Activity
Как я уже писал в теме по этому коптеру, купил его просто на попробовать- сравнить со старой моделью (для простоты буду звать ее неПро). А как оказалось, вместо мексиканского тушкана китайцы подсунули нам шанхайского барса(с).
Не утруждаясь разработками софта китайцы использовали оупенсорсный проект Ардукоптер. Чем это хорошо? Начинающий моделист получает летящий из коробки квадрик уже настроеный производителем. И никакого софта для настройки, четыре полетных режима. В принципе, можно этим ограничиться, для большинства пользователей достаточно. Но это лишь малая часть того, что могут мозги Ардупилот. И грех это не задействовать.
Дискламмер, все делаете на свой страх и риск. За последствия автор ответственности не несет.😉
Опишу, какие полетные режимы можно реализовать:
-Altitude Hold- при среднем положении ручки газа коптер удерживает высоту автоматически, по крену и тангажу как и в нормальном режиме
-Acro Mode- акселерометры практически не участвуют в выравнивании коптера, рулиться как классический вертолет, может делать кувырки
-Auto Mode- автоматически летит по заранее спрограммированной миссии
-Circle Mode- летает круг носом в центр автоматически, пилот управляет только высотой
-Drift Mode- летает как самолет с элеронами, при крене доворачивает по курсу
-Follow Me! Mode- следует за объектом, требуется радиомодем и ЖПС у объекта слежения
-Guided Mode- управляется с наземной станции по радиомодему, по принципу, лети в ту точку на карте, куда я ткнул пальцем или мышью
-Land mode-автоматическая посадка
-Loiter Mode- удержание в точке по ЖПС и барометрическому датчику высоты
-Position Mode-удержание в точке по ЖПС, высота управляется пилотом непосредственным изменением газа на двигателях
-RTL Mode-возвращение в точку дом и автоматическая посадка
-Simple Mode< -по другому курслок
-Super Simple Mode- по другому хоумлок.
-Sport Mode- как и акро, но с удержанием высоты
