Пока писал, образовалось много букв, так что, вкратце, речь пойдет о следующем:
— Что нужно сделать сразу после покупки Walkera 350 pro?
— Как удобно управлять автомиссиями?
— Как поставить телеметрийный радиомодем?
— Как перейти на управление по FrSky и зачем это нужно?
— Как подключить OSD и видеолинк?
— Что еще можно сделать и почему?
Со временем, картинки потерялись из поста. Кому будет лениво дальше читать, то суть-схема доработки и картинки тут yadi.sk/d/VaKlhJ7Z3JMz6w
Итак, к вам приехал комплект Walkera 350 Pro в стандартной комплектации с подвесом G-2D и пультом Devo F7. В принципе, это довольно неплохой и симпатичный коптер 350-го класса с некоторым количеством детских болезней которые можно легко побороть. Уже после нескольких полетов становится понятно, что запускать все это хозяйство в стоковой комплектации становится довольно скучно. Да, это летает, но недалеко и не всегда надежно. Судя по информации пилотов с ветки rcopen.com/forum/f135/topic361315 у кого не летает вовсе, кто-то запускал автомиссии в облака, а кто-то покупает уже четвертый по причине улета предыдущих и прочее и прочее… Лично мне пришлось здорово повозиться с настройками компаса и тонкостями его калибровки на контроллере devo-m которые подробно описал тут. Выкуривать всю ветку по прошке уже после 100-ой страницы довольно напряжно, поэтому я решил собрать наиболее важные, по моему мнению, доработки и ссылки в этом посте.
