Activity
Оптимальны - это значит обеспечивают достаточное ( входящее в окно нормы) регулирование в результате воздействия
Просто по моим наблюдениям PD не очень оптимальная мат модель для коптера. Из-за сильного недорегулирования в зоне малых ВВ при гарантированном НЕ раксколбасе при больших ВВ.
Только пришел я к этому от обратного.
Есть вот такой девайс
Что бы добиться хотя бы такой стабильности, настривать пол часа, и это до первого падения. мотор чуть не ровно приклеил и все по новой.
у него очень низкая приеместость у моторов. Для вия P=2.5 всего, D=50. Но для идеального спокойного воздуха выкручивал и до 6(взлетал очень аккуратно с сетчатого покрытия), и тогда он стабильный. но это до первого заметного “порыва ветра”. Прошивать регули тогда еще не умели. Изначально он был на выпиленном ITG 3205 и ADXL 345. Вот и начал искать что там можно “математикой” сделать.
к примеру в ардукоптре
стаб пиды: угловая ошибка * стаб P,D
рэйт пиды: ошибка угловой скорости * рэйт P,D
управляющий сигнал: стаб+рэйтгде
угловая ошибка - разница между желаемым углом рамы к горизонту и фактическим
ошибка угловой скорости: разница между текущей угловой скоростью луча и требуемой для достижения поворота на необходимый угол за константу времениугловая скорость и инерция по вращению
что то типа
m*d*omega=Ftв первых прошивках были только стаб пиды, настроить было крайне сложно и нестабильно было от мощности и напруги
Да я примерно к тому же и пришел. Там мрак…
3х мерная матрица Тяга по времени, а по ось Z это все еще по просадке lipo.
Плюс все вся эта матрица работает для отдельно взятого lipo. Для нового все по новой мерить. + нужны свои регули. Что бы знать обороты моторов и управлять ими так, что бы матрица соответствовала действительности. + еще амперметр и кривая зависимости тока от напруги(для оси Z матрицы).
Все это интерполировать никакая ардуина это не потянет. Так STM32 c железной точкой в шкафу и лежит 😃 В обшем я забил - жизни не хватит 😃
Да и итоговую кривую(Р это прямая кривая) можно имперически вывести, но силенок уже не хватило 😃
Да и тут недавно почитал как NASA делала управление DC 10 без гидравлики, только дрыгаетлями. Даже они не асилили и попросили сделать honeywell(кажись) что бы управление тягой было линейным 😃)
Да смое главное забыл. Все эти ужосы нужны что бы знать кривую F(тяга мотора) по t. Как только площадь под кривой Ft = mV(измеренной гириком) меняем знак управляющего воздействия на противоположный. Вы идеале все устаканиться с первой попытки - скорость моторов с противоположных сторон и V в 0.
и параметры ПИД не оптимальны для текущей передаточной характеристики ВМГ (приёмистости).
Все еще хуже 😃) Параметры ПД(И оставим в покое) оптимальны только для определенного возмущающего воздействия. Если настроить пару ПД на импульс Х, то для импульса 2*Х регулятор говоря Вашим языком “проскочит” - т.е. перерегулирование. И соответственно наоборот.
вот тут я пытался это наглядно показать, замедлено в 10 раз
Когда то пробовал считать через mV=Ft. Но расчетные обороты моторов разбегались с истинными(еще бы 😃, а мерить реальные мне стало лень 😃 - просто сменил работу 😃
PS На всякий случай уточню. Если коптеру на луч повесить грузик с ПД - получим постоянное вращение(до неприличных углов), с П И Д наклон. Адаптацию я так ниасилил сделать. По этому в ВИЕ добавил множители на каждый мотор и настраивал в висение в горизонте без постоянного наклона с И=0. Так он себя вел на порядок лучше. Дело же не только в ЦТ - каждый китайский мотор уникален 😃)
идея дожать пропорцию до реальной (в момент расчёта регулятора)
Ааа, перечитал еще раз - дошло 😃 Это все блохи не имеющие ни какого принципиального значения P и i то эмпирические были. И сами эти коэф. зависят от соотношения момента инерции к моменту от моторов грубо помноженное на приемистость моторов. Т.е. определяющем являеться не как скорость мерить, а физические параметры коптера. И вообще чем больше настроек тем лучше 😃) не ? 😃)
берём D и им тормозим P - опять попандос
С D мат модель чуть ближе к физической. То что D тормозит P(когда скорость и ускорение в разные стороны направлены) наоборот хорошо. Но все равно далеко от иделала. На разные возмущающие воздействия(по переданному импульсу) нужны разные PD. Ну и PID при слабых воздействиях толком не работает(в т.ч. по описанной выше причине) от этого коптер так на подушке ерзает и в ветер раскачиваться…
вот на такой хрени
реакция нужна как у кошки что бы в дверной проем пролететь по ФПВ 😃. Ветер от собственных винтов…
ЗЫ c Вашим dt я если честно идею не уловил…
КУК прекрасно переносит )))
Если сравнивать с автомобильными подвесками то это начало прошлого века. Обычный амортизатор трения. А если посмотреть на WRC… то небо и земля. Причем сейчас на дорогих версиях серийных машин амортизаторы(типа бнв эмок, мерсов ML и прочих ауди РС и ипрез врыкс) по скожей технологии сделаны. Однотрубные с газом высокого давления 😃) Они позволяют юолее правильную регрессивную характеристику выдерживать.
