Activity
Это где там у нас за Морозово такие просторы скошенные ? Думал там в травище всё…
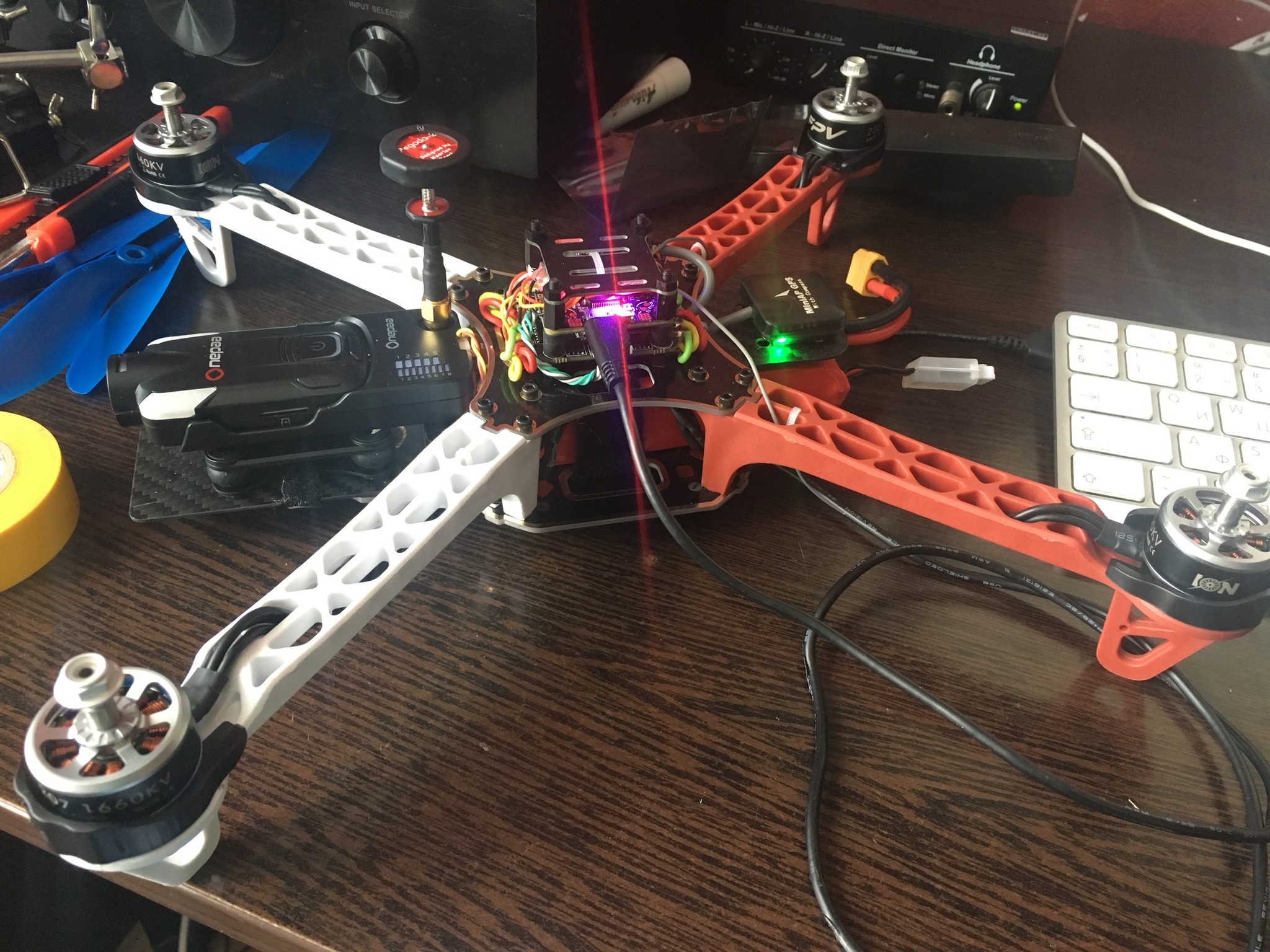
Да и вообще бы про дрон бы изложить бы… 😃 Видео классное. Живое очень. Когда камера на подвесе в режиме съемки (как правило подвес можно переводить либо в режим съемки, либо в режим FPV), видео получается более качественное, стабильное, но какое-то мертвое. Его долго смотреть не интересно. А здесь можно сколько угодно залипать. Ощущение полёта очень здорово передается, но, при этом, ни желе ни вибраций. В общем, описание сетапа в студию !
