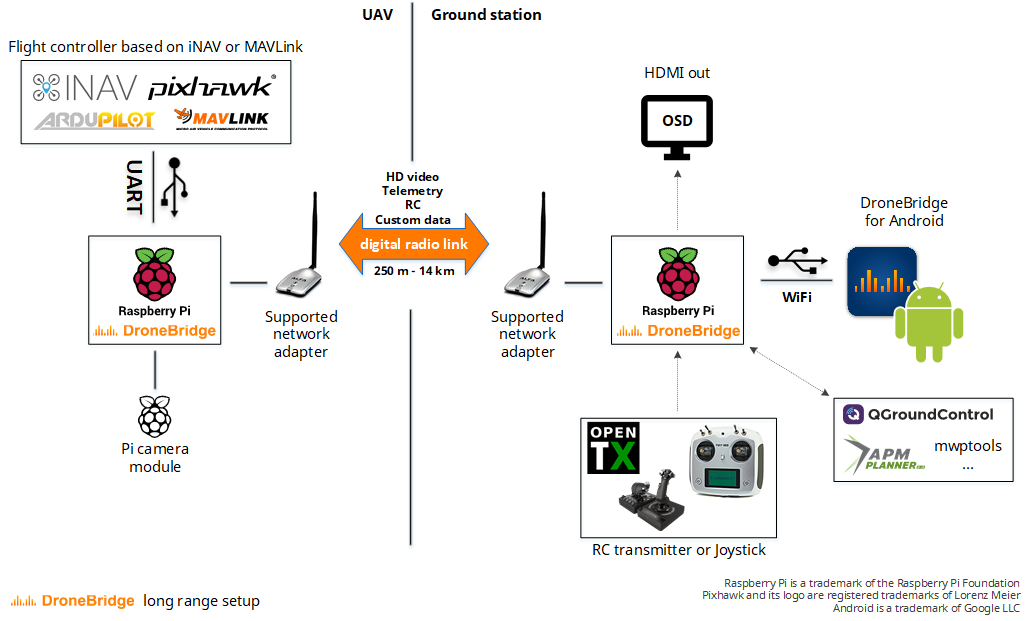
DroneBridge: HD-видео линк с широкими возможностями.

Тут зарождение.
Проект (возможно) БЕСПЛАТНЫЙ!
Особое СПАСИБО товарищу dv_mkp за наводку)
Из описания:
*Проект базируется на EZWFBC
*Android-приложение отображает видео-поток с картой как на фантомах/мавиках от DJI
*поддержка iNav,Ardipilot,Pixhawk с возможностью конфигурирования
*горячие настройки линка (с android без конфигурирования txt)
…


Т.е это просто более удобная прога, но ничего нового в плане новых камер, задержки сигнала нет.
Т.е это просто более удобная прога, но ничего нового в плане новых камер, задержки сигнала нет.
Эта прога у меня заработала только с данным образом для малины.
видео-поток с картой как на фантомах/мавиках от DJI
если с такими же чудовищными тормозами, как у DJI то сгодится только для больших медленных аппаратов
если с такими же чудовищными тормозами, как у DJI то сгодится только для больших медленных аппаратов
Не обязательно для больших и медленных, просто не для фристайла и гонок. Когда я летишь на высоте 1000м и нихрена не видишь в аналоговую широкоугольную камеру - бесит ужасно.
Залил предварительно стоковые образы EZWFBC 1.6RC6 (стоковые настройки)…после залил DroneBridge Beta v0.5,сразу пошли лаги связи по сравнению с EZWFBC 1.6RC6 (настройки не сравнивал),телефон поток по USB на приложение сразу схавал.
Не применяются изменения настроек из приложения android.
Железо-борт: zeroPi<>TP-link 722n
Железо-наземка: Pi2B<>TP-link 722n
Не совсем понятно,для каких задач используется ESP32 -
“Replace your EZ-GUI with the DroneBridge app to monitor your flights. Integrate it into your own projects. Connect Wifi SOCs like ESP32 to your phone and get rid of the Raspberry Pis. All the key protocols and interfaces are open and documented. Make it yours!”