U = K*(angle + vel*dt1)
Это аналог PI. С настройкой(К) вынесенной за скобки. Без D будет расколбас при прочиъ равных и не раздельно P и I настраивать тоже не очень. Как то так КМК…
ЗЫ PID и то слишком примитвный, там не упрощать а усложнять надо, но с этой гребанной работой все лень/некогда 😦(
в винде (я про делфи) можно ловить хоть каждый байт, это проблем не создает
Я вот тоже так думал, но C# чета не хочет. ComPort это какой unit в Delphi? сколько лет ее юзал но не приходилось 😃)
А с 4 мя ком полюбому многопоточно надо общаца, либо оно само асинхронно на событиях, либо руками многопоточно(что коряво КМК)… Com можно открывать/закрывать тока из основоного потока, иначе оно ругаецца 😃
Открывать ком порт и читать из него:
угу, погуглю спасибо
Можете хоть каждый бит ловить )))
Вот не сомневался что где-где а тут опытные умные дядьки помогут 😃)
я просто по базам и гуям, а тут пришлось 😃)
c# для этого использовать наверное жестоко. Попробуйте реализовать на C или другом языке.
Там проект весь на C# хотя ничто не мешает DLL ку сделать на С. Это хотел в первую очередь проверить, просто мне кажеться все же особенности винды а не .NET
Алексей а как на тех же “ардуинах”(плату разводить времяни тоже нет 😃) там можно каждый байт считать? не пробовали случайно? Если можно это правильнее чем С на винде…
И еще раз спасибо за отклик 😃
Посмотрите в сторону размера буфера FIFO в настройках драйвера COM порта
Тут я не вьехал. В C# в SerialPort есть размер буфера чтения, но она его игнорирует. Ставлю скорость 115200 и буфер 1000, а по факту буфер вообще 4 килобайта и боюсь что винда просто не успевает(на каждый вызов события или в петле если синхронно читать). Спасибо, в дровах попробую. COM порт железный, там мамка т.н. встраиваемая у нее 8 железных COM 😃.
Да и попробую ftdi хрен с ними с железными, в них-то такой настройки я не видел…
Тут очень умные дядьки 😃). А никто в винде с COM портом не воевал? Сейчас событие “datareceived”
msdn.microsoft.com/…/system.io.ports.serialport.da…
винда дергает раз в 15 байт в буфере или ~7 миллисекунд, скорость(19200). А низзя винапи пнуть чтобы на каждый байт вызывала? Или в мультизадачной системе это анрыл и не выпендриваясь сделать на микро контроллере? Как на тойже ардуине мега с этим никто не проверял? Совсем нет время на изучение мат части 😦
ЗЫ задача максимально синхронизировать 4 COM порта… как можно точнее… Сори что не про коптеры…
Опишите Ваш конфиг, пожалуйста!
rcopen.com/forum/f123/topic265297/22
Тока это не актуально давно.
Щас бы я звял моторы чуть мощнее, под бадарейку панасоник PF. Он потяжелеет грамм на 20. Но она 3х амперная летать должен намного дольше + постабилнее будет. Ну и регули перешить(я это софтом решал)
Ваше уг мы не помним, к счастью скорее всего.