Отстроил вчера Дрона до, практически, идеального состояния. В предппоследний выезд, после этого видеороилика уже, начались чудеса с падением. Пару раз грохнулся с 50-ти метров ни с того ни с сего вместе с камерой. Благо, кругом трава высокая. Не покалечился. А причиной всему банальное мое разгильдяйство и невнимательность.
Про вибрации… Крепил к раме пластмаску для фиксации модулей и болтом уперся в контроллер (т.е., по сути, контроллер остался без демпфера). Но, главная беда, вчера сама вылезла наружу. При подключении к компу, ни с того ни с сего начал отваливаться УСБ, а потом и светодиод на платке УСБ-модуля начал жить своей жизнью. Сразу подозрения пошли на проводку и контакты. Начал осматривать провода и разъемы и вот оно… Как раз, после первого полета в “полной экипировке” (то, что на видео) мне пришел небольшой мониторчик I2C ну и я его решил примерить на дрон. Сунул в разъем платы разветвится, а он, зараза, не лезет… У Pixhack разъёмы не такие, как у Pixhawk. Ну и фиг с ним, подумал, потом поковыряю. А эта зараза, оказывается, загнула контакты в гнезде. Чуть тряхнешь дрон, они слипнуться, чуть тряхнешь - разлипнуться В общем, разогнул контакты, болт убрал. Слетал 5 аккумов на радостях и все в сове удовольствие. ПИДы настроил (точнее говоря - почти настроил) автотюном. Правда, так и не понял, сколько этой функции надо времени, что бы выполнить полную настройку. 20 минут висел и дрыгался. У меня аккум сдох. Пришлось садить дрона. Поднял, запустил и… так понял, что автотюн начал всё сначала. Но, как понял, он сохраняет промежуточный результат. И с ним претензий к поведению нет.
Но, вот опять же, про невнимательность. Приехал домой, сунул сд-карту с камеры в комп и на тебе… Желе на видео. Я чуть чаем не подавился. Как ? Трехосевой подвес на демпферах и желе… Оказывается я, когда навешивал подвес (тестировать начинал в этот раз без подвеса и ног, что бы не переломать всё это), сдвинул его в плотную к кольцам крепления трубок, на которых висит подвес. В результате зажал демпферы подвеса намертво. Как с этим расп…вом бороться, непонятно 😃
P.S. а потом удивляемся, чего Протоны падают 😃 Та же фигня похоже…
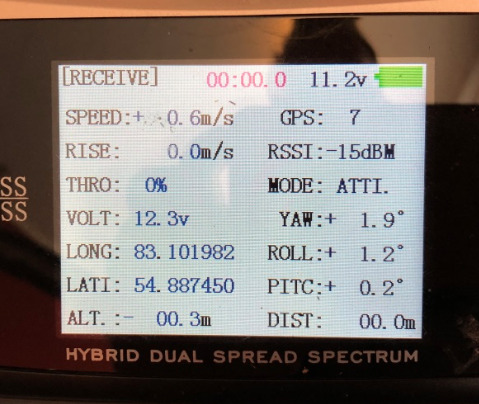
Нет. Читать координаты из лога мне совершенно без надобности. Они на пульте нужны и в реальном времени. Это уже пару раз спасло мои дроны от потери. Первый случай был еще с Хабсаном, а второй уже с моей сборкой. В обоих случаях картина примерно одинаковая… Дрон шлепнулся в лесу в 500-х метрах от меня. Видео из травы уже не передается. Т.е. на мониторе я не вижу ничего, а вот телеметрия на пульт продолжает поступать. Быстро сфотал координаты и по навигашке нашел и первый и второй дрон. Так же был случай, когда видео пропало, а расстояние до меня я видел на пульте. Покрутил его, практически в слепую и понял в каком направлении он ко мне летит. Удалось вернуть. Видеопередатчик на дроне накрылся, как оказалось потом. RTH был еще не настроен. Теперь все сборки делаю только с полной телеметрией на пульте. Как минимум: батарея, координаты, высота, расстояние до меня.