-Stabilize Mode- выравнивание по акселям в горизонт
Фактически, изначально в Прошке доступны четыре режима полета-
-Stabilize Mode
-Loiter Mode
-RTL Mode
-Simple Mode
Так же в нем по умолчанию отключена полезная функция Geo Fence, виртуальный забор, условно коптер как-бы накрыт большой консервной банкой, размеры которой мы настраиваем, долетев до ее стенок или крышки, он автоматически летит в точку дома.
И отсечка установлена на 10,7В, что не позволяет использовать емкость батареи на полную, это тоже можно изменить.
Для того, чтобы почти все это богатство задействовать нам нужна программа настройки MissionPlanner. Качаем тут.
Шнурок для подключения есть в комплекте коптера.
На сегодня все.
Кто дружен с английским, рекомендую почитать на официальном сайте Ардупилота. Очень все доступно описано, с картинками.
____________________________________________________________________________________________________________________________________________________________
Внимание!
После подключения к МиссионПланнеру не пользоваться визардом и консолью, и не обновлять программное обеспечение, и сразу сделать копию дефолтных настроек.
www.youtube.com/watch?v=iK-1v6wNago
____________________________________________________________________________________________________________________________________________________________
Описываю, как планировать миссию. Коннектимся шнурком к компьютеру(аппаратура включена, батарея в коптере не нужна, он будет питать мозги от ЮСБ порта), открываем МиссионПланнер, выбираем вверху справа нужный порт(где Atmega2560), выбираем скорость 57600, коннектимся, ждем соединения, вилочка на кнопке коннекта позеленеет.
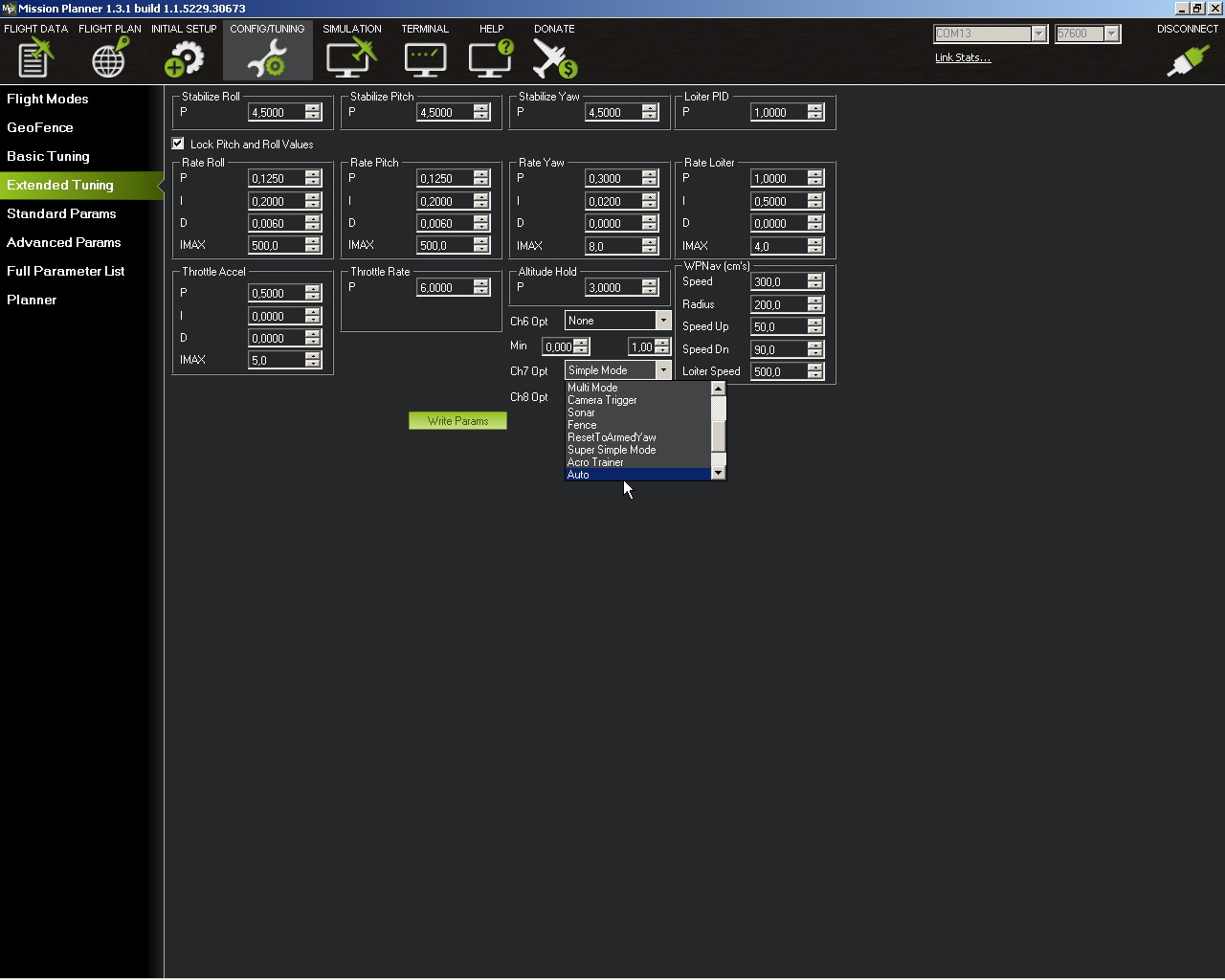
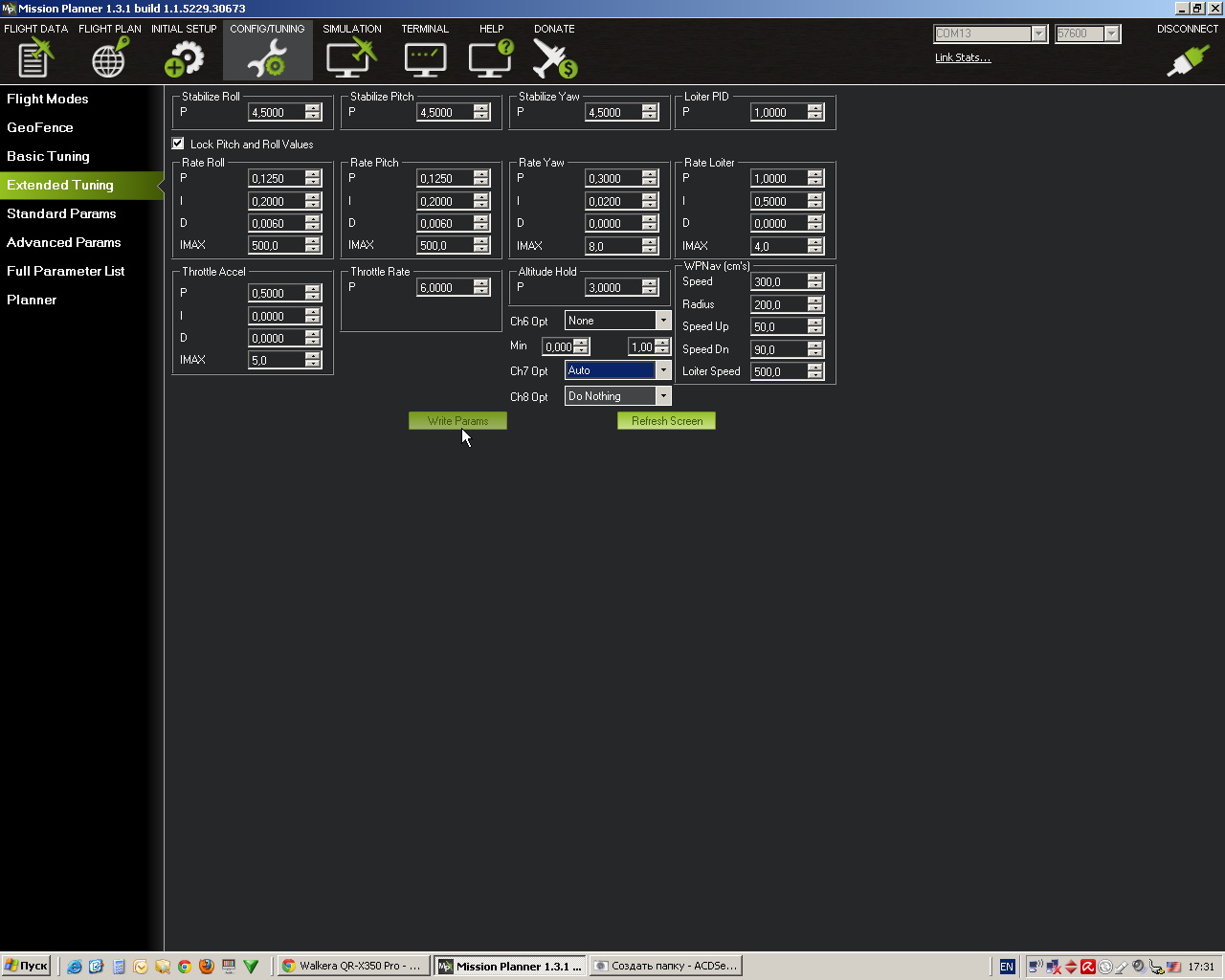
Теперь нужно нам перенастроить тумблер IOC на седьмом канале (этой функцией пожертвуем) на Avto Mode. После переназначения тумблера, нажимаем Write Params для сохранения изменений.