Теперь по порядку:
Чтобы как минимум летало и не падало, весьма желательно ознакомиться с материалом в ВИКИ по Walkera 350 Pro и Devo-M Ardupilot. Также рекомендуется сделать полезные настройки на пульте Devo F7. Компас калибровать только на улице. От калибровки сведением стиков я давно отказался и делаю это исключительно в МП при установленном параметре COMPASS_LEARN=1. Пока не установлен модем, калибровать компас придется ловкостью рук начиная с 18:10 на длинном USB шнурке. С подвесом G-2D отдельная песня — я так и не смог его настроить и, в итоге, продал на запчасти.
Коптер надо разобрать, проверить качество пайки и обработать абсолютно всю электронику, включая приемник, лаком типа Plastic Cramolin в несколько слоев у кого как хватит терпения. Контроллер devo-m снять, заклеить на нем скотчем дырочки барометра и обработать лаком тоже. После высыхания скотч снять. Лак предохранит электронику от повышенной влажности в атмосфере.
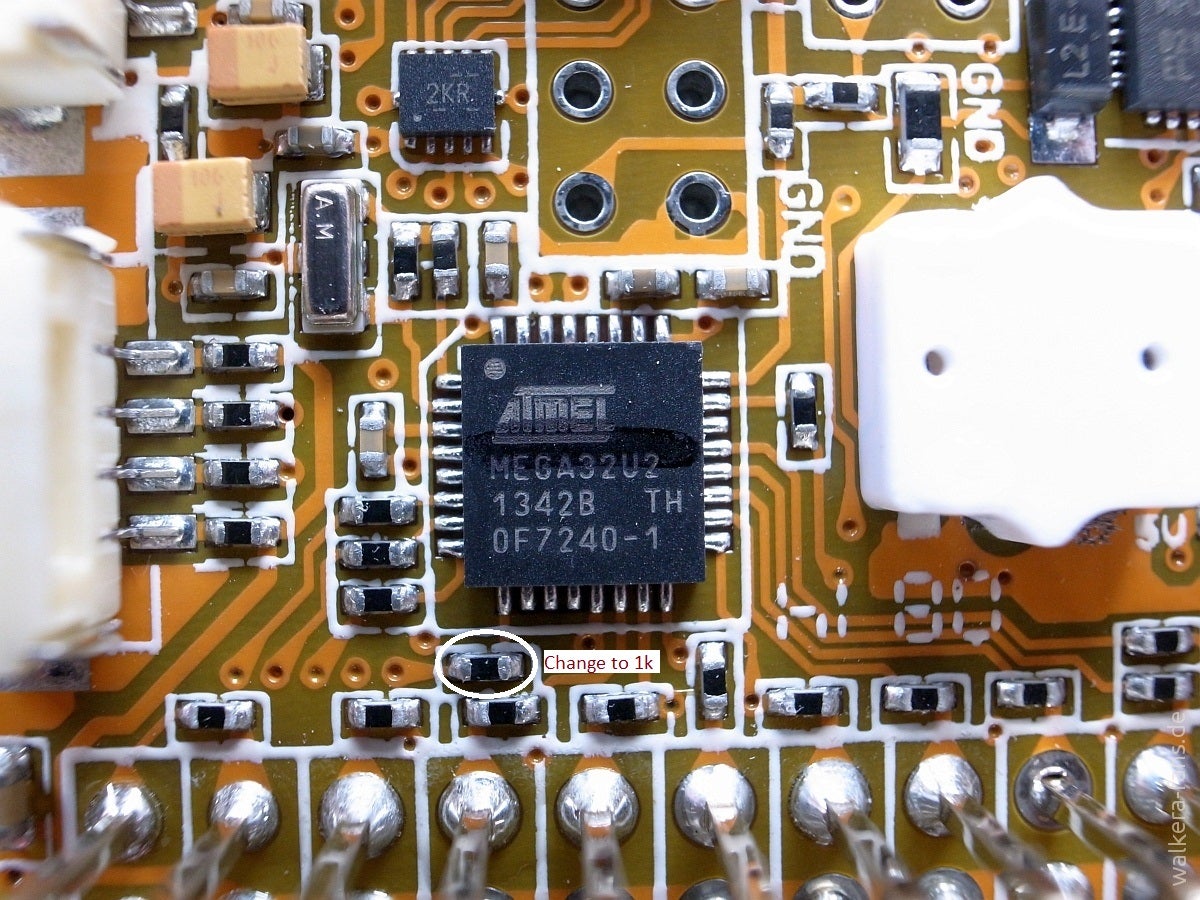
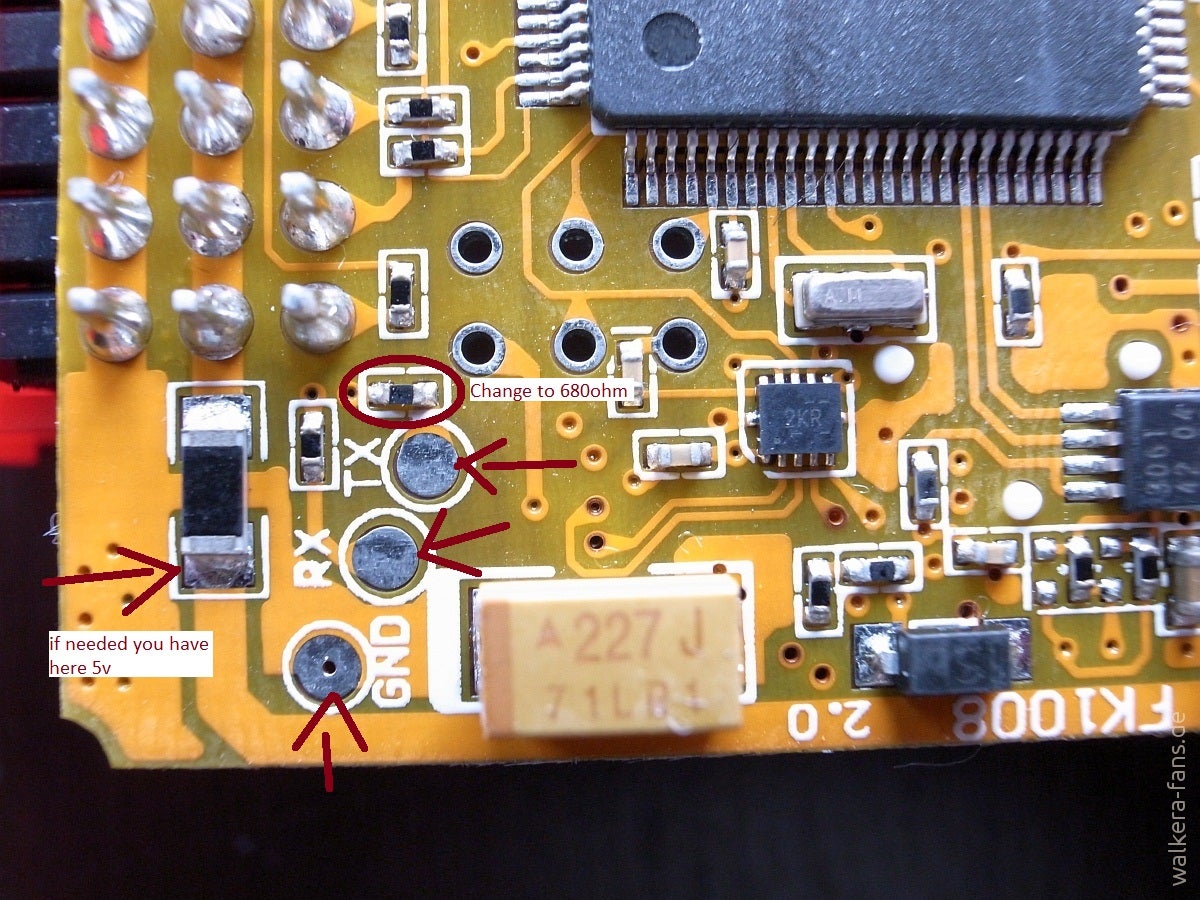