Нифига не пойму… Т.е. на дальности до 13 км видео передается ? Я с этого передатчика более 1 км выдавить никак не могу. Или приемник какой-то хитрый нужен ?
Дальнолёты, для съемок, однозначно рулят ! Я этим летом на Алтае с Фантома 3 стандарт снимал. Катастрофически дальности полёта не хватало. Прям вот смотришь пейзаж и еще бы хотя бы полкилометра пролететь для завершения картинки, но увы “летим домой”.
Рекомендую глянуть на 19-й минуте. К маралам удалось залететь 😃
А такой вопрос по Назе… С неё как вообще телеметрию на пульт можно отправить ? Что бы пульт какие-то звуки издавал при низком заряде батарей, координаты показывал. Это возможно ?
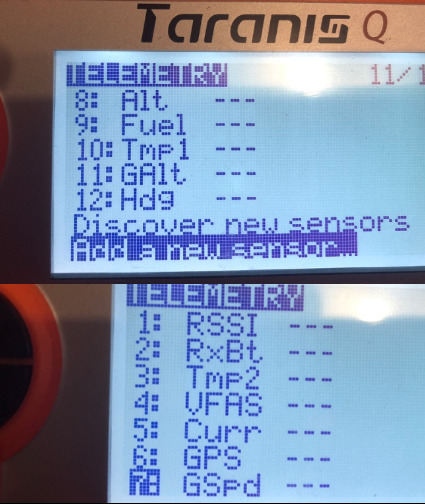
Это сенсоры которые у меня обнаружились (ну или те, которые потенциально работать могут - не знаю, какой там алгоритм).
По дальности не могу сказать. Я на этом дроне еще не летал на такие расстояния, что бы телеметрия или управление отвалились. 250-300 метров только. Дрон еще в процессе отладки 😃
Не знаю, мониторчики имхо не наш метод, мы летаем по шлемам - перенос намного больше и какчественнее. 😉
Наза летает-то хорошо (хотя долголёт что-то трясёт, но это от какого-то дисбаланса), но вот почти ничего не умеет. И просит только собственные комплектующие - компас, GPS, OSD и прочая. Очень сокращает возможности колхозинга. 😉
Что-то пока не могу подружиться со шлемом или очками. Шлем как-то неудачно купил (Ичайн простенький. Там настройки под зрение нет. Взял очки Скайзоны… Там моя переносица упирается не туда куда надо (видно нос как-то не верно сконфигурирован). До гоночных дронов пока не дошел (хотя мысли уже есть). В основном так… полетать, поглазеть или поснимать. Полетать поглазеть - монитор само то. Поснимать то же. Еще люблю развлекаться с дроном в пределах прямой видимости. Забавное зрелище 😃 В общем, молодой я еще дроновод. Больше процесс сборки и отладки нравится, чем эксплуатация. 😃 Мне еще у Назы сама комплектация не очень понравилась. Всё с какими-то громоздкими разъёмами, толстенные жгуты проводов… И сделано всё аккуратно - стричь жалко. В этом плане Matek хорош. Всё на пайке всё очень компактно получается. Один недостаток - летает как корова на льду. Но это уже не к Матеку, а к Айнаву вопросы.
