Контроллер для кордовых электричек

Есть еще очень большое отличие вертолетов от самолетов,
у кордовых самолетов не бывает резких скачков нагрузки, в отличии от вертушки.
А значит не будет резких перепадов оборотов мотора, время покажет ).
С уважением.
Я думаю, для оценки гувернера, надо сначало подать на регулятор, сигнал шим равный 2500 оборотам, с отключеннным гувернером, выставив его потенциометром по тахометру. Посмотреть на сколько стабильно сам регулятор держит эти обороты.
Потом включить функцию гувернера, и задать эти 2500 оборотов на ардуино, и сравнить показания тахометров, с гувернером и без.
Просто на последнем видео, мне показалось, что уж больно сильно плавают обороты по тахометру, или просто сам такой тахометр… Или ардуинка не успевает регулировать обороты… Или регулятор не успеаает отрабатывать эту корректировку.
у кордовых самолетов не бывает резких скачков нагрузки, в отличии от вертушки
Как раз таки и бывает, основная нагрузка при прохождении углов на квадратных и триугольных фигурах. Разворот происходит практически на месте, как на вертолете.
Это на радио самолетах, на фигуру есть пол неба, а на кордах максимум полусфера, ограниченная длинной тросов.
Одно время, даже ставили винты от квадриков, пока не научились делать нужные пропеллеры)
И кстати, чтобы квадрик четко висели не плавал, для этого применяют более быстрые регуляторы, или прошивают самолетные, которые успевают отрабатывать все корректировки полетного контроллера.
Просто на последнем видео, мне показалось, что уж больно сильно плавают обороты по тахометру, или просто сам такой тахометр… Или ардуинка не успевает регулировать обороты… Или регулятор не успеаает отрабатывать эту корректировку.
проверил программу, выпал кусок кода в процессе крайней правки,
сейчас задержка реакции Ардуинки на изменение оборотов - один оборот мотора.
а будет 1/7 оборота, для этого конкретного
мотора.
сигнал шим равный 2500 оборотам
ШИМ ничего не знает про обороты мотора.
сейчас в ардуино прописано, что она должна обеспечить вращение мотора на оборотах 2500,
она с этим справляется )).
Опять же оптический тахометр есть устройство со своей точностью, вряд ли она выше 5 %.
А значит погрешность одного тахометра - 2500*5% = 125 оборотов
Ардуина значительно точнее измеряет обороты мотора.
значит погрешность одного тахометра - 2500*5% = 125 оборотов
На видео были просадки до 2100 оборотов по тахометру, что явно выпадает за пределы его погрешности. Поэтому и обратил на это внимание.
На видео были просадки до 2100 оборотов по тахометру
нет такого ), в начале тахометр съехал вниз, а конце первой половины видео мотор уже начал останавливаться
что бы исключить лишние болтания тахометра, поставил его на штатив и снял новое видео.
результат как говорится "на лице"©
разгоняется достаточно медленно, так в программе сейчас настроено, будет в семь раз быстрее
причем чем выше обороты, тем быстрее будет реакция )
у меня небольшая пауза затянулась,
мне немного разбили машину, сейчас занят вопросом ее восстановления.