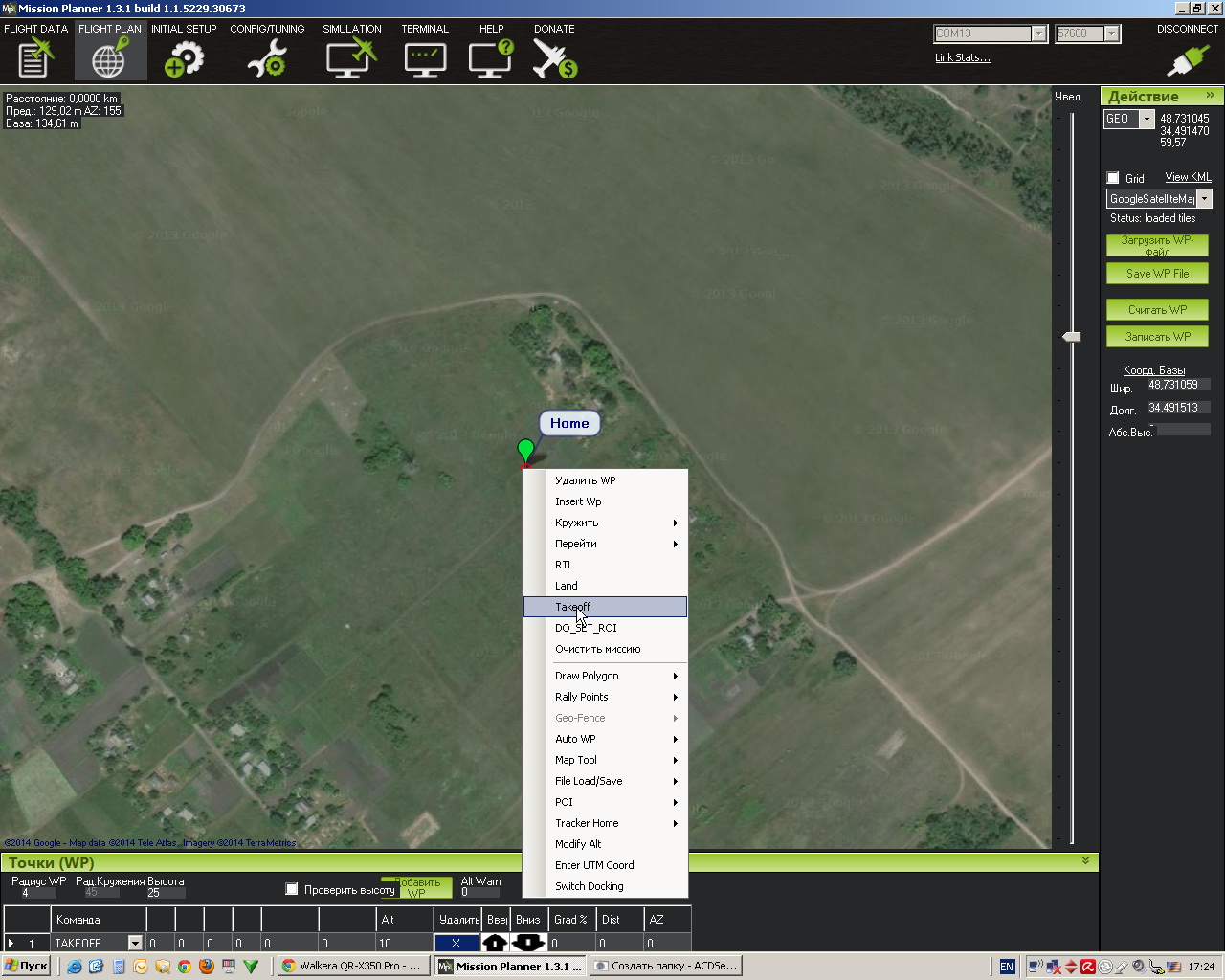
Переходим на закладку планирования миссии, выбираем точку старта, и задаем ее как стартовую Takeoff.
Выбираем в выпавшем окне, на какую высоту подняться после старта.
Расставляем точки маршрута, в примере я выбрал диаметр точки 4 метра и высоту точки 25 метров.

Ставим командную точку возвращения домой RTL.