Думаю там много отчего зависит. И от контролера, и от подключенных сенсоров и от самого модуля телеметрии 😃 На других контроллерах я такую связку не настраивал. Есть Pixhawk mini и пара Matek F405CTR. Но там коптеры с пультом Radiolink AT9S используются. И там всё проще. Подцепил модуль PRM-03 между контроллером приемником r9ds и сразу всё на аппаратуре вместе с оповещением. Настраивать ничего вообще не нужно. И, честно говоря, то как это выглядит на Radiolink, мне нравится больше. Каналов только маловато получается. В общем, к Таранису у меня пока какое-то противоречивое отношение 😃
На 800 метров тут в ролике улетел, далее видео начало прерываться. Но я с этим дроном за дальностью и не буду гоняться. Не охото обвешивать антеннами и т.д. Пусть такой будет. Потом, может быть, если безделица замучает, попробую воткнуть клеверок под корпус, в носовой части. Там специально столько места оставлено свободного. Лучше потом мониторчик с двумя антеннами закажу с диверсити функцией. У меня Наза так и пылится в коробочке с зимы. Что-то руки так и не дошли её воткнуть куда-нибудь. Как она летает ? Говорят очень стабильно.
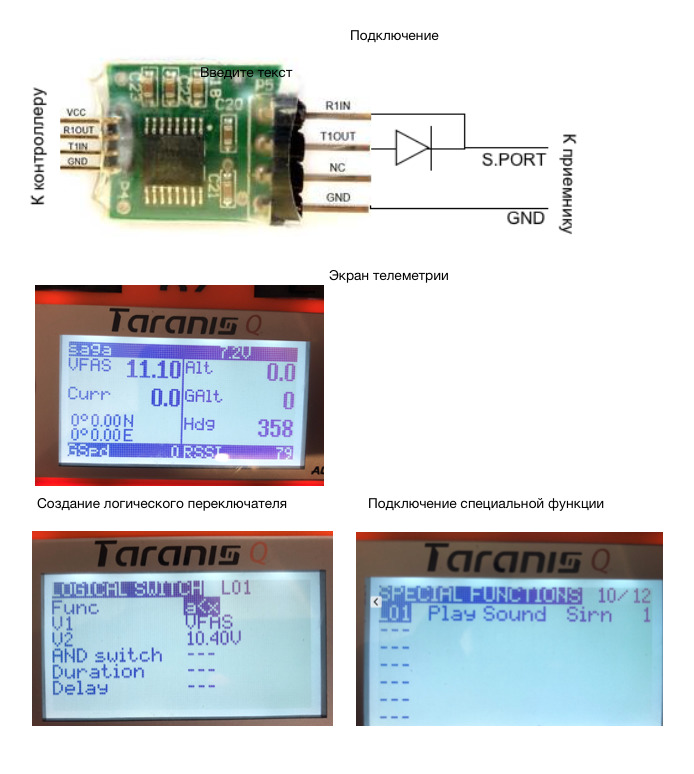
У меня всё это сделано на приемнике FrSky X8R. Для того, что бы получить телеметрию на пульте надо, по идее, прикупить пару модулей (точнее один. об этом чуть ниже) - __ вот такой __ __ и вот такой __ (он, как раз, нахрен не нужен).
Первый модуль подключается к порту телеметрии контроллера (на самом деле, к любому UART-порту, главное потом в настройка MP включить телеметрию на нужный порт), а второй модуль… второй модуль выкидывается к хренам, а вместо него просто впаивается диод между RX и TX первого модуля 😃 Я выпаял первый попавшийся из-какой-то платы (мне было важно что бы он был как можно компактнее). Затем пара проводков от первого модуля цепляется на s.port приемника X8R.
На аппаратуре я сделал примитивные настройки (думаю, если покумекать можно всё сделать круче).
Далее вся телеметрия отображается на аппаратуре (надо тыкнуть настройку на странице Telemetry т там сделать настройки). На ютубе ролики есть на эту тему, описывать не буду, там всё просто. По идее там сразу видны все сенсоры. Ну можно тыкнуть пункт Discover new sensors - будут найдены все доступные сенсоры. Потом идёте на страницу Display и там добавляете те сенсоры, которые хотите видеть на экране телеметрии. Экраном телеметрии можно несколько настроить. (черканите если нужно, распишу всё подробнее тут).