Как летать автомиссии довольно подробно описано в дневнике у NARAJANA. Миссии можно планировать и загружать с помощью шнурочка по USB, но, чтобы внести изменения, надо коптер сажать и перезагружать ее заново через тот же шнурок. Это весьма неудобно, также как и таскать ноут с собой в полет, поэтому лучше подключить 3DR модем и управлять им с планшета через OTG разъем. Я поставил вот такой с Банга в коробочках на 915. Есть инфа, что на эту частоту они запрещены, но если в дальнейшем летать по LRS 433, то модем на 433 точно не подойдет. Тут уж личное дело каждого. Чтобы модем заработал, необходимо обязательнопоменять на контроллере devo-m два резистора 680 и 1к 0402 размера. Их можно поискать или на старой материнке или в не рабочем мобильнике. Процесс замены таких мелких резисторов весьма нетривиален. Если у вас нет опыта пайки лучше обратитесь к знакомому электронщику с микроскопом или в специализированную мастерскую по ремонту мобильников. Поверьте, выйдет дешевле, так как новый контроллер Devo-M стоит от 120уе плюс доставка, в зависимости от аппетитов продавца.
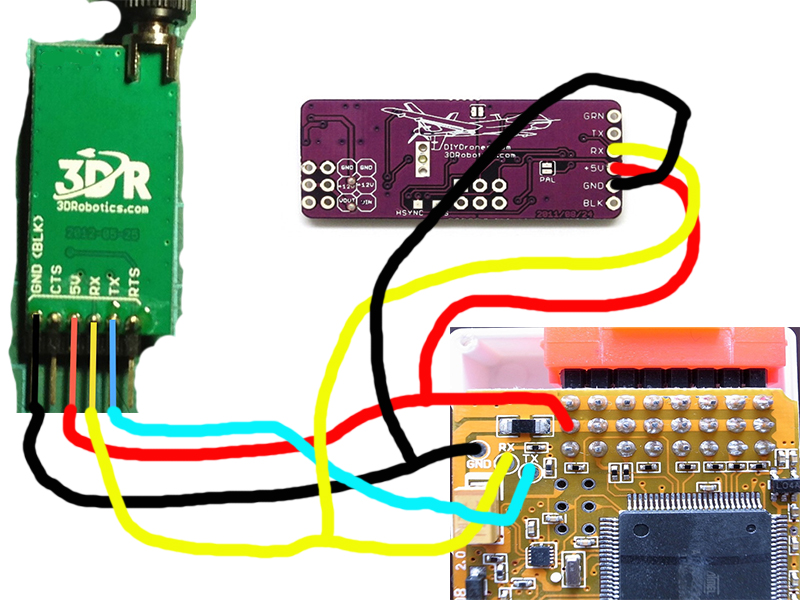
По непонятной причине контакты RX и TX на контроллере называются не по логике подключения RX to TX. На это надо буквально забить и подключать как на картинке. Кстати, модем приезжает с проводами точно в цвет означенного подключения.