Мое УГ самое маленькое, в этой теме на безколлекторниках.

И без камеры летает ~18 минут(с круглыми турнигами, тока качество там ниже плинтуса), с панасониками должен 30+ минут с нынешним 2х граммовым мозго-приемником(но камеру не повесить). В прочем с нынешней 2х граммовой эллектроникой, он и с 1 амперной, турнегой минут 25 пролетать дожен, экономия 10 грамм все же.
У ВИЯ сильно D шумит, если подпилить софтину жрет намного меньше(иначе дофига “регулирует”). Ну либо такое мелколет будет адово не стабилен.
Кстати для Piranha ты вроде в этой теме спрашивал про качество видео с граммовой камеры, вот с линзой широкой
Но это камера не любит солнечный свет, все как в тумане становиться.
Я (если кто еще помнит) начал этим занимацца еще 3 года (мелкими) назад(тогда под мультивий еще iitg…05 выпилавли) фу…
а мультивий как был уг так и остался…,перечитал всю тему, ниче не изменилось
из 168 328 в 8-ю не проканает
Ой да, спасибо. Я просто забыл спросить, канает ли bootloader из 168й в 8ю.
Спасибо еще раз, в понедельник попробуем.
где-то я что-то другое видел, может ошибаюсь, но берётся всё с ft232 и кидается на spi, типа можно даже саму себя прошить как через stk500, может чего путаю?
Я не очень в этом разбираюсь, по этому и прошу помощи. А кстати если авр студио выкачать весь “код” из ардуины и попытаться прошить, проканает же наверно?
еще у меня есть такая хрень

Это и есть ISP programmer? Просто он дома, а дело было на работе, не пробовали пока.
ну конечно выбирали и вообще все попробовали 😃
Я просто не знаю где взять hex этого bootloadera что бы попробовать avr studio прошить вот и пробовали так…
мы пробовали вот так
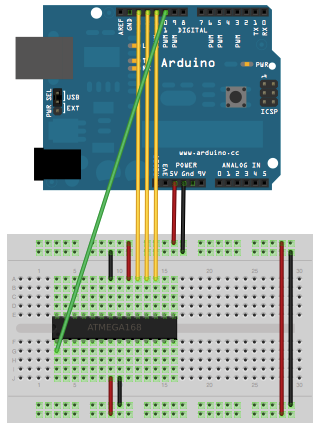
по вот этой камасутре
arduino.cc/en/Tutorial/ArduinoISP
через “burn bootloader” из ардуино айд, т.е. самым лашпетным методом 😃
Но ругается что атмега не та, пытались прошить atmega8a
сори за ОФФ, нужна помощь зала. Ктонибудь прошивал ардуиновский bootloader в атмеги?
стукнитесь в личку плиз, что бы тут не мусорить - есть пара простых вопросов(не получилось прошить)
За такие убеждения тебя брат нужно пожизненно лишить прав.
За езду только трезвым прав лишать? - ну ок, че 😃)
бггг 😃)
Примерно догадываясь о стиле жизни нашей “музыкальной элиты”, я сомневаюсь, что он умел хорошо водить (о какой-то подготовке типа ралли тут явно речь не шла)
я к слову даже с лехкого бодуна за руль не сожусь, и не по тому что прав лишат, а не получается ехать нифига, башка квадратная, прямой путь к крэшу.
ага-ага про ралли особенно
Что с ралли не так? Знаешь как бывает конда сам едешь? Видишь грядка из овощей(зрителей) огромная, краем глаза подыскиваешь место убора мимо грядки, хоть в дерево хоть в стену, на капоте кого-то катать - последнее дело, у меня хоть каркас шлем и т.п…
ЗЫ я ща про торможение в затык с ходярника. Пока тормозишь, покурить сходить можно успеть и подумать о смысле жизни. А в скоростных местах грядок из овощей ни разу не видел.
Одно дело ехать быстро по прямой, другое дело всех обганять и подрезать и создавать аварийную ситуацию. Я не думаю что он просто быстро ехал.
Ну я примерно так и езжу 😃) понты тут не причем 😃 Аварийных ситуаций правда не создавал, только спас штук 6 никчемных жизней. Но это не означает что завтра ошибусь я и наломаю дров.