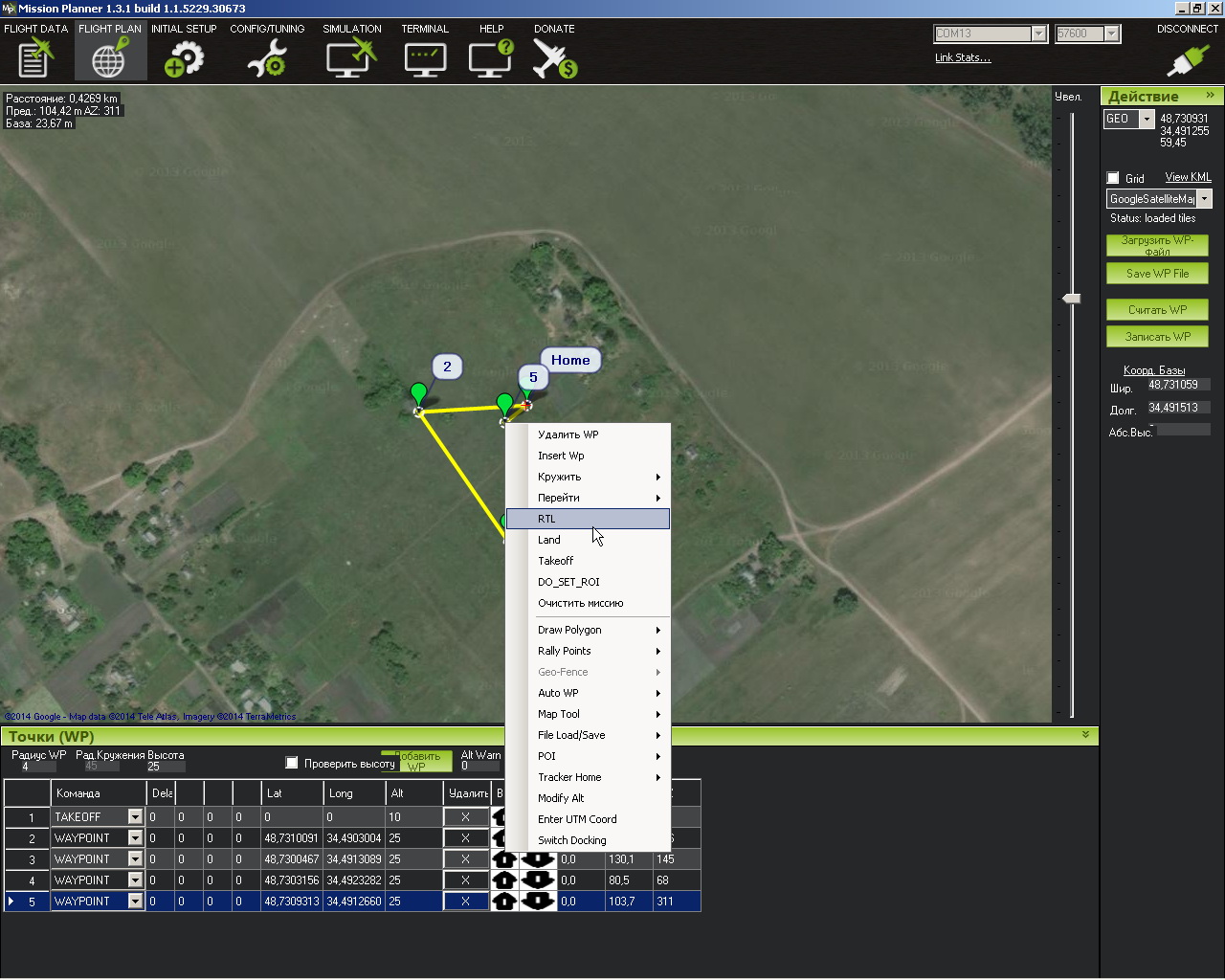
Записываем миссию в полетный контроллер, нажав кнопку “Записать WP”.
Дисконнектимся, нажав вверху справа на кнопку с вилочкой.
Отсоединяем шнурок, выключаем аппаратуру.
Теперь, как летать миссию. Приходим на точку старта, включаем аппу, подсоединяем батарейку к коптеру, и ни в коем случае не разблокируем моторы, пока не получим надежную фиксацию спутников, не менее двух миганий правого светодиода. После чего разблокируем двигатели, переключаем тумблер, тот что был раньше на IOC и поднимаем стик газа до середины. Коптер сам взлетит(его может чуть колбаснуть после отрыва, не страшно), поднимется на заданные 10 метров высоты и пойдет по маршруту. После просадки стик газа вниз и отключить тумблер автомиссии. Заблокировать двигатели. При полете по маршруту, всегда можно вернуть управление, отключив тумблер Avto .
____________________________________________________________________________________________________________________________________________________________________________________________________
По поводу улета коптера, Валкера Про может улететь, если произойдет глюк ЖПС. В Ардупилоте есть настройка защиты, при глюке ЖПС или пропадании сигналов спутников, или забросе трека, можно настроить или автопосадку, или переход в удержание высоты. Ребята из Валкеры решили эту настройку отключить. Так что, меняем в настройке FS_GPS_ENABLE , Disabled на Land и вместо улета, будет автопосадка.

____________________________________________________________________________________________________________________________________________________________
Сравнил полный лист параметров, после перепрошивки Валкеровской 1.1.
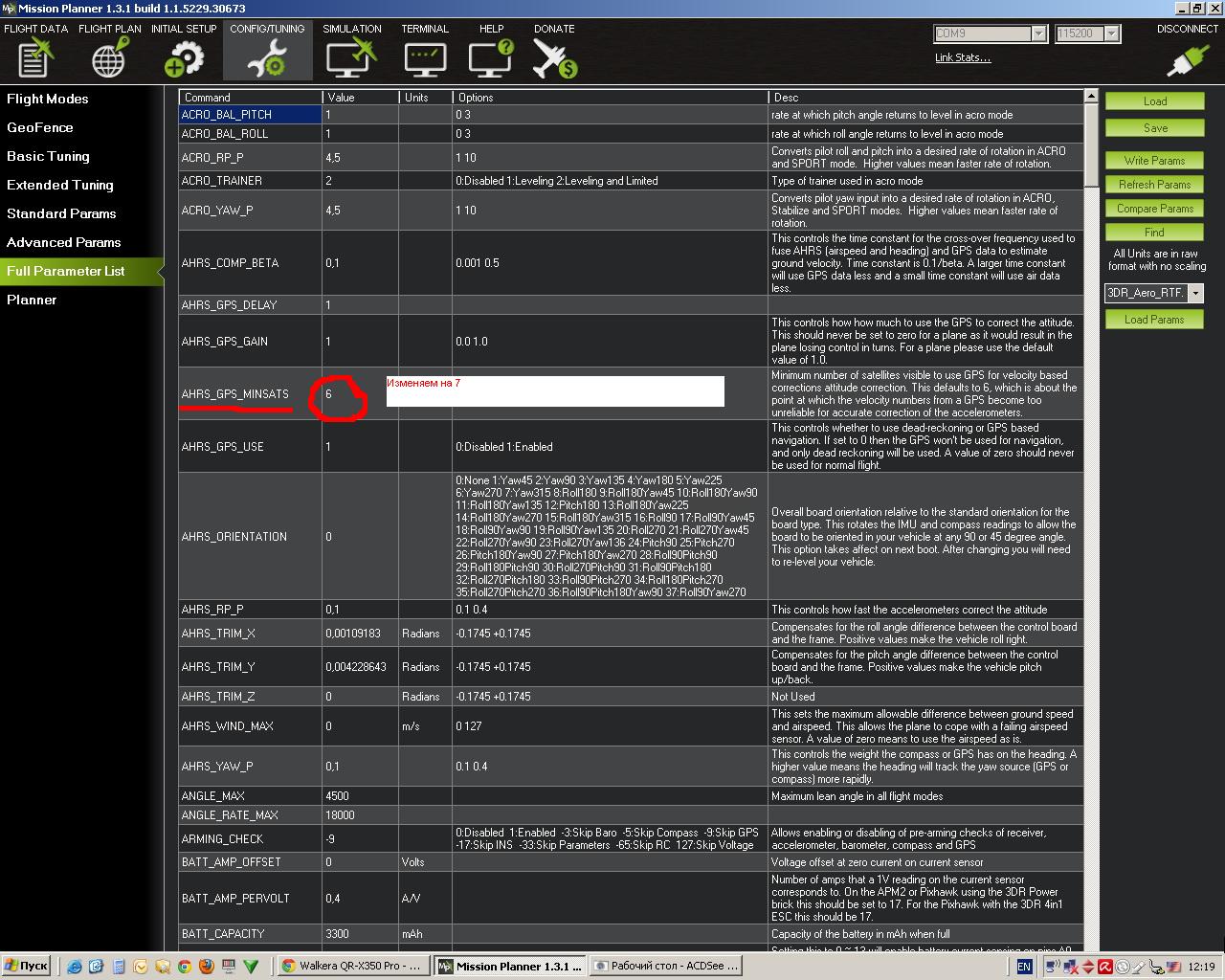
Изменилась всего одна настройка, AHRS_GPS_MINSATS. Было значение 6, стало 7.
Смысл этого параметра в следующем. Автопилот использует скорость GPS для коррекции акселерометра. При малом количестве спутников, точность определения скорости по GPS падает, начинают происходить забросы трека, и чтобы исключить рывки коптера, введен параметр минимального количества спутников, при котором коррекция активна. То бишь, после перепрошивки коррекция будет отключаться, если спутников меньше семи. А раньше отключалась, если меньше шести.
Параметр можно просто поправить в МиссионПланнере и не заморачиваться перепрошивкой через кривой софт от Валкеры, который ещё и драйвер подменяет.
____________________________________________________________________________________________________________________________________________________________
Какие параметры я изменил в Full Parameter List в процессе тюнинга Прошки , и что я этим добился.