я могу предположить,что производительности ESP32 хватит на прием и обработку-передачу телеметрии на телефон…или еще и видео поток она толкает?
Источник тут внизу страницы.
***
Нашел позже картинку
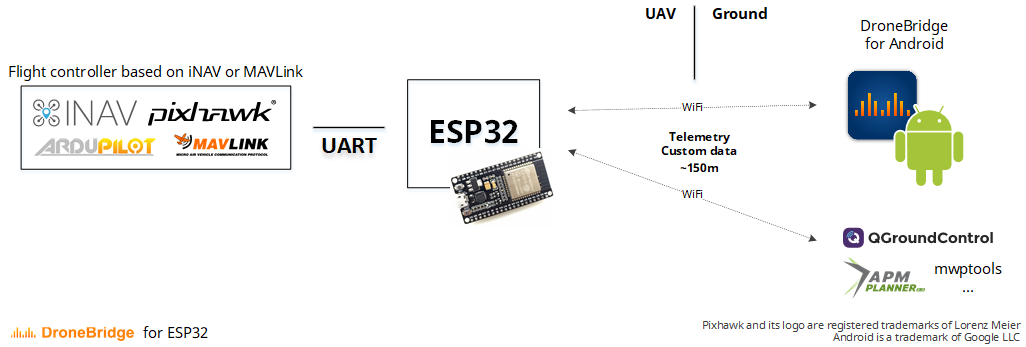
видимо,только для передачи телеметрии…
Не обязательно для больших и медленных, просто не для фристайла и гонок. Когда я летишь на высоте 1000м и нихрена не видишь в аналоговую широкоугольную камеру - бесит ужасно.
на высоте 1000м, фризы, лаги и пропажи видео, именно простой аналог с хорошей антеной выручает.
Я не знаю, кого там что выручает, пишу свой опыт. Делал съемку полей подсолнечника фермеру, поля раскиданы хаотично среди пшеничных и не засеянных, так вот с огромным трудом ориентировался с 1000м, где какое поле, практически вслепую с аналоговой камерой. И это огромные поля, что говорить о задачах с более мелкими объектами.
Фризы и лаги могут быть как приемлемыми, так и несовместимыми с нормальным полетом, все зависит от реализации и радиообстановки.
Залил предварительно стоковые образы EZWFBC 1.6RC6 (стоковые настройки)…после залил DroneBridge Beta v0.5,сразу пошли лаги связи по сравнению с EZWFBC 1.6RC6 (настройки не сравнивал),телефон поток по USB на приложение сразу схавал.
Не применяются изменения настроек из приложения android.Железо-борт: zeroPi<>TP-link 722n
Железо-наземка: Pi2B<>TP-link 722n
Какие у вас WiFi-модули?Автор сетует на особенности настроек:
"Unfortunately, if you fly with atheros ar9271 chipset…
у меня воздух малина зеро+тп линк 722 v1
земля малина 3B+ralink 3070 и еще пробовал ar9271 с али. драгонлинк 5
но по совету с соседней ветке по телеметрии так ничего и не пошло, костыль с ОСД и с телеметрией на борту 433 мГц так же не сработал. Поставил образы на EZBroadCast rc6 и костыль с ОСД заработал! Без осд не идут данные. Буду писать автору… конфиг файлы все проверил и пробовал разные значения но на Бридже так и не заработало(((
Не совсем понятно,для каких задач используется ESP32 -
“Replace your EZ-GUI with the DroneBridge app to monitor your flights. Integrate it into your own projects. Connect Wifi SOCs like ESP32 to your phone and get rid of the Raspberry Pis. All the key protocols and interfaces are open and documented. Make it yours!”
я могу предположить,что производительности ESP32 хватит на прием и обработку-передачу телеметрии на телефон…или еще и видео поток она толкает?
Источник тут внизу страницы.
***
скорее просто для управления и телеметрии на смартфон. Ведь таким образом можно исключить Аппу и приемник в воздухе.
на высоте 1000м, фризы, лаги и пропажи видео, именно простой аналог с хорошей антеной выручает.
