Activity
Подскажите пожалуйста, в аппе на 40мгц если ее выключаешь, на на канале приемника сразу появляются мусорные неконтролируемые команды. Если квадр улетит за зону устойчивого приема аппы - в приемнике будет аналогично. Вопрос - это со всеми аппами так или только с устаревшими и все современные 2.4ггц не имеют такой болезни. то есть аппу выключил - на входе приемника тишина, а не расколбас
И второй вопрос - недавно советовали на алиэкспрессе недорогую аппу для начинающих, не могу найти ссылку. Может кто знает?
Здравствуйте. Подскажите пожалуйста. На 450 раме установлены ноги в виде клыка

Появилась необходимость прикрутить какие нить ноги, что бы подвесить gopro или фотик. Но не очень понятно какие ноги нужно покупать, чтобы они встали по размеру и в нужные дырки. Просьба подсказать
Взлетел мой квадрик. Переделал виброразвязку. Но правда в сторону его сносит. Как лечить?
winged, думаю Вы правы
Вибрации сильные? Пропы баллансировали? Моторы баллансировали? У меня CC3D схоже с ума сходил из-за вибраций, сначала вроде взлетал а потом резонанс из-за вибраций, мозги с ума сходят и привет земля.
Я к сожалению не очень понимаю как оценить вибрации. Вроде нет. Пропы отбалансированы, моторы кривые и не отбалансированные, но тут то именно что то газу добавляет сильно
Всем доброго дня. Пару страниц назад я выкладывал видео(пост #7707) моего бедолаги на multwii который постоянно переворачивается при взлете.
Сегодня в офисе я попробовал его поднять вверх рукой и держать параллельно земле(по возможности), заармился и начал чуть чуть добавлять газку. И вот кажется нарисовалась причина падения - через секунду две после легкого добавления газа у меня идет очень сильный рывок газа по кросс осям. Откуда это берется и как побороть?
Подскажите, а бывают механические подвесы без электроники для стабилизации gopro и аналогов? Или только электроника может выдать нормальное качество стабилизации?
Магнитометр пока не трогайте, а вот вибрации мне кажется, просто жуткие.
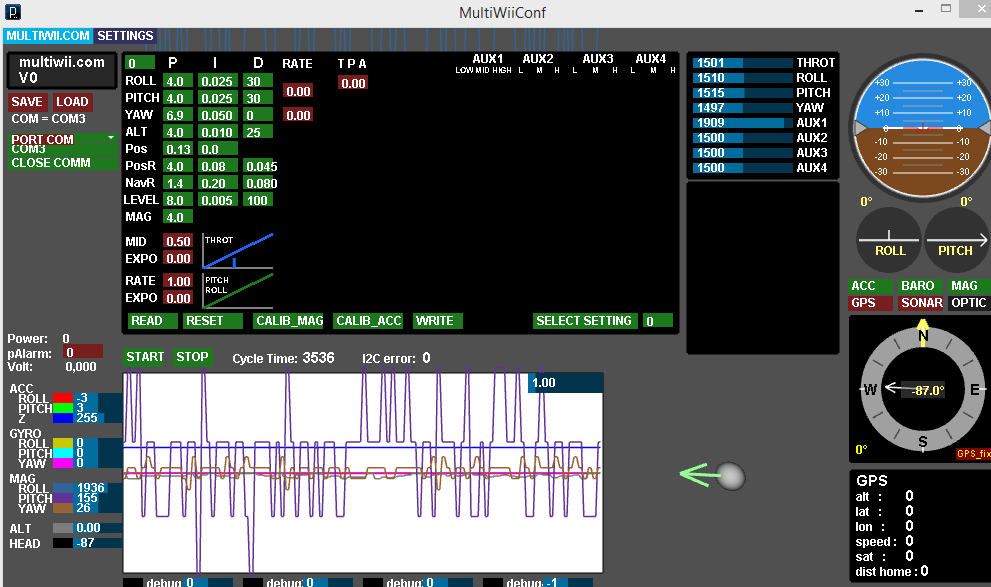
А где смотреть вибрацию и каие значения считать нормальными?
Попробовал я квадрик поставить на пол, прижать его сверху шваброй и добавлять газу. До 50% не дошел, так как он швабру выбивал из рук. Пришлось убавлять, а потом еще прибавлять газу. Магнитометр калибровал, но он всераво скачет. Это может быть причиной моих проблем? или это было бы просто рысканье? Сколько допустимо рысканье? Я калибровал как в примерах с ютуба - крутил в трех плоскостях 30 секунд. делал в помещении. Посмотрите пожалуйста видео. Не взлетит, можно даже не пытаться?
Сделайте тоже самое, только в двух вариантах. 1 - поставьте пропы, придерживайте на земле, заармите и постепенно прибавляйте газ примерно до середины. Это оценить влияние вибраций на аксель и гиро. 2 - без арминга понаклоняйте коптер по разным осям и посмотрите на “приборы”. Будут наклоны соответствовать показаниям приборов. С компасом для начала можно повременить.