WPNAV_SPEED -это скорость, с которой летит коптер при возвращении домой в RTL и во время исполнения миссии. По умолчанию 300см\сек, я установил 900. Теперь коптер домой шустро летит, а не ползет, как финский парень. В принципе, он может и 1500 лететь, но быстро жрет батарейку, да и страшновато со стороны выглядит. ИМХО 900 оптимальная скорость с точки зрения пролетаемых километров по отношению к истраченным амперам.
WPNAV_LOIT_SPEED -это максимальная скорость, с которой летит коптер при полете на нем в режиме Loiter (удержание по GPS). По умолчанию 500, я увеличил до 700.
PILOT_VELZ_MAX - максимальная скороподъемность, которую может задать пилот стиком газа при управлении коптером в режимах, использующих удержание высоты по барометру(Loiter, AltHold, Sport). По умолчанию 250, я поставил 500.
RTL_ALT -высота в см, которую наберет коптер при команде RTL прежде чем полететь домой. По умолчанию 1500 (то бишь 15 метров). Я настроил с учетом, что в местности, где я летаю есть деревья по 25 метров на 3500.
WP_YAW_BEHAVIOR - настройка, определяющая, куда направлен нос коптера при возвращении домой по RTL и при выполнении миссии. По умолчанию 2, я поставил 1 и теперь коптер летит домой развернувшись вперед носом.
И не забыть нажать Write Params после изменения настройки, чтобы она прописалась в контроллере полета.
Мне часто пишут в личку с просьбой пояснить, на что влияют параметры PID применительно к ФБЛ системам Tarot ZYX и Copter-X CX3X1000, а так же просят скриншот Advance Menu моих настроек. Поскольку это весьма индивидуально и на первый взгляд сложно, то я решил сделать запись в дневнике на эту тему.
Запись эта не претендует на истину в первой инстанции, представляет собой компиляцию из собственного скудного опыта и почитывания забугорных форумов.
Дискламер: если кто полезет крутить Advance Menu и разобьёт вертушку в хлам- я не виноват.😉
Что такое PID?
PID - это Пропорциональная Интегральная и Дифференциальная составляющие управляющего контура с обратной связью. Более подробно почитать теорию о PID регуляторах отсылаю в Википедию.
Нас,безусловно, больше всего интересует,как влияют значения на поведение вертолёта? Обьясняю вкратце на пальцах:
Р - это величина корректирующей силы, приложенной для того, чтобы вернуть вертолет в его начальное положение. Эта величина пропорциональна совокупному отклонению от изначальной позиции минус любое командное воздействие на изменение направления с пульта управления.
Более высокое значение Р создаст более мощное усилие по сопротивлению любой попытке изменить положение вертолета(например, порыв ветра). Однако если значение Р слишком велико, то при возврате в исходное положение возникает перерегулирование и, следовательно, требуется противоположная сила, чтобы компенсировать новое отклонение. Это порождает эффект раскачки до тех пор, пока наконец не будет достигнута стабильность или, в худшем случае, вертолет может стать полностью неуправляемым.