Модем лучше разместить сбоку либо перепаяв родной разъем на угловой SMA, либо через угловой переходник.
При вертикально ориентированных антеннах на земле и на борту он обеспечивает связь на расстоянии от 600 до 800 метров. Теперь можно с помощью программы Droid Planner управлять автомиссиями через закрепленный на аппаруре планшет.
Как управлять автомиссиями с планшета очень хорошо показано на видео от Юлиана. Кроме того, с помощью модема значительно удобнее калибровать компас, работать с программой Mission Planner и находить улетевший аппарат. Необходимо помнить, что RSSI на планшете отображает не качество канала управления, а качество связи между модемами.
В принципе, для FPV полетов подвес вообще не нужен. Родная камера iLook с передатчиком обеспечит видеолинк на расстоянии до 300-500 метров и быстро надоест. Чтобы нормально летать по камере, необходимо иметь информацию RSSI о качестве сигнала между приемником и передатчиком в аппаратуре. С родного приемника RX703 RSSI взять неоткуда, поэтому, желательно полностью переделать ВЧ тракт 2.4, в аппаратуру Devo F7 поставить DHT модуль от FrSky, а на борт поставить приемник D8R-XP. Кроме того, штатный приемник RX703 имеет особенность не восстанавливать управление после потери связи до полного RTL средствами контроллера, да и протокол devo не торт. В общем, переход на FrSky во всех смыслах рекомендуется.
Приемник D8R-XP замечательно встает на штатное место если снизу немного подкусить ребра жесткости внутри рамы коптера. Имеется довольно толковая инструкция с rcgroups по подключению D8R-XP в Walkera 350 Pro и оригинальная документация FrSky к приемнику D8R-XP. В приемнике необходимо замкнуть 3 и 4 сигнальные пины, после чего он одним проводом подключается по CPPM в разъем DATABUS контроллера Devo-M вместо родного RX703.
При большом желании можно подключить на A2 приемника voltage sensor на резисторах для контроля бортового напряжения по телеметрии FrSky, но я этого не делал, поскольку напряжение прекрасно видно либо через планшет, либо через OSD по протоколу MavLink. Если делитель подключен, то напряжение борта можно контролировать через отдельный экранчик FrSky, который подключается в разъем модуля DHT. На нем же будет отображаться важный параметр RSSI качества канала управления. Без экранчика модуль DHT будет просто пищать зуммером при малом RSSI.
Теперь можно приступить к установке OSD. Подойдет любая MinimOSD. На ней надо запаять две перемычки и подавать питание только 5V. OSD будет работать и без перепаянных резисторов на контроллере.
Далее прошиваем OSD прошивкой MinimOSDExtra_Copter_Prerelease_2.4_r789. Заливаем шрифты из файла .mcm которые понравятся. Делаем настройки для OSD в Mission Planner. Подключаем к контроллеру только RX и настраиваем экран вывода параметров. Подробнее про прошивку и настройку OSD также можно посмотреть на видео у Юлиана. Информация о напряжении питания борта и RSSI будет передаваться с контроллера в OSD по протоколу MavLink, но для вывода RSSI на экран OSD необходимо завести PWM RSSI приемника через RC фильтр на 95 ногу контроллера Devo-M и включить RSSI в МП: RSSI_PIN=2, RSSI_RANGE=3,3. По ходу экспериментов и ошибочных подключений я убил этот порт на контроллере и пришлось заводить RSSI на 97 ногу и переключать параметр на RSSI_PIN=0. Так что осторожно! Кстати, пайка на ногу контроллера также требует весьма продвинутых скилов в этом направлении, как и замена резисторов для модема. Можно подпаяться на ногу маленьким проводочком с волос и от него уже делать вывод. Место пайки желательно залить жидкой изолентой типа Performix Liquid Tape или Plastic 71.