Наклоняется в нужную сторону, тут все верно. Вопрос по прижатию к земле- то есть не давать ему взлететь и записать показания датчиков?
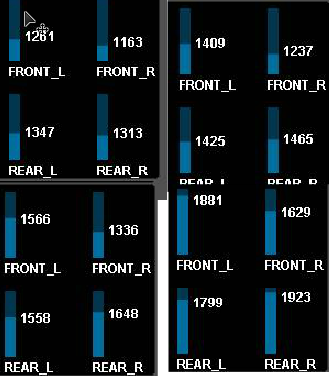
Пропеллеры отбалансировал, поставил средние рекомендованные в статье пиды, сделал виброразвязку мозга. Перед завтрашним стартом посмотрите пожалуйста мое GUI, когда коптер стоит на ровной поверхности. может что то в глаза бросится, датчики не правильно показывают или еще что. Спасибо
Все правы - пиды не настраивал - поставил нули как советуют для новичков. Прошивка MW 2.3. Но с махови аналогично падаем. Винты не отбалансированы, виброразвязки нет
пока из гуру ни кто не ответил, влезу со своими 5ю копейками 😃 с вибрацией/виброизоляцией всё в порядке? прост когда симу х5 переделывал в палколёт, при жёсткой фиксации мозга к раме, коптер делал примерно то же самое, правда мог взлететь чуть повыше. после установки мозга через поролон управление восстанавливалось
У меня приемник и мозг жестко закреплены в ABS корпусе антенны ШАЙБА-1 АТМ, к раме закреплено хомутами жесткими. Неужели виброразвязка настолько критична?

Друзья, все, я уже не знаю где искать причину невозможности взлета коптера на 450 раме с мозгом multiwii. Все откалибровано - все крены в gui видны, скорость вращения моторов примерно одинаковая, но он переворачивается. Взлетает резко вверх без первоначального падения, только если стиком газа больше середины газануть. Тогда он взлетает метров на 10-15 и потом падает 😦
Где искать причину? Все винты вращаются в правильную сторону, лопасти установлены правильно. Моторы подключены по мануалу.
Каждый запуск - минус от одного до трех винтов. Вот сегодняшние запуски - левый стик легонько добавляли. Два раза он начинает смещаться куда то от меня, а в третьем просто перевернулся. Менять мозг? но ведь на MW летают прекрасно люди…
www.youtube.com/watch?v=yz8wY_sBNZk
Подскажите по контроллеру multiwii - можно ли как то с момента арминга куда то писать показания всех датчиков и скорости двигателей, что бы понять почему он падает 😃
Отбой по вопросу - открыл через анонимайзер. Почему то в крыму сайт не открывается.
Всем привет. Извиняюсь что лезу в тему, но может тут кто то есть из Керчи? Нужна помощь с квадриком, пока я тут отдыхаю
Подскажите пожалуйста, перестал грузится мультивишный сайт, чтобы скачать прошивку (точнее мне нужен конфигуратор под mac os). Есть какие то альтернативные ресурсы кроме multiwii.googlecode.com
Срочный вопрос! Правильно ли я понимаю, что если направление двигателя по часовой стрелке - то ставим пропеллеры прямые, а если против часовой крутится, то обратного?



Подскажите пожалуйста мне по разнице моторов - калибровка решит эту проблему или нет
Подскажите пожалуйста, у коптера довольно сильно разница в оборотах мотора. Чем это лечится и какие расхождения допустимы?
Подскажите где искать причину - если у коптера с газом на минимуме выключить пульт управления, то он начинает сходить с ума - раскручить пропеллеры. Видимо на приемник приходит глюк. Что то экранировать надо?
Подскажите пожалуйста. Есть подозрение то аппа микширует каналы. Сейчас у меня при увеличении PITCH уменьшается ROLL и наоборот. Точно так не должно быть?
Подскажите, а существует последовательность подключения моторов к плате у правления? или в какую сторону вертется мы уже на самих моторах путем переключения проводов настраиваем?
Поиском не нашел. Вообще кто то делает самодельный подвес, со стабилизацией или это слишком сложно и гораздо проще купить хотя бы китайский?
Вообщем знающие люди подсказали, что квадрик у меня не взлетит из за аппы. Купил в барахолке простенькую вертолетную, а вертолетные вроде как подмешивают каналы между собой. Возник вопрос - как мне купить что то простенькое совсем для начинающего и при этом не налететь опять? Аппы чисто квадриковские имеют какие то особые обозначения?
И еще вопрос - можно ли пульт заменить планшетом? Есть такие комплекты приемник-приложение? Или в планшетах такие слабые передатчики, что такого быть не может?