Увеличение значения Р:
приводит к большей устойчивости /стабильности до тех пор, пока слишком большое значение Р не приведет к осцилляциям и потере контроля над вертолетом (потере управления). Вертолет будет больше противодействовать любым попыткам извне к изменению своего пространственного положения .
Уменьшение значения Р:
приведет к дрейфу в управлении. Если Р слишком мал, вертолет становится очень нестабильным. Он будет меньше сопротивляться любым попыткам изменить его положение.
I – это период времени, в течение которого записываются и усредняются угловые отклонения.
Величина силы, прикладываемой для возврата в исходное положение, увеличивается, если с течением времени угловое отклонение сохраняется, пока не будет достигнута максимальная величина усилия.
Более высокое I способствует улучшению курсовой устойчивости.
Увеличение значения I:
улучшит способность удерживать начальное положение и уменьшит дрейф, но так же увеличит задержку возврата в начальное положение. Также уменьшает влияние Р.
Уменьшение значения I:
Улучшит реакцию на изменения, но увеличит дрейф и уменьшит способность удерживать положение. Так же увеличивает влияние Р.
D – это скорость, с которой вертолет вернется в его начальное положение. Высокие D означают, что вертолет вернется в первоначальное положение очень быстро.
Увеличение значения D увеличивает скорость, с которой все отклонения будут скомпенсированы. Это означает так же увеличение вероятности появления перерегулирования и осцилляций. Так же увеличивается эффект от изменения Р (влияние Р-компоненты)
Уменьшение значения D уменьшает колебания при возврате в начальное положение. Возврат в начальное положение происходит медленнее. И так же уменьшает эффект от изменения Р.
Условно можно сказать, что акробатический пилотаж требует более высоких значений PID. Что, впрочем и сделал для нас разработчик, заложив некоторые средние значения в готовые пресеты настроек. В большинстве случаев, можно их и оставить по умолчанию. Но для чего тогда нам оставили возможность тонкой настройки PID?
Прежде всего, конечно для удешевления системы, не надо платить профпилотам за работу по поиску универсального соотношения параметров PID. Но так же и для того, чтобы пользователь при желании сам мог получить для себя необходимые и удобные характеристики поведения вертолета, что ИМХО хорошо. Ведь модели все разные, весовые, мощностные характеристики, обороты могут сильно отличаться. Сервоприводы АП так-же разные, общие рекомендации применительно к скорости их отработки:
-медленные сервы на голове - большие значения P, I
-быстрые сервы - меньшие значения.
Теперь разберем, как практически осуществлять настройку параметров PID, так сказать общие рекомендации.
Прежде всего, надо настроить систему на работу с двумя банками данных, в одном будут обычные настройки, в другом- экспериментальные. Переключатся они будут тумблером переключения режимов хвостового гиро, при этом мы теряем режим хвоста Нормал, но кто сейчас им пользуется? При желании, после настроек, можно вернуть этот режим назад. Смысл заключается в том, что при облете могут возникнуть автоколебания, при этом посадить вертолет будет очень проблемно, уж поверьте мне. А так мы щелчком тумблера включаем банк со старыми настройками, после чего безопасно приземляемся.
Примерный алгоритм подборки параметров следующий:
- Настройка начинается с параметра P. Необходимо его постепенно увеличивать до появления колебаний. После появления колебаний немного уменьшить P (на 5 единиц). В дальнейшем при выполнении переворотов, бочек при появлении звука срыва потока на лопастях ещё уменьшить P.
- Настройка параметра I выполняется при выполнении пируэтов при быстром полёте вперёд. Если скорость выполнения пируэта равномерна, настройка завершена.
- Если при уже установленных параметрах P и I вертолёт немного подергивает по элеватору, необходимо немного увеличить Pitch D.
При возникновении автоколебаний ротора:
- Быстрые колебания – завышено P,
- Медленные колебания – завышено I.
Настройки рекомендуется производить грубо с шагом 5 единиц, затем более точно 1-2 единицы.
Перевёл инструкцию на Helicox TG-1. Один в один подходит и для ALZRC 3GYS.
Скачать можно тут. Пользуйтесь на здоровье.
Пошаговая инструкция по настройке системы трёхосевого гироскопа Tarot ZYX и CX-3X1000.
Общие рекомендации.
При входе в системное меню или меню настройки вы увидите что все три светодиода мигают одновременно, но не спешите отпускать стик. Подождите пока три светодиода будут быстро последовательно перемигиваться. Только после этого нажмите кнопку Set для входа в меню.
У вас есть около 4 секунд, чтобы включить питание а затем, удерживать либо стик элерона либо стик руля в одной из крайних позиций для входа в одно из двух меню.
Вход в системное меню.
Включите питание,
красный желтый и синий светодиоды засветятся одновременно
Отклоните полностью вправо стик элеронов
Когда красный желтый и синий светодиоды начнут последовательно перемигиваться
возвращайте стик элеронов к центру.
Светодиоды потухнут,
нажмите кнопку Set.
Красный желтый синий светодиоды мигают один раз (указывая на функцию 1, ориентация монтажа устройства на вертолёте)
желтый мигает один раз (Позиция1)
Важное примечание, когда вы нажимаете кнопку Set, если устройство занято, то оно не может видеть как вы нажимаете на кнопку. Нужно нажимать её в промежутке между вспышками.
Так же после изменения значения в меню, необходимо для успешного сохранения изменений перейти к следующей функции, прежде чем отключить питание. Тогда ваши настройки будут сохранены после отключения питания прибора. Если вы нажмете кнопку Set, но прибор занят и вы не перешли к следующей функции, то ваши изменения теряются, если вы отключите питание.