Ну так же можно сделать и хорошую антенну на 2.4!
Согласен что еще все сыро… но мы тут что бы вместе добиваться хорошего и устойчивого изображения… 😉
А вот аналог как ни крути по качеству очень плохо.
Залил предварительно стоковые образы EZWFBC 1.6RC6 (стоковые настройки)…после залил DroneBridge Beta v0.5,сразу пошли лаги связи по сравнению с EZWFBC 1.6RC6 (настройки не сравнивал),телефон поток по USB на приложение сразу схавал.
Не применяются изменения настроек из приложения android.Железо-борт: zeroPi<>TP-link 722n
Железо-наземка: Pi2B<>TP-link 722n
Настройки применяются только по USB кабелю… по вифи пока нет.
Так же Бридже наблюдал более сильные лаги по сравнению с RC6. Пилим дальше… 😉
Hello Friends,
I’m from the US so I don’t know how is translations going to work out but, here we go…
I feel like I’ve tried to sign up for this forum 4 months no but there was always some problem with registration and I couldn’t post comments.
Recently you have been discussing Dronebridge. I tried this out most of last month and it has great potential. I posted several videos, I’m attaching a couple here…
Unfortunately, if you fly with atheros ar9271 chipsets, there are inherent problems that you’ll encounter. Various data rate and FEC settings that worked with 1.6 RC 6 did not work with dronebridge. Also, the video would periodically drop out.
If you’re having trouble getting OSD and Telemetry to work, Wolfgang, the creator of dronebridge has the image download ready fol LTM inav type flight controllers.
It took me two days to realize that I had to go into the OSDconfig.txt and change LTM to Mavlink.
Thank you for the project! Everything is very clear and pleasant to manage the drone! 😉 But your image did not want to pass through this data of telemetry from a pixhack cuav. I tried different parameters and even connected a parallel OSD card. I can send files with settings.
Кому удалось завести телеметрию с Айнава на DroneBridge? На WBC она работает без проблем как на мониторе компа так и в FPV-VR. Но хотелось бы использовать DroneBridge. На одноименном приложении работает только видео.
Не пробовал,но думаю проблем не должно возникнуть,т.к. (только) для телеметрийных данных,в ПК активизируется один из протоколов (например Mavlink)…
Штатно,стандартные образы WFBC принимают на свои UART-порты скорость 57600,её необходимо задать в свойствах Ports (iNav) на том порту,который будет взаимодействовать с бортовой малиной (с указанием протокола Mavlink).
Собственно,соединить линии ПК с малиной крест на крест (для отображения телеметрии,достаточно одной линии ПК:tx>Pi:rx).
!Если используется бортовая ZeroPi,то необходим логический конвертер,т.к. ПК на UARTе выдает 5в,а ZeroPi работает с 3,3в.
Возможно,в android-приложении проверить тип протокола (mavlink)…
Не пробовал,но думаю проблем не должно возникнуть,т.к. (только) для телеметрийных данных,в ПК активизируется один из протоколов (например Mavlink)…
Штатно,стандартные образы WFBC принимают на свои UART-порты скорость 57600,её необходимо задать в свойствах Ports (iNav) на том порту,который будет взаимодействовать с бортовой малиной (с указанием протокола Mavlink).
Собственно,соединить линии ПК с малиной крест на крест (для отображения телеметрии,достаточно одной линии ПК:tx>Pi:rx).
!Если используется бортовая ZeroPi,то необходим логический конвертер,т.к. ПК на UARTе выдает 5в,а ZeroPi работает с 3,3в.
Возможно,в android-приложении проверить тип протокола (mavlink)…
Это все понятно. Повторю что в wbc всё работает, следовательно со стороны полетника все настроенной верно. Видимо нужно что то править в конфигурации прошивки малины… Неужели никто не сталкивался? Не знаю как остальные полетник но Matek F404ctr выдает 3.3в на юарт.
Пока забросил данный проект. Прелопатил все настройки в конфигах… и автор не отвечает почему не идет даже через “костыль” с OSD телеметрия с пикса… поставил оригинальный wbc. Буду ждать решения может в сл прошивках что то поменяется.