Далее на Таранисе идем на страницу Ligical Switches и создаем новый логический переключатель (у меня его имя L01), потом на странице Spetial Funtions создаем новую функцию которая вызывается при срабатывании логического переключателя. У меня там просто вызывается звуковой сигнал. Можно какой-то другое оповещение настроить (потом по-экспериментирую). Всё ниже на картинках
Да. Телеметрию перестраивать не пришлось. Попутно разобрался как заставить аппаратуру сигналить, когда аккумулятор на квадрике разряжается до определенного значения.
Да что-то привык пользоваться Radiolink AT9S. Там как-то всё просто и понятно. У Юлиана, к стати, путаница в ролике есть. Он там говорит про международные прошивки, а файлы выбирает LBT. LBT это европейские прошивки. FCC международные (ну или штатовские). Я сначала поставил те, что LBT (только там, какие-то файлы маркируются как LBT, а какие-то как NONEU и вообще все ко всему биндится перестало (у меня еще дрон есть с приемником XSR, тот то же отвалился). Потом вспомнил про хабсан свой, там как раз перешивали все их на FCC прошивку.
Заработало ! Антон, огромное спасибо !
Да - все три выбираются. X8R я так понимаю, через внешний XJT прошить можно ?
Хм… еще и такое может быть… Где посмотреть ?
Проблема вот в чём… Я пытался биндить этот приемник без модуля. На приемнике джампер не установлен. Т.е. включена Mode 5 (т.е. режим D16, телеметрия включена, выводимые PWM CH1-CH8). На аппаратуре выбираю D16 нажимаю bind, там появляется список из которого выбираю CH1-CH8 telemetry ON, зажимаю кнопку на приемнике, включаю… и ничего не происходит. Т.е. красная лампочка просто горит. Ради интереса перепробовал все варианты из списка bind на аппаратуре - результат тот же. Плюнул… воткнул внешний модуль. На аппаратуре выключил internal radioo, для external указал режим xjt. Тыкнул bind, зажал кнопку на приемнике - красная лампочка замигала, всё работает. Честно говоря, самому совершенно не нравится этот огород с пучком антенн на аппаратуре. И уже было закрались мысли, что таранисы бывают разные и мой без XJT… У меня валяется еще пара приемников по-проще, они биндились без каких-либо проблем. Т.е. радиомодуль на аппаратуре исправный.
Этот комплект мне достался почти на халяву 😃 Слышал что он более навороченный (хотя, слухи и не более). Честно говоря, подружить этот приемник с аппаратурой без этого модуля у меня не получилось (вероятно что-то не так делал). Что бы они заблудились нужно выбрать режим XJT, а у меня на тараните, без этого модуля, нет такого режима. Может таранил какой-то не такой… Так же толком не понял, будет без этого модуля идти телеметрия на экран тараниса или нет… В общем, с Таранимом только начал разбираться. Если подскажете чего, буду очень благодарен.
Да и фиг с ними, с ценами. Этак можно всю жизнь прождать, пока что-то приедет. Вообще, последнее время в аир хобби заказываю многое. До Новосибирска 6 дней. Результат “экономии” на Бангуд: пришел аккум для фантома. Сгорела электроника после первого полета. Из 4500 руб. вернули 1500. В конечном итоге заказывал на али за 7500. Т.е. акул обошелся мне в 12000 руб. У очков скайзон через пару недель перестала работать запись на СД карту. Вернули 2500. Заказал у скайзона модуль ДВР за 3000 руб (и еще х.з. в нем проблема или нет). А по последним недоставкам вообще два проекта накрылись медным тазом - планировал в июне еще сделать, а теперь времени на них не будет. Такая вот “экономия”.
Я двигаюсь но медленно, приехала рама XL8 360mm.
А моторы никак бангуд не хочет отправлять, типа нету… хотя уже две недели стоят как в наличии. Видимо просто с купоном хотят меня обломать.
Теперь в раздумьях может на али заказать.
2216 хотел, может что получше взять, но не слишком дорого.
EMAX mt2206 II или EMAX mt2208 II ?
Посылайте Бангуд по дальше. Не контора, а бедлам какой-то. Больше не буду с ним связаться никогда. 12 заказов. Из них два брак (кое как выкроил хотя бы часть сумм). Последние 5 заказов шли свыше 60 дней ! В конечном итоге жду возврата денег по всем пяти. Трындец !