Выход из системного меню или меню установок производится выключением питания.
Как и в любой flybarless системе, если вы хотите проверить, шаг, то вы должны отключить контур гироскопов. Для этого просто войдите в системное меню. Вам не нужно нажимать кнопку Set, чтобы добраться до первой функции. Просто войдите в системное меню и контур гироскопов будет отключен.
Перед тем как войти в меню настроек, проверьте все три направления отработки гироскопов. Как только вы войдёте в меню контуры управления будут отключены. Поэтому лучше заранее знать, какой канал гироскопа необходимо реверснуть, когда вы доберётесь до функции 5.
Ещё совет, для удобства установки функции 3 меню настройки, установите в передатчике вашу кривую шага 0,50,50,50,100. Причина в том, что вы используете отклонение стика руддера для настройки триммеров серв автомата перекоса и трудно двигать руддер и сохранить стик коллективного шага точно в середине. Не забудьте правильно перенастроить кривую шага перед вылетом. Так же очень рекомендую на этом шаге настройки использовать левелер для точной настройки положения тарелки АП.
Пошаговая инструкция по настройке:
- Подключите ZYX к приемнику, но не подключайте серво прямо сейчас. Также, если это электрический вертолёт устраните возможности запуска двигателя в то время как вы делаете настройки. Можно отключить провода регулятора от двигателя или отвести двигатель от главной шестерни. Лично я для настройки использую отдельный блок питания, подсоединив его в свободный разъём приемника.
- Установите в аппаратуре тип автомата перекоса- механический микшер (Heli1). Установите все триммеры и сабтриммеры в 0, все серво конечные точки в 100/100, и двойные расходы 100%. Установите настройки чувствительности хвостового гироскопа. Установите кривую коллективного шага 0,50,50,100.
- Включите приемник и отклоните стик элеронов до упора вправо, пока красный, желтый и синий светодиоды не начнут перемигиваться циклически. Верните стик элеронов к центру. Нажмите кнопку Set на устройстве. Красный, желтый и синий светодиоды будет мигать одновременно один раз, указав что вы вошли в функцию 1. Продолжайте нажимать Set, пока вы не войдёте в функцию 6 (Сброс данных). Перемещайте стик элерона полностью влево, а затем полностью вправо, и вы увидите синие вспышки светодиода. Это указывает на то, что настройки были сброшены к заводским установкам (дефолт).
- Нажмите кнопку Set, чтобы добраться до функции 1 (ориентация гироскопа). Используйте стик элеронов, чтобы выбрать правильное направление ориентации в соответствии с рисунком.
Ориентация 1
Ориентация 2
Ориентация 3 - Нажмите кнопку Set, чтобы сохранить настройки и перейти к функции 2 (стиль полёта). Выберите 3D режим.
- Нажмите кнопку Set, чтобы сохранить настройки и перейти к функции 3 (тип серв). Выберите настройку в соответствии с вашим типом сервоприводов.
- Нажмите кнопку Set, чтобы сохранить настройки и перейти к функции 4 (выбор типа автомата перекоса). Выберите настройку в соответствии с вашим типом автомата перекоса.
- Нажмите Set для сохранения настроек, затем выключите приемник.
- Подключите серво к устройству.
- Убедитесь, что переключатель Hold включен и кривая шага в этом режиме установлена 0,50,50,50,100. Переведите стик газа в середину.
- В этот момент сервоприводы должны быть подключены к устройству, но качалки не установлены.
- Включите приемник и отклоните стик руля полностью влево, пока красный, желтый и синий светодиоды не станут циклически перемигиваться. Верните стик руля в центр.
- Нажмите кнопку Set входа в функцию 1, затем нажмите кнопку Set еще раз, чтобы добраться до функции 2 (реверс серво).
- Снова убедитесь, что ручка газа находится в середине и установить качалки серво как можно ближе к 90 градусов.
- Переместите стик газа вверх и добейтесь, чтобы все три сервомашинки двигались в правильном направлении, и тарелка автомата перекоса двигалась горизонтально. Для этого выбирайте нужный канал с помощью стика элеронов, и используйте стик руля, чтобы изменить направление отработки.
16 Находясь в функции 2 также проверьте направление отработки серво хвоста и измените его, если необходимо. На большинстве вертолетов при перемещении стика руля вправо слайдер ХВ будет двигаться влево. - Нажмите кнопку Set для входа в функцию 3 (Servo Trim). Переместите ручку газа обратно в середину. Если какая-либо качалка серво не 90 градусов, то вы можете использовать Servo Trim, чтобы настроить его. Обратите внимание, что при перемещении элеронов для переключения между каналами сервоприводов, выбранная серво сделает быстрое движение, чтобы вы знали, какой канал вы собираетесь изменить. Используйте стик руля для установки качалок серво на 90 градусов. Сделайте это для всех четырех сервоприводов.
- Если у вас не установлены линки от сервоприводов к тарелке АП, то сделайте это сейчас.
- Настройте линки от сервоприводов к тарелке автомата перекоса, так чтобы тарелка автомата перекоса стояла горизонтально. Желательно для этого использовать левеллер.
- Нажмите Set для сохранения настроек, затем выключите приемник.
- Включите приемник и дождитесь инициализации гироскопа.
- Переместите стик газа вверх. Тарелке АП тоже поднялась вверх? Если нет, то идите в меню настроек вашего передатчика и включите реверс канал Pitch.
- Переместите стик элеватора вперед. Тарелке АП тоже наклонилась вперёд? Если нет, то включите реверс канала Ele в вашем передатчике.
- Переместите стик элеронов вправо. Тарелке АП тоже наклонилась? Если нет, то включите реверс канала Ail в вашем передатчике.