Ну недавно вертолетом себя убил пилот в европе. Коптеры тоже разные бывают. 6 кило на голову…
Спасибо я примерно о том же. А если умножить на миллионы разницы в количестве… 😦
Что конкретно изменилось по вашему мнению из того что не хотят принять?
Лень было, но все же отвечу. Выросло поколение не видевшего рабства совка и чья хата не с краю.
Возможность пукать о себе на всю страну?
Они Вас не оскорбляли, не позорьтесь.
Возможность безнаказанно подняться над участком соседа и снять его личную жизнь и потом растрепать на видеопомойке?
Это политики - люди публичные, а не просто люди.
Возможность вопить о беззаконии и самому творить что хочешь?
Т.е. вы признаете что творите что хотите? Или что имелось ввиду?
Поддакивать тем кто не согласен не вникая с чем и кто не согласен?
Не сидеть на жопе ровно это называется.
Мне абсолютно параллельно у кого какая дача (как и Ваша в том числе) и сколько денег у кого в кармане. Я считаю только свои
Мне тоже параллельно какая какая у вас дача, вы не политик и не публичный человек.
При этом меня удивляют восторги марионеток толпы, восторженно вопящих от свежевброшенных компроматов и неожиданных разоблачений. При этом совершенно не вникающих кто, откуда и зачем этот копромат вбросил и куда эта толпа хлынет в следующий момент.
Это типичный совок и рабская психология, увы 😦
ЗЫ, я не в восторге от того что они сделали, но они не идиоты, не надо оскорблять кого-то - может вернуться, да и не прилично это.
От полетов на квадрике окружающие люди остаются живы.
Я писал выше на страницу, стоять в уборном месте на ралли не так стремно как когда эта хрень над тобой летает(машина хотябы тонну весит = инертная = убежать успеешь, а эта хрень?). Убить квадриком сложно, но можно, и давай сравним кол-во квадриков и автомобилей. С современном авто убицца тоже еще постараться нужно.
Самооправдалка в мозге великая вещь, еще круче инстинкта размножения и выживания.
Понты. Вот уж точно - “давай до свидания…”
А потнты то тут причем? я в этом месте когда никто не путаецца под ногами ездил 120, на старенькой ауди 80, какие уж тут понты 😃) Кто то любит на квадриках летать, кто-то быстро ездить, что такого?
Сергей, не хочу показаться назойливым, может что-то не то про Коровина прочитал, но там речь вроде идёт о сопровождении с машинами ГАИ…
Иииии? пошли они в жопу, уроды
Виталий, вокруг Мариуполя нет объездной дороги.
Ну не помню я уже, нет значит нет.
Вы видимо не догоняете, какую мысль я хочу вам донести, видимо в Мариуполе нет проблемы с мигалками на машинах, которые не относятся к спецмашинам, поэтому считаю спор глухого со слепым заведомо бессмысленным.
Зато там дорог нет, объездную вокруг этого славного города(если я конечно ничего не путаю, 2 года прошло), я умумукался ехать. Загружать и разгружать разные колесы, что бы подвеску диски и кузов не оставить, и напрыгались тоже вдоволь 😃)
это меня надо))) я раньше её сообщил… на предыдущей странице
не видел 😃), сори
Да блин с декларацией это все извините фигня… вон в новостях показано было тип на дочку собянина 300 метровая квартира оформлена, Сабянин сказал а что у меня все задокументировано и задекларировано, мол да есть и отвалите)))) У вас то нет сидите и завидуйте моча.))))
Вот они охренеют 8 сентября 😃), что-то пошло не так 😃)
Те, кто “решает” всё это и так давно знают
Историю с Вадимом Коровиным наверно придется пересказать.
Не пропустил на Рублевке МВД шишку - завели уголовное дело. Они как и Dronavt не хотят принять что жизнь изменилась. И что мигалка это позор а не привилегия, и что их ненавидят а не с придыханием смотрят, вот и кабеняться.
судя по всему это обычный Ar.Drone 1.0 с камерой гоупро снизу…
Это лишний раз говорит о том что они молодцы. Купили готовое RTF решение и сделали то что хотели, не тряся воздух без привлечения посторонний помощи.
Ну и вообще ссылка на полный оригинал - стреляйте 😃)
navalny.livejournal.com/835847.html
та ладно! D))) Можно подумать, кого-то из вышеперечисленных государственных “героев” завтра же уволят с должности,
Уголовное дело на кандидата в мэры возобновили ровно в день рождения мема “жулики и воры”.