В том же Таранисе это все делает сам приёмник и зачем вся эта информация на экране передатчика?
Дошло дело до Taranis… А подскажите, как “это все делает сам приёмник” ? А точнее, что именно “это все” ? Минимальные требования: на экране пульта должно показываться напряжение на коптере и количество найдены спутников. Пульт должен как-то оповещать о низком напряжении (вибрация, звук и т.д.). Вы уверены, что это всё реализуется так просто, как Вы описали, при использовании Taranis с Pixhawk ?
Видел про ваш коптер в 330 ветке, себе тоже заказал мавиковские моторы, но рама будет полегче и планирую использовать 18650 аккумуляторы.
Интересно узнать вес мавиковского мотора, если замеряли, а так же, ток висения коптера и токи на 100 газа.
Спасибо
Увы… что-то не удосужился ни взвешиванием ни замерами. Пока еще не взял в привычку.
“Никто не хочет двигаться в сторону минимизации”… Как в рекламе (только наоборот) - “хочу, но не могу” 😃 На самом деле тут беда с рамой. Делать дрон не складным мне не хочется (есть пара комплектов нескладных для баловства). Мне больше приемлем размер 330-350, но, SAGA или еще подобного, в таком размере нет (На Али видел у одного продавца, но там и продаж ноль и отзывов нет. Побоялся брать.). Потому задумка проста. Я хочу взять 450 раму (складная SAGA) и обрезать её до 350 размера (это размер DJI Phantom).
С “моим сетапом” я не буду никаких рам в планы ставить или еще чего. Этот сетап задуман именно под эту раму 😃 В шкафу валяется еще штук пять разных сетапов. С ними и будут другие эксперименты ставить.
Вот, сейчас на сборке вот такая хрень стоит - летающий штатив для Onepaa x2000. Чуть позже про неё тут напишу. Но она ничем не выдающаяся. Обычная рама. Обычный сетап. А Охотник, он прикольный. Мне интересно с ним ковыряться. Получится чего или нет из задумки 😃 Писал уже где-то… Для съемок у меня Фантом есть. Там всё ясно и понятно - тыкнул кнопку и полетел. Скукота…
Нет. На эту раму подвес ставить не буду. Он и не планировался как дрон для какой-то хорошей съемки. Попробую выжать по максимуму из того, что есть и нормально. За коршунами пойдёт гоняться 😃 Тут еще для экспериментов поле непаханое 😃 Под съемочник отдельный комплект набираю помаленьку. SAGA F450 складная на Naza m lite. Подвес Tarot TL3T01. Камера YI 4K (или GoPro Hero 3+ за недорого с ebay…). Рама долго едет. Должна через недельку прибыть по идее.
Нереально реально ! Это всё своими руками ?
Ага - есть мысли про 3Д принтер 😃 Присматриваюсь, почитываю. Наза лежит пока в коробочке. Под неё вот эта рама едет (только думаю укоротить её до 350-го размера). 3-х осевой подвес уже привезли. YI 4K то же с зимы пылиться. Съемочник буду собирать в альтернативу своему Фантому. Матек еще один заказал. Прикольный контролер. Понравилось, что всё на распайке, без всяких разъемов. Получается всё аккуратно и компактно. Количество портов на все случаи жизни. А вот по прошивке… всё таки ArduPilot прикольнее, потому Pixhawk не долго будет на полке лежать 😃 Тема сама - да, очень затягивающая. Особенно с нашим нынешним “летом” (погода просто дрянь, лета еще и не было).
😃)) и песенку в тему прям. Не… я в лесу больше испытания проводить не буду. Сильно чревато развлечениями. Месяц назад Hubsan h501s со сбитыми калибровками притаскивали. То же что-то поторопились с запуском среди деревьев. В результате бегали за 7-ми метровой удочкой и с снимали его с крыши автомобиля. Очень забавная была картина, когда два человека (одному под 50, а другому за 50) с крыши автомобиля удочкой какую-то фигню с сосны пытаются скинуть 😃
Супер. Интересно, а с фото с Фантома 3 стандарт такое можно делать ? Честно говоря, не изучал, какие возможности фото у него есть 😃 Снимаю обычно ролики. Сделал как-то пару фоток - не понравились. Забил на это дело. Как ни странно, но кадры с видеоролика получаются качественнее.
