Имейте ввиду, что при равенстве выше указанных высот снижения и если целевая высота будет недостаточной, чтобы “вынурнуть” из зоны пропажи RC, АП может зациклиться на не пройденной точке и
Скай будет кувыркаться по замкнутому циклу, пока не кончиться заряд батареи. В этом случае при отсутствии RC вы не сможете включить автовозврат или ручное управление.
Да, чуть не забыл сказать, У меня АП руководствуется баро высотой.
И ещё могу поделиться настойками Ская для прошивки 1.2.6
yadi.sk/d/pJHwWcMm3HWukA
Скай у меня такой:

Его начинку можно посмотреть здесь:
rcopen.com/blogs/104335/21734
после 12 точки автовозврат включился сам или вы его включили (там связь 100%)?
в режиме полёта по маршруту, после прохождения последней точки АП автоматически переходит к автовозврату.
Разбил MyTwinDream, прошивка последняя,
Вылет первый, самолет пошел вниз с левым креном, вот видео:
Вылет второй, как только включили стабилизацию, при чем не ожидая, получили морковку:( вот видео:
АП до этого стоял на крыле с этой же прошивкой, проблем не было, также выкладываю настройки, и лог. Но лог похоже не записался.
Я грешу на вибрацию, но на земле во всем диапазоне газа горизонт не плывет.
Я в прошлом сезоне тоже не смог подружить MTD с зеленым. Симптомы как у вас. На земле во всем диапазоне газа горизонт как прибитый. В воздухе при включении стабилизации начинает заваливаться по крену и тангажу. В лучшем случае летит ровно до первого управляющего воздействия а дальше та же песня. В этом сезоне решил откатиться на старую прошивку, с которой летал на Х8. Пока то времени нет то погоды. Может два мотора дают какую то хитрую вибрацию от которой АП впадает в ступор? Но тогда почему на земле это не проявляется? По ощущениям, на Х8 вибрации были сильнее, чем сейчас на твине, но летало хорошо.
А разработчики кажется забили на хобби версию окончательно(((((
Друзья, чё-то не знаю что и делать? Со старой прошивкой на MTD нормально летал. На новой в прошлом году получилось всего один раз и то как то не комфортно было из-за настроек. Сейчас ждал погоду и вот тебе раз - краш . Евгений, можно посмотреть Ваши настройки стабилизации?
Со старой прошивкой на MTD нормально летал.
Вроде самолет простой с классической схемой, просто интересно это что же за настройки таки должны быть ?
это что же за настройки таки должны быть ?
Ни чего особенного просто настройки чувствительности и демпфирования от старой прошивки не подходили к новой. А настроить новые показатели ещё не успел. Вот сейчас думаю а стоит ли испытывать судьбу и пробовать новую или откатиться назад и спокойно летать.
Летаю на прошивке v.1.2.6, КП v.6.4.2.
С точки зрения надёжности очень хороша, без глюков в плане лётных качеств.
На днях летал по маршруту из 13 точек в зону с неустойчивым RC сигналом.
отлично сработал, правда всё равно нервничал. Так что рекомендую эту прошивку к использованию.
Последняя прошивка мне не понравилась. На ней мне перекосило горизонт и Скай разбился.
Тимофей рекомендовал изменить настройки. Но с этими настройками на прошивке v.1.2.6
Скай летает великолепно.
Крайняя версия прошивки сырая. У многих были подобные краши или предпосылки. На ветке об этом писалось.
Тимофей плотно занимается доводкой версии про которая,по его словам, далеко ушла от хоббийной. Обещал внести наработанные изменения в нашу версию уже давно, но, видимо, у него нет на это времени. Связи с ним нет.
Геннадий спасибо за предупреждения! Наверное откачусь на предыдущую. Почему Вам не нравится swiftai ng v. 1.6.6. ?
Евгений, можно посмотреть Ваши настройки стабилизации?
Да, собственно, нечего там и смотреть. Нормально так и не полетел, вернее совсем не полетел, только в ручном режиме. Поищу дома, если чего осталось, выложу.
А у меня всё на последней прошивке настроено, жду погоды.
Виктор, удачи и ждём отчёта.
Если не трудно покажите как у вас расположен АП в MTD.
Николай, для автопилота делаю домик антивибрационный. Не знаю на сколько это помогает? Но всё равно делаю. 😁
Почему Вам не нравится swiftai ng v. 1.6.6. ?
У меня эта прошивка глючила при полёте по маршруту. Она иной раз включала автовозврат при пропадании RC связи в ходе полёта по маршруту несмотря на запрет включения АВД при выполнении полёта по маршруту.
По видео выше видно что это на 100% руль высоты самого автопилота в реверсе.
также выкладываю настройки, и лог. Но лог похоже не записался.
Последняя запись лога от 17.04.2017, а краш произошёл 06.05.2017
Я всё таки слетал в прошлую субботу, но времени не хватает пишу только сейчас.
После полугодового перерыва первый раз. Летал на последней версии, радует то что автопилот не уплывает и возврат домой работает, но как работает это не понятно. У меня с этими настройками осенью на старой версии уже не плохо летало. Пока изменил настройки, попробую ещё раз. Много аккумов сильно сдали в ёмкости. В передатчике в поле трёхпозиционный переключатель вдруг ни с того ни с сего стал двухпозиционным. Пришлось в поле перепрограммировать , а дома старый опять заработал как надо.
Короче вот видео “возврата домой” - (как г…о в проруби), и полёт по кругу - сойдёт.
Летал на последней версии, радует то что автопилот не уплывает и возврат домой работает, но как работает это не понятно.
Справедливости ради представлю вырезки из своего тестового полёта последней прошивки. Модель на тот момент подверглась модернизации, имела переднюю центровку и крен влево, поэтому вначале пришлось триммировать в полёте, компенсируя снижение. Не смотря на это набор высоты при первом включении RTH, выход на круг и руление вполне приличные. Далее, возврат домой по прямой и выход на круг, тоже без проблем.
Летал на последней версии, радует то что автопилот не уплывает и возврат домой работает, но как работает это не понятно.
Фактический горизонт земли и горизонт АП не синхронны. Может из-за этого большие переруливания.
Вчера опять полетал. Выставил максимальную чувствительность, думал будет огромное перерегулирование, что летать невозможно будет. Оказалось в самый раз. Но вчера самолёт вообще не хотел снижаться, кругом термики, причём сумашедшие. Я разложился, взлетел, проверил возврат, поставил в круг (всё это делал по монитору) и стал подключать очки, пока их подключал самолёт забрался уже на 600м, я даже труханул, во думаю, сейчас управление пропадёт и прощай. Перевёл вручную и быстренько спикировал. Ещё писалка вчера глюканула - в 15 минутном файле идёт запись, потом пошли сильные помехи (пара секунд), и дальше идёт видео через 1 час 10 минут.
Но кое что можно нарезать, позже выложу.