У регуля три красных провода которые идут к мотору и с обратной стороны еще три. белый, красный и черный. Белый и черный подключаются к мозгам. А красный с 5в(проверял) запитывает плату. Как то по другому может быть? По крайней мере я так подключил, винты попискивают, плата запитана. Или по другому надо, а как у меня летать не будет?Вижу еще под термой провод с разъемом. Он для чего? до него просто так не добраться
Подскажите пожалуйста, правильно ли я понимаю схематику подключения электроники в коптере:
идем от моторов. Приходим в регули. Регули все между собой соединяются ± и далее на силовой разъем акб. Затем с одного и моторов берем средний красный провод. Там 5в и подключаем его в любую точку плюса мозгов. Например в один из свободных моторных. Приемник питается уже от платы. Я все правильно расписал?
Подскажите пожалуйста, не могу заставить коптер вращать винтами на multiwii. Может ли он не армится из за того, что у меня значение auх так сильно отличается от 1500? У меня вообще канал aux1 не подключен, а откуда то такое большое значение
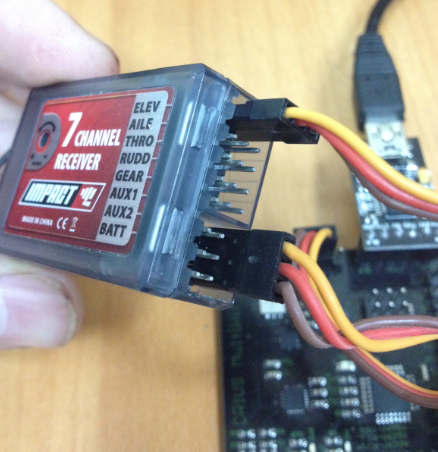
Подскажите пожалуйста, как надо подключать сигнальные провода с контроллера к приемнику? Там не подписано куда подключать. Три ряда пинов под каждым каналом.
Подскажите пожалуйста, а как закрепить мозг crius multiwii на этой раме? По отверстиям под винты не подходит.

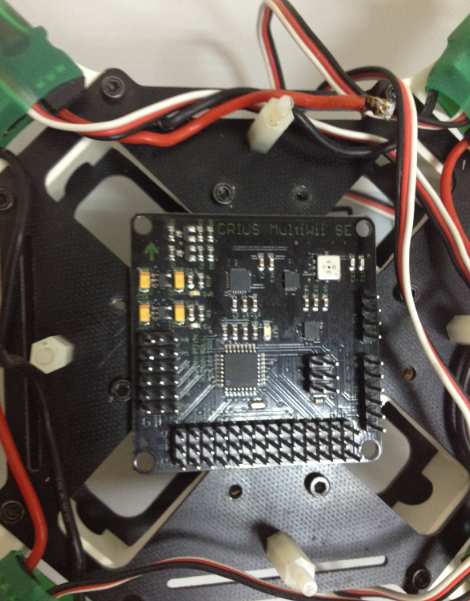
Еще вопрос - где можно найти пошаговую инструкцию по подключению этого модуля ко всем компонентам и настройка.
Друзья, подскажите пожалуйста, вопрос по первой версии маяка на si4432 и attiny13. Собрал еще один, все хорошо работает. Появилась необходимость поменять частоту. Есть исходники, но я никогда не компилировал код для контроллеров. Есть avr studio. Где можно найти инструкцию как правильно открыть проект в программе и скомпилировать hex. с моими изменениями ?
Пробовал в atmel studio - вылезает ошибка
Error 1 tiny13.h: No such file or directory C:\Users\Роман\Documents\Atmel Studio\GccApplication2\GccApplication2\GccApplication2.c 23 20 GccApplication2
Друзья, подскажите пожалуйста, вопрос по первой версии маяка на si4432 и attiny13. Собрал еще один, все хорошо работает. Появилась необходимость поменять частоту. Есть исходники, но я никогда не компилировал код для контроллеров. Есть avr studio. Где можно найти инструкцию как правильно открыть проект в программе и скомпилировать hex. с моими изменениями ?
Подскажите пожалуйста, как si4432 подключить к ардуино, чтобы пищать на определенной частоте?
Согласен. Кроить плохо.
А перестройка квадракоптера игрушечного размера с gps на старшую платформу с заменой двигателей регулей еще более глупая затея?
Всем привет, хорошего дня и успешных полетов.
Прошу совета, так как никогда не летал и коптером не обладал.
Хочу собрать коптер на своей раме примерно 450 размера. Но хочу обойтись без пульта управления, чтобы коптер имел контроллер, в который я мог бы зашить программу.
Например: после подачи питания - взлетаем и зависаем на 2 минуты на высоте 10 метров, делаем круг вокруг своей оси и приземляемся. Это я как просто вариант. Я понимаю все сложности, что ему нужно и стабилизироваться и точку свою первоначальную определять. Все весьма не просто.
Как лучше поступить - курить тему про arducopter или есть еще какие то варианты для проработки?
Еще хотел бы спросить по запчастям - где то читал, что на aliexpress можно заказать регулятор сразу объединяющий в себе четыре. Есть такое?
Какие самые дешевые моторы можно было бы заказать для для прототипа к
этому регулятору? Характеристики пока не сильно интересуют.