Pixhawk в настройке в разы проще Matek. Два дня на матке с ПИДами мудохался под свою нестандартную комплектацию. Сегодня залетал нормально более-менее 😃 На Pixhawk как-то стразу, поле монтажа, полетел. С вибрациями и вздрагиваниями, конечно, но вполне себе летабельно. На Матке сразу, со старта в сосны улетел. Сам как-то газ в пол и вперёд 😃 Нет абсолютной гармонии в этом мире 😃
Ок
Я же в заголовке пишу “записки камера” 😃 Модуль подключается к контроллеру штатным шлейфом, идущем в комплекте (это готовый комплект поставки - контролер+GPS модуль+PDB+шлейфы). Там другой не воткнешь (у Pixhawk mini специфические разъемы). Хотя, Вы меня сейчас навели на мысль - а не проверить ли этот штатный шлейф на момент правильности распайки. Ну и, всё таки, что бы что-то куда-то подключить по распиновкам, у меня знаний хватает. Про PX4… Вы меня немного удивили своим вопросом… Для Pixhawk можно использовать две прошивки - Ardu Pilot и PX4. И “чего он там не видит” я писал в предыдущих записях в дневнике. Пытался добиться ответов в ветке Pixhawk и списывался на GitHub у разработчиков PX4 (я же Вам выше ссылку привел на переписку). Симптомы там просты - NO MAG SENSOR 0 😃 И еще… у меня не MINI PIX у меня PIXHAWK MINI. Не знать что такое PX4, путать Pixhawk Mini с Mini Pix… смешно же для специалиста, не правда ли ? 😃… Заканчивайте уже меня гнобить, Артём и пытаться тыкать носом в каждой своей записи 😃
PS. про жпс модули… очень сомневаюсь, что модуль, который шел в комплекте был не рабочий. Скорее всего вы чего то не знали/не знаете. Модули перед подключением к ПК стоит проверять в уболкс центре. И там его можно правильно настроить, сменить параметры, перепрошить при необходимости. Советую не лезть в него с паяльником, а сперва проверить в проге.
Компас, как правило, рабочий. Максимум, что я встречал, это намагниченность. Но сам по себе не живой чип, не попадался. То что компас подключился, можно проконтролировать по его id в фул параметр лист. Если нет, то проверить правильность подключения sda и scl.
Ладно, я допускаю, что из-за это всего возникают проблемы с калибровкой в ArduPilot, а почему его PX4 вообще не видит ?
И вот теперь попробуйте снова прочитать свой пост, про то, как вы “Устал об этом писать, но Почитайте спецификацию к Pixhawk Mini - у него нет встроенного компаса.”… смешно, не правда ли?
…" Правда иногда, там люди пишут наспех, как Вы сейчас,"…Может стоит сперва разобраться, а не сыпать якобы “фактами”, которые вы сами сочинили не понятно с чего…
Особенно улыбнуло, про второй компас в модуле BN880… наверно, сделан по спец заказу, именно для Вас… тоже факт наверно 😃
Это мой дневник. Тут мысли в слух. Не нравится - не читайте. Всё, вроде как, просто 😃 Если бы я здесь этого не написал, Вы бы не вступили со мной в спор и ничего не начали доказывать. Для того и пишется, что бы разобраться.
“И в описании по вашей ссылке, компас вроде блокировали для РХ4.”… ну вот теперь, вроде, мозаика складывается. Т.е. тот модуль GPS, что шел в комплекте, нерабочий (точнее, там нерабочий компас). В результате PX4 не видела ни одного компаса, а Ardu Pilot видела только один (встроенный), но ничерта не хотела толком калиброваться. А когда я подключил другой модуль GPS (рабочий) всё встало на свои места. Надо просмотреть плату “Штатного” GPS модуля. Может где не пропаяно чего толком. Спасибо Вам, Артем, за информацию !