В настройках OSD у меня стоит MAX RSSI 255 и показывает уровень 94-95%. Можно поставить 245, тогда на экране будет 99-100%. Минимальный RSSI = 50. Калибровкой через Enable RAW не пользовался. На сам экран параметров выводят кому что удобно: таймер, спутники, горизонт, напряжение борта, rssi и полетные режимы. Переключение режимов OSD на экране у меня выведено на Channel7=Переключатель GEAR. Также оказалось удобно не делать выноску на проводах из контроллера, а использовать штатные пины на неиспользуемых контактах моторов 6,7 и 8. Жалеть особо нечего, так как вероятность установки этого контроллера на восьмимоторный коптер равна нулю. Надо подрезать контактные площадки на плате, завести на не обозначенный M6 RX, на M7 TX и на M8 RSSI с ножки контроллера. Далее эти контакты подписать на корпусе и подключаться к ним обычными модельными джамперами с сигналом, 5V и GND.
Собственно все. После этих нехитрых доработок Walkera 350 pro вполне может использоваться для автомиссий и дальних FPV полетов. Я сознательно не рассматривал возможность сноса контроллера devo-m и установки вместо оного, например miniAPM. Просится конечно. Даже из-за того, что в devo-m нет полетных логов и отсутствует программный файлсев, но тогда это будет уже коптер с совсем другим сердцем. Оставлю его как есть — в конце концов меньше телодвижений с паяльником и не хочется расставаться с родными светодиодами арминга и контроля GPS. В качестве видеопередатчика можно использовать любой совместимый по частоте с Devo F7 по всему второму каналу FR2 5733,5752,5771,5790,5809,5828,5847,5866, например всем известный noname TS832 (ни разу не Боскам — в интернетах все врут) или оригинальный Boscam на 600 mw. Кстати, у последнего разъем один в один как у контроллера Devo-M. Даташит.
p.s. Один важный момент. Необходимо организовать питание видеолинка и камеры через отдельный Step Down с напряжением 8V (так помех меньше) и питание OSD также подключить отдельно. В обоих случаях подойдет вот такой с Банга. OSD будет работать и от штатного питания по схеме выше, но с учетом его капризности и частоты выгорания лучше обезопасить остальную электронику. Пока шаманил с подключениями, ошибся и столкнулся с волшебным синим дымом. В результате минус OSD, минус мелкий Фатшарк 600 на 5V, минус видеопередатчик и модем, минус порт на контроллере и потеря времени. Так что запрягайте сразу правильно и внимательно подключайте разъемы JST — они втыкаются легко наоборот.
default_X350_Pro1.0.bin.param (файл параметров, с которыми летает идеально)
X350_Pro1.0.bin (прошивка Walkera 350 Pro 1.0)
upgrade quide.pdf (инструкция по прошивке)
SerialAngel.exe (программа для прошивки)
Original Config X350_Pro1.0.bin (для исправления номера прошивки при откате со старших версий и после setup erase в терминале)
Если после манипуляций с прошивками и команды setup erase перестали сохраняться параметры контроллера в Mission Planner, то файл Original Config X350_Pro1.0.bin необходимо записать в контроллер через закладу Config программы SerialAngel.exe. И все опять будет сохраняться.
upd3: Walkera QR-X350Pro-недокументированные возможности и апгрейды. Группа для обсуждения без флуда. Причина создания группы — не редактируемая шапка профильной темы на форуме, в которой уже после 100-й страницы что-либо найти трудно, а после 200-й вообще не реально.
upd5: Таблица совместимости частот передатчиков и приемника видео devo F7 от WhiteWind.
upd6: Заливка прошивки Ардукоптера в devo-m без смены загрузчика при помощи Walkera decode.exe. Подробнее тут. Соответственно сохраняется возможность вернуть родную прошивку Валкеры. Готовая прошивка на сайте Алексея Козина AC_32_wogimbal_v2_DEVOM_WALKERA_x350_Pro.bin.rar !!!Внимание прошивка работает с родным загрузчиком Devo-M и не подходит для контроллера APM!!! Приобретаем все плюшки и преимущества APM, например, логи, но теряем родные светодиоды арминга и GPS.
Вроде все это читал в ветке, но вот когда все в куче расписано, выглядит как свежее, интересно было читать.
Единственно наверно не хватает рисунка, где подключено 3DR модем и OSD вместе к контролеру.
Ок! Пожалуй это одна из самых нужных картинок. Добавил.
Еще один момент, пишете что — третий, отдельно на OSD 4.95V. Я сам смутно понимаю как реализовать питание OSD и 3DR модема, как понимаю их лучше запитать отдельно от контролера? Может накидаете общий рисунок с питанием? На рисунках модем и телеметрия по питанию подключены к контролеру.