Я пока жду регулятор с али, где то затерялся по дороге. Зима длинная, и пока погода не летная…
пока решаю вопросы c ремонтом автомобиля,
никакие “программирования и трассировки” в голову не лезут,
но … “нашел в себе сил”(шутка естессно) и заказал вот такую платку
Супер мини макетная плата ESP32 с Wi-Fi и Bluetooth
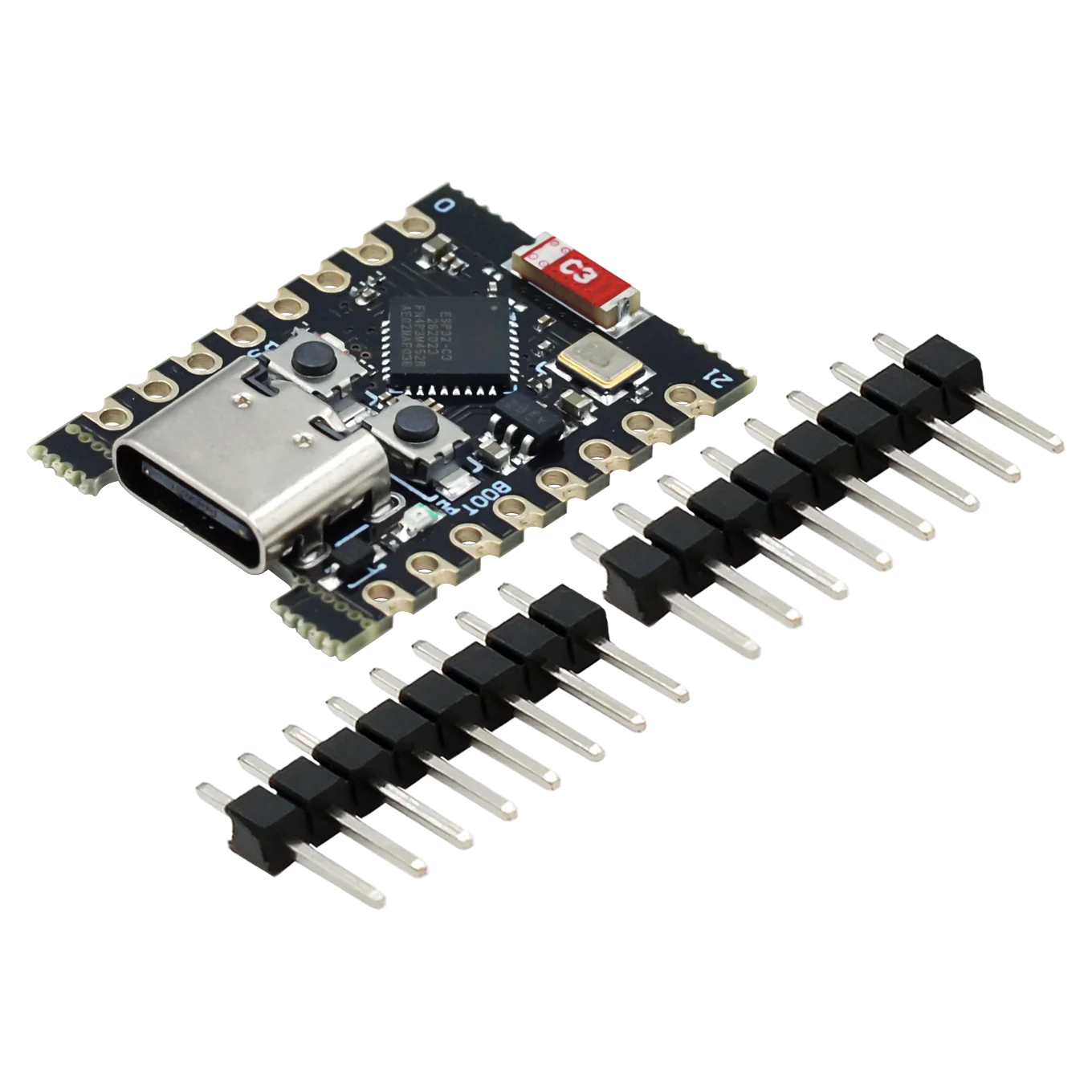
все удовольствие 190 рублей, на 20 рублей дороже чем Arduino Pro Mini, но …
дьявол, как известно, кроется в деталях,
у этой платы есть WiFi и BT, а значит реально реализовать управление через WEB интерфейс
но это пока только проекты )
Читал я тесты про esp32, пишут что она намного слабее чем ардуино и аналоги, что то там со скоростью вычислений связано, в “простонародье тупит”))
хрень пишут )), у Меги 328 16МГц тактовая частота, т.е. 16 млн простых операций в секунду,
а у ESP32 40МГц в два с половиной раза больше.
в таймере нет большого количества вычислений, а один цикл больше 2 мс, т.е. больше 32000 тактов,
до хрена времени )
FLASH память, то куда программа записывается 4МБ супротив 32КБ у 328,
с энергонезависимой памятью примерна та же байда,
безусловно какое то количество ресурсов будет отбирать WiFi, но не так много и только при работе
За что купил, за то и продаю, тест был не с про мини, а с аналогами от ардуино и им подобным. Отсюда у него и цена как у про мини, а сравнивали его с какими то чипами с похожими характеристиками.