Больше года они мечтают запретить автомобильные регистраторы.
По нынешним законам квадрид с камерой ужЕ - УК.
Продолжать? 😃
А вот это - сказка! Причем без возможности заниматься нашим хобби.
Предлагаю развести полит срачь, раз уж в “курилке” 😃)
Эта “сказка” в головах, вбитая еще в совке. Пришло новое поколение которое совка не видели и хотят жить как люди а не рабы. Это течение истории его не изменить. Если активная часть населения этого хочет так и будет.
Я как конструктор РДТТ хотел бы работать конструктором а не маятся дурью программитом, потому что там платят раз в 5 больше. Ну со мной то хрен бы с ним уже, а молодежь? просирать нефтедоллары, и наследство от СССР?
по комментариям тоже это осуждают. обсуждают видео с болотной с фантома. вроде как того кто снимал немного “поднатянули”
Я этого кого-то(Стаса) спрашивал, никого не натягивали 😃
Это Ваш квадрик? 😃
Я в тюрьму не хочу, конечно не мой. Да и так подставлять моделистов… 😦
Да и мои квадрики летают этак на порядок лучше, хоть и на ВИИ, правда и честно допиленном.
Уроды, слов нет.
Ну почему уроды, на войне как на войне, но глупость они конечно сделали.
ЗЫ с другой стороны, то что я видел в эти выходные в Выборге на награждении ралли Выборг может и к лучшему.
Так летать да и в такой ветер, на таком… ээ из г@вна и веток над людьми(а там много детей было). А тушка гекса весом кило полтора. А народу хи-хи - не понимают что эти циркулярки очень любят падать. Даже подходить говорить ничего не стал, у кого ума на такое хватает - нормальным языком объяснять бесполезно, а кулачные бои это лишнее.
Тутощний “герой” интересно?
Ну все, отлетались 😦 За ссылку думаю меня пожизненно расстреляют раз 10 😃
Ключевые слова Шойгу, Воробьев.
Не получится. что есть ПИД? Пропорционально-Интегрально-Дифференциальный регулятор, т.е. управляющая система (СУ) формирующая управляющее воздействие(УВ) на объект управления (ОУ) исходя из совокупности текущего значения ошибки(П), суммарной ошибки(И), и тенденции изменения ошибки (Д). И чтобы вы не использовали для управления ОУ (аналоговый вычислитель, нелинейное управление, нечеткую логику, дискретный автомат, экспертную систему и т.п. ) ВСЁ равно будет обратная связь и будет компенсация этих 3х (ПИД) составляющих (или большего количества для звена второго и следующих порядков). Всё равно будет отрицательная обратная связь (ООС) по ошибке управления. То есть всё равно будет ПИД (П,ПД,ПИ,П2ИД или ПИ2Д). Кста в КУКе просто Д-регулятор.
Ну это просто куча умных слов хоть и понятных, имелся ввиду сам алгоритм и физика процесса а не математика и теория. Сравни работу подвесок из ролика и гражданской машины, и там и там масло через клапан течет.
Имейте ввиду: если сделаете рабочую модель без ПИД, это как минимум диссертация…
я это в руках держал еще в институте(двигатели ориентации спутника), просто скажут - чувак МАИ закончил 😃))
Как раз теперь понятно. Вы хотите мерить обороты двигателей и брать эти показания для управления. Но тут (чисто мое мнение) будет скорее всего “маленькая” бяка, дело в том что: обороты и тяговое воздействие не связаны между собой линейно из за аэродинамических свойств винта
Кароче не проканало, как я хотел. Мнимые обороты/тяга моментально расплываються с реальными. Хоть и заложил что бы эти вещи сходились(реальная тяга и расчетаная) - нифига. Надо мерить реальные обороты. Но мне че та лень, объем работы великоват. Но фундаментальную задачу для меня это решило вплане понимания процессов(перерегулирование добро а не зло, надо только его контролировать, линейное демпфирование Р зло, будем пробовать регрессивное демпфирование.
Вот этим навеяно c 0:30
Если сравнивать с автомобилями, коптеры находятся на этапе 70х годов прошлого века. Линейная характиристика демпфирования, живыми мы и не сдадимся 😃