День добрый, а принципиальной схемы случайно на ДЕВО-М нету? А то глючит гироскоп и никак не могу его побороть!
День добрый, а принципиальной схемы случайно на ДЕВО-М нету? А то глючит гироскоп и никак не могу его побороть!
На Devo-M нет, но на APM 2.5 вот тут i.imgur.com/hZ5XlJS.png. Глубоко не разбирался, но они не должны сильно отличаться. Разве что портами.
Спасибо большое, попробую сравнить!
Евгений, большое спасибо за ваш труд!
Добавил тезисно в FAQ вики в виде списка todo со ссылками на соответствующие разделы.
отличная статья. заставила задуматься над апгрейдом)))
дальность управления на модулях FrSky не тестилась? насколько в плюс ушла? если проверяли, то в каких условиях? поле, лес, город…
интересует дальность без всяких бустеров и на родных сосисках, для статистики так сказать)
дальность управления на модулях FrSky не тестилась? насколько в плюс ушла? если проверяли, то в каких условиях? поле, лес, город…
интересует дальность без всяких бустеров и на родных сосисках, для статистики так сказать)
Евгений мне посоветовали обратится к вам я новичок у меня Walkera 350PRO пульт DEVO F7 покупал отдельно в режиме лоитер (GPS режим) висит не хочет лететь в перед назад лева права только крутится по оси и может верх низ подскажите пожалуйста как настроить (может есть видео с настройками?) .
Евгений установил телеметрию как показано у вас установил Tower (DroidPlanner 3) вся информация отражается на планшете планшет всё видит но режимы от планшета не включаются подскажите может нужна прошивка если да то где можно скачать и посмотреть видео. Заранее спасибо.
Добрый день!
Прошу не кидать в меня сильно помидорами за мои вопросы, т.к начинающий и хочу сына тоже приучить к этому делу. Заказал свой первый квадрик Walkera 350 Pro с Devo 7 FPV, камерой Ilook. Я хочу его немножко доработать что бы летать миссии по планшету. Скажите, если я правильно понял, то нужен модем и перепайка 2х резисторов? На данной картинке подключение модема, но вот что за плата на которой еще нарисован самолет я не понял. Что это за модуль? Если я возьму модем на 433Mhz то резисторы так же надо перепаивать или нет?
Плата с самолетом это плата OSD это если объяснить по простому плата контроля параметров каптера она выводит на дисплей нужные вам параметры вот видео
Плата с самолетом это плата OSD это если объяснить по простому плата контроля параметров каптера она выводит на дисплей нужные вам параметры вот видео
Спасибо. А резисторы перепаивать надо если на 433Mгц возьму модем?
Если я возьму модем на 433Mhz то резисторы так же надо перепаивать или нет?
Да, также надо будет перепаивать. Он отличается от модема на 915 только частотой и антеннами. Можно поискать его и дешевле, чем по моей ссылке. На форуме, также, есть специализированная ветка по модемам rcopen.com/forum/f123/topic287932
Да, также надо будет перепаивать. Он отличается от модема на 915 только частотой и антеннами. Можно поискать его и дешевле, чем по моей ссылке. На форуме, также, есть специализированная ветка по модемам rcopen.com/forum/f123/topic287932
Евгений, спасибо Вам за ответ. Уже белиемение стало понятно какой функционал мне нужен от квадрика. Как придет Walkera постараюсь выложить обзор т.к квадрик достался по ОООООЧЕНЬ привлекательной цене, с адекватным продавцом.
Подскажите, подсоединяю ВАЛЬКУ к компьютеру, моргает левый светодиод а реакции ноль. Батарею к коптеру не подключал. Может надо какие то дрова установить?
Подскажите, подсоединяю ВАЛЬКУ к компьютеру, моргает левый светодиод а реакции ноль. Батарею к коптеру не подключал. Может надо какие то дрова установить?
У меня без включенного и привязанного пульта так же не было реакции.
У меня без включенного и привязанного пульта так же не было реакции.
Можете поподробнее описать как это сделать? А то я в этом деле еще не очень. Батарея для ВАЛЬКИ пришла, а вот для пульта должна вот вот подойти.
