Activity






Существует известная проблема с IMU2 у ПК Pixhawk, проявляющаяся в ошибке Bad accel health. Подробно описана здесь. Самым простым способом решения является напаять резистор сопротивлением 220 Ом сверху на конденсатор на линии питания IMU2. Для Pixhawk 2.4.6 есть картинка с указанием этого конденсатора. Для чуда китайского гения под именем Pixhawk 2.4.8 такой картинки не нашёл. Прозвонил сам. Теперь делюсь.
Оба ПК куплены со всем известной редиски с разницей приблизительно в 1,5 года.


Из отличий 2.4.8, бросающихся в глаза:
- другая разводка
- отсутствует крепёж платы к нижней части корпуса
- отсутствует
батарейкаионистор - пластик корпуса как будто более худшего качества. Две из четырёх резьб сорвались после пары вкручиваний без особого усилия.
Вот, собственно, наши конденсаторы. Все три в параллель. Паять можно на любой, какой на вас смотрит (предварительно заклеив барометр куском, к примеру, изоленты).


К слову сказать, на 2.4.6 использованы конденсаторы такого типа, что пришлось сначала отпаять конденсатор, припаять резистор на плату, и сверху на него вернуть конденсатор.
А вот обе платы после покрытия лаком.

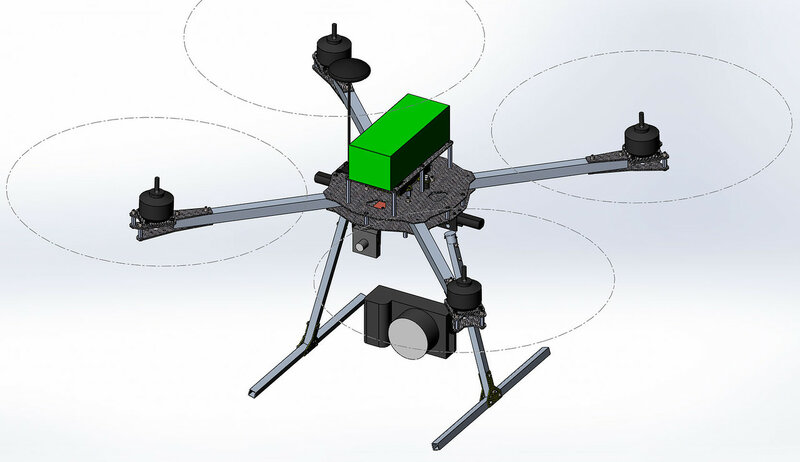
Вдоволь натренировавшись в SolidWorks, осуществил давнюю задумку - разработал складную раму квадрика под 16 винты.
Почему “Ослик”? Да потому что суслик, паукан. That’s why. На правах автора.😁
Размер по моторам 680мм.
16" винт (давно валяются моторы SunnySky X4112 400kv).
Ретракты Tarot TL65.
ПК Pixhawk.
Муляж камеры - Sony A6000 с объективом 16мм.
Чертежи пока не выкладываю. Это не окончательный вариант, и “в металле” пока не существует.


Анимация:
Моторамы с выкосом. На данных картинках 1,5 градуса.
Ранее мои моторамы уже подверглись критике, но лично мне схема нравится. Если есть идеи, как по-другому сделать мотораму с выкосом из простейших материалов - прошу в комментарии.



Начинаю свой дневник.
На досуге начал осваивать SolidWorks. В качестве тренировки начертил свою уже летавшую разработку. Первоначально чертежи были разработаны в Компасе. Некоторые детали были импортированы из Компаса. Некоторые созданы в Солиде с нуля. Моторамы и шасси перепроектировал, и на представленных чертежах оно отличается от летавшего экземпляра.
Представлены два варианта: с “обычным” шасси и со складным механизмом Tarot TL65 (смотрите в архиве).
Идеи для разработки бесстыже подсмотрены на данном форуме.






Анимация складной конструкции:
А вот, собственно, реально летавший экземпляр. К сожалению, это лучшие фото из всех, что есть.



Немного о летавшем экземпляре:
Моторы Multistar 4225 390kv
Винты APC 14x5.5MR
ESC ZTW Spider 20A
Полётник Pixhawk 2.4.7
Крепление батареи рассчитано на 6S 5000-10000mAh
Материал дек и площадки батареи - карбон 1,5 мм с aliexpress (самый дешёвый).
Материал деталей шасси и площадки полётника - текстолит 1,5 мм из местного магазина.
Материал лучей - алюминиевая труба 15x15x1мм из Леруа-Мерлен.
Моторамы перекочевали с давно убитой китайской рамы (текстолит 2,0 мм).
Рама складная. Лучи складываются как у гекс Tarot. Есть отверстие для фиксации в сложенном положении.
Полётный вес в представленном на фото виде (с батареей Zippy Compact 5000mAh 6S) 3800 г.
Пустая рама никогда не взвешивалась.
Скачать чертежи (SolidWorks 2017)
Так же в архиве имеются картинки разных видов на случай, если у вас нет SW2017.