Олег, ерунду пишите! Мы наверно разные спецификации читаем по вашей ссылке 😃.
вот выдержка из описания:
Sensors:
Accel/Gyro/Mag: MPU9250
deprecated by the PX4 firmware
Accel/Gyro: ICM20608
Barometer: MS5611Вроде же написано? Поясняю. В чипе MPU9250 есть аксель, гороскоп и КОМПАС. Компас хреновенький но есть. И в МП он виден, как второй компас.
И еще… Вот фотография вашего BN880 - расковырял собственными руками. Где там два компаса? чип один - HMC5983.

Ну, не знаю, чего сказать. Вот переписка на GitHub github.com/PX4/Firmware/issues/9572#issuecomment-3…
Среди ответов “@Texnovik Do you have a GPS-Compass unit connected? Pixhawk Mini does not have a usable internal compass.” Хотя, можно перевести и как “не имеет нормального встроенного компаса”… Соответсвенно, если отключен веншний компас, то ни PX4, ни AdruPilot не показывают ни одного компаса.
При подключении того GPS модуля, что я привел, и PX4 и AdruPilot показывают два компаса. И, почему-то, у продавца на Ali обозначено, что “двойной модуль компас”, хотя и тут, возможно, имеется ввиду двойной модуль - gps и компас.
Прокомментировать ничего этого не могу - просто вот такие факты. Но, возможно Вы и правы. Может у меня компас в контроллере глючит. Может и отображается два по каким-то другим причинам… С родным, входящим в комплект поставки, GPS-модулем отображался только один компас (возможно из-за того, что весь этот модуль кривой) . Х.з. я тут, всё таки, в этих делах, ламер 😃 Вам спасибо, что уделили моей писание такое скрупулезное внимание. Буду ковырять дальше ибо теперь вопросов стало еще больше 😃 Теперь уже появились сомнения - а всё ли нормально у меня с полётными контроллером в целом…
Ну так совсем рядом. Мы летаем на поле за ИЯФом:
…
Правда, график плавающий; не уверен, что на выходных соберёмся, хотя и надо бы.
Да там и погода, не сказать, что сильно лётная. Во вторник разве что, но это день для рыбалки (может РИБ наконец на воду скину). В общем, 89231744850 это мой телефон. На нем висит Вайбер и ватсап.
Олег, кто вам сказал, или точнее, из каких соображений, вы решили, что в стандартном GPS BN880 поселилось два компаса?
Там один компас HMC5983. Если бы вы потрудились почитать соответствующие ветки, то знали бы о существовании компаса на плате ПК. И вот в варианте с внешним компасом, видно действительно 2. А какой вы будите использовать, сами должны назначить.
- Устал об этом писать, но Почитайте спецификацию к Pixhawk Mini - у него нет встроенного компаса.
- Вот ссылка на компас. Смотрите описание “сдвоенный компас”. Это слоеный прирог из двух плат 😃
Вот из таких соображений я решил… А еще, потому и написал, что такой вот интересный факт 😃
P.S. Тружусь, ветки читаю. Правда иногда, там люди пишут наспех, как Вы сейчас, потому больше стараюсь ковырять сам и больше читать на сайтах производителей и разработчиков 😃
Нижняя Ельцовка 😃
Поздравляю! PRM-03 можно разбить молотком, телеметрию в видео, желательно на шлем. Рано или поздно все к этому приходят 😁
Нет. PRM-3 выбран совершенно осознанно. Телеметрия должна быть на пульте. Этот дрон, большую часть своего времени, будет использоваться в пределах видимости. Т.е., подключать монитор или очки я буду к нему достаточно редко. Обычная OSD уже приехала. В выходные поставлю. Дальнолет делаю на матеке. Потом, по мере поступления деталек, буду писать, чего и как.
Нет у Pixhawk Mini встроенного компаса. Только один - внешний и похоже он сильно нездоров 😃