- Установите переключатель режимов гироскопа в положение удержания хвоста. Посмотрите каким цветом светится светодиод на гироскопе. Это непрерывный красный? Если нет, то включите реверс канала чувствительности гироскопа в вашем передатчике.
- Убедитесь, что теперь все серво двигаються в правильном направлении.
- Проверьте отработку каналов гироскопа по направлениям. Наклоните вертолёт носом вниз и обратите внимание, отклоняется ли тарелка автомата перекоса назад. Наклоните вертолёт вправо и обратите внимание, отклоняется ли тарелка автомата перекоса влево. Поверните вертолёт носом влево и проверьте отработку хвостовой серво. На большинстве вертолетов это должно вызывать перемещение слайдера ХВ влево .
- Установите переключатель режимов гироскопа в положение Normal. Качалка сервопривода руля должна быть 90 градусов по отношению к балке хвоста. И длина тяги должна быть отрегулирована таким образом чтобы рычаг слайдера был под углом 90 градусов по отношению к оси ХР.
- Установите переключатель режимов гироскопа обратно в режим HH.
- Выключите приемник, затем обратно включите и переместите стик руля полностью влево.
- Перейдите к функции 4 (Servo Limit). Хвостовая серво будет двигаться в одну сторону. Используйте стик руля и медленно передвигайте слайдер ХР до упора. Используйте стик элерона для перемещения руля на другую конечную точку. Установите и эту конечную точку с помощью стика руля .
Значения лимитов по элерону и элеватору я рекомендую оставить по умолчанию, если это не вызывает касания качалками элементов конструкции вертолёта в крайних точках.
Для уменьшения чувствительности по циклическим шагам вы можете использовать двойные расходы в передатчике по каналам элерона и элеватора. - Нажмите Set, чтобы добраться до реверса гироскопов (функции 5). На шаге 27 вы должны уже были определить, нуждается ли какой либо из гироскопов в изменении направления отработки. Здесь вы должны исправить это.
- Нажмите Set, чтобы добраться до настройки диапазона коллективного шага (функция 6). Этот параметр настраивает общий коллективный диапазон, в отличие от настройки в системе Beast-X где вы настраиваете диапазоны коллективного шага отдельно для положительных и отрицательных шагов.
Просто переместите стик газа до упора вверх и, используя угломер, установите с помощью стика руля положительный коллективный шаг точно на 12 градусов.
Затем установив стик газа до упора вниз проверьте отрицательный коллективный шаг, что он также 12 градусов, и если нет, настройте обе тяги цапф до равенства коллективных диапазонов.
Позже, если вы захотите уменьшить значения коллективного шага, то вы сможете это сделать с помощью кривой шага в передатчике, уменьшив верхний диапазон менее 100% для для уменьшения значения положительного шага или увеличив нижний диапазон более 0 для уменьшения значения отрицательного шага. - Нажмите Set, чтобы добраться до установки микшера хвост-газ (функция 7). На небольших электровертолётах этот параметр можно оставить равным нулю.
- Нажмите Set для сохранения настроек затем выключите приемник.
- Включите приемник и отклоните стик элеронов полностью вправо, чтобы войти в системное меню.
- Используйте кнопку Set, чтобы перейти к функции 5 (оптимизация пируэта). Тарелка автомата перекоса наклонится. Просто для иллюстрации, например тарелка автомата перекоса наклонена в сторону входной двери. Поверните вертолет вокруг вертикальной оси и если автомат перекоса движется так, что он по-прежнему наклонен в сторону входной двери, то оптимизация пируэта настроена в правильном направлении. Если нет, то используйте стик элеронов, чтобы изменить его. У вас есть только 40 секунд на определение верности настройки, после чего тарелка вернётся в прежнее положение, и придётся нажимать 6 раз кнопку Set чтобы опять инициализировать проверку. Затем не забудьте нажать кнопку Set для сохранения настройки. Выключите питание приёмника
- Установите кривые шага в передатчике опять в дефолтные установки 0,25,50,75,100.
- Проверьте еще раз, что все элементы управления двигаются в правильном направлении и что гироскопы адекватно реагируют на изменение положения модели в пространстве.
- Для настройки кривых шага на требуемый диапазон для каждого режима полета, необходимо отключить гироскопа контуры управления. Для этого просто войдите в системное меню. Вам не нужно нажимать кнопку Set, чтобы добраться до первой функции. Просто войдите в системное меню и контуры управления будут отключены…
◆ После включении питания, гироскопу требуется несколько секунд для инициализации. Во время инициализации, красный и синий светодиоды синхронно мигают. После завершения инициализации, хвостовой сервопривод будет двигаться вправо, а затем налево, что указывает на нормально прошедший процесс инициализации.
◆ Если вертолёт не стоит неподвижно или стики перемещались во время инициализации, гироскоп может иметь дрейф. Не прикасаясь к стикам, быстро переключитесь несколько раз между режимом удержания и нормальным, гироскоп переинициализируется и устранит дрейф.
◆ Перед каждым полетом убедитесь, что детали рамы и роторов вертолета находятся в хорошем механическом состоянии.
◆При настройке с помощью передатчика мы не имеем возможность загрузить предустановленые пресеты моделей. Для первых полётов я бы порекомендовал установить двойные расходы около 50-60 для снижения чувствительности по циклическим шагам. Потом увеличить по вкусу. После раскрутки ротора понаблюдайте, не раскачивается ли тарелка по элеватору или элеронам. Если подобное явление имеет место, необходимо немного понизить чувствительность гироскопов (пункт 1 roll gain и pitch gain в меню установок). Обычно в электровертолете 450-го класса до 33 едениц.
Решил попробовать написать что-то в дневник для тренировки, так сказать. Скоро буду выкладывать сюда мануальчики по настройке китайских трёхосевых гироскопов…😉