Ардуинки в основной массе на Atmega328p, есть на Atmega2560,
но там тоже не далеко ушли теже 16МГц и чуть больше (256КБ) Флэш память,
но при этом куча портов выведенных на гребенку
я бы с удовольствием все сделал на STM32, там и среда разработки сильно лояльная
и возможности даже у младших процессоров на порядок выше,
но плат разработки маленького размера типа Про Мини на STM32 нет
а платка ESP32 из поста выше, размерами гораздо меньше, а возможностей в разы больше
дело в том, что портов I/O на таймере много не надо,
- I - кнопка
- I - прерывание от частотомера
- O - порт управления регулятором
- O - светодиод
- i2c - для подключения гироскопа (опционально)
Предложенная плата, это аналог climb and dive таймера.
А вообще, все удачные зарубежные таймеры сделаны на pic-контроллерах, и их ресурсов достаточно и для гувернера и для акселерометра с гироскопом, но надо рисовать и паять плату.
Почему то таймеры на базе макетных плат по типу ардуино,особого распространения не получили. Толи не смогли заставить работать правильно, толи боятся экспериментов)))
Что касается wifi, то многие телефоны хреново работают в режиме точка точка, да и многим пользователям вбить статику на телефоне, целая проблема… Поэтому надо поднимать точку доступа на платке, нагружать dhcp сервер, чтобы телефон подключался к контроллеру, плюс туда загружаем веб интерфейс. Круто, но сколько всего надо запихать в таймер. А еще надо как то телефону объяснить, что если нет интернета на этой точке доступа, то не надо от нее отключаться и переключатся на 4g.
У блютус, надо программку для андройда написать, через готовые терминалы, не совсем удобно настраивать ,надо подсказку с собой таскать, так сделан kordtimer, который продают в фасршопе.
У меня наконец то приехал регулятор, можно приступать к экспериментам на ардуинке. Сейчас на работе разгребу, перепаяю все провода , отрежу лишнее, и можно тестировать.
Поэтому надо поднимать точку доступа на платке, нагружать dhcp сервер, чтобы телефон подключался к контроллеру, плюс туда загружаем веб интерфейс. Круто, но сколько всего надо запихать в таймер. А еще надо как то телефону объяснить, что если нет интернета на этой точке доступа, то не надо от нее отключаться и переключатся на 4g.
все придумано до нас
есть готовый
jeecrypt / JeeUIFramework
Это веб интерфейс, про подключение через вайфай, к модулю как к точке доступа ни слова.
Проблема автоматического переключения между 4г и вайфай, при отсутствии интернета, так же остается.
И это не проблема модуля, так сделаны телефоны.
Я на это напоролся, когда на модуле esp8266, собирал проект для rgb - конвертера. Такая же проблема наблюдается при использовании диагностики автомобиля obd2, через вайфай, мобила отключается от модуля и ломится в инет через 4г.
Единственным выходом было, глушить любой интернет на телефоне, на время настроек, что очень не удобно, ни чего не посмотреть в интернете, пока не закончишь настройки, а потом главное не забыть включить инет обратно))
я с таким до сих пор не сталкивался, спорить не стану.
да и тут толком пока не разбирался, пока не до того.
на днях повешу машину на подъемник, вот тогда успокоюсь.
ЕМНИП в данном случае все работает как в китайских квадрах и вертолетиках с камерой.
смартфон подключается к открытой сети и в окне браузера открывается страничка.
Для внука в свое время делал управление катером через RemoteXY,
судя по всему тут работает примерно так же )
А кстати, использовать RemoteXY (remotexy.com/ru/editor/) тоже как вариант.
Поддержку ESP32 в среду они прикрутили, у меня на ESP8266 катер метров на 20 от берега бегал )
Кста, в RemoteXY добавлен функционал подключения ардуинок к смартфону по USB OTG.
На днях посмотрю, что это такое.