Можете поподробнее описать как это сделать? А то я в этом деле еще не очень. Батарея для ВАЛЬКИ пришла, а вот для пульта должна вот вот подойти.
Да я сам начинающий в этом деле. Включаете пульт, потом сразу шнурок в USB, через некоторое время (секунд 30) соединение будет доступно.
Друзья! А подключение MinimOSD k ILook по такой же схеме? Пока хочу что бы на пульте вся информация была.
в тексте опечатка “необходимо обязательно поменять на контроллере devo-m два резистора 680 и 1к 0805 размера”
поправьте так “необходимо обязательно поменять на контроллере devo-m два резистора 680 и 1к 0402 размера”
0805 это ооочень большой размер
680 и 1к 0402 размера. 0805 это ооочень большой размер
Спасибо! Поправил.
Спасибо за статью! Собираюсь купить PNF-версию. Скажите, а такой передатчик-приемник можно будет втулить? www.hobbyking.com/hobbyking/…/uh_viewitem.asp?idpr…
Имею в виду по размеру и возможности подключить по одному проводу приемник.
Если нет, то подскажите тогда пожалуйста, какой модуль передатчика лучше взять к реккомендованому вами D8R-XP?
Для одного провода D8R-II перешивается в XP. Поиском можно найти много ссылок. Но можно не заморачиваться и подключить тремя трехконтактными джамперами — один вертикально (sig, питание, земля), а два других по горизонтали только в сигналы. А передатчик надо брать по разъему в аппаратуре сзади: либо DJT либо DFT. В DEVO F7 такого разъема нет, поэтому DHT встраивался внутрь по PPM.
Сейчас на Hobbyking приемник FlySky X8R с S.Bus есть по 1500 р., с российского склада (+доставка рублей 350 курьером). А вч-модуль FrSky DJT с разъемом JR по цене лучше всего на Banggood - 2200 р. с доставкой Airmail Registered, с кодом cupo6bg (-7%). В итоге в 4000 р.
Долго думал, может, взять на Хоббикинге комбонабор FrSky без телеметрии на приемнике - 3400 будет с доставкой, или комбо с телеметрией, но приемник D8R, а не X8R - этот тоже в 4000 обойдется с доставкой.
Те же деньги, но X8R вроде посерьезнее приемник. А что значит “для одного провода прошивается” - я не понял, но в любом случае это еще, скорее всего, нужно иметь USB-UART.
В итоге нашел на Banggood вч-модуль XJT, с купоном и со страховкой доставки он обошелся в 3083 рубля, а приемник X8R с курьерской доставкой - 1780 р. Итого 4850 р. за комплект FrSky XJT rx/tx (100mW), у того же Hobbyking он встанет в 5500 с доставкой, если подождать спецпредложения.
{"assets_hash":"a8b26fa7f6e768b07a72c8c9aadb9422","page_data":{"users":{"3e71bd093df95500777968ea":{"_id":"3e71bd093df95500777968ea","hid":1453,"name":"NetWood","nick":"NetWood","avatar_id":null,"css":""},"42c95bd33df9550077790330":{"_id":"42c95bd33df9550077790330","hid":8039,"name":"Jager","nick":"Jager","avatar_id":null,"css":""},"4cc71da73df955007775ab86":{"_id":"4cc71da73df955007775ab86","hid":73930,"name":"Маныч","nick":"Маныч","avatar_id":null,"css":""},"4e71d4e23df955007774e5d8":{"_id":"4e71d4e23df955007774e5d8","hid":99365,"name":"alexeykozin","nick":"alexeykozin","avatar_id":null,"css":""},"52ea911c3df955007772cb6d":{"_id":"52ea911c3df955007772cb6d","hid":194590,"name":"Adjam","nick":"Adjam","avatar_id":null,"css":""},"53d165bb3df95500777270ea":{"_id":"53d165bb3df95500777270ea","hid":205360,"name":"Вадимм","nick":"Вадимм","avatar_id":null,"css":""},"54947ec43df95500777228e1":{"_id":"54947ec43df95500777228e1","hid":213493,"name":"Cap13","nick":"Cap13","avatar_id":null,"css":""},"54c9ec7c3df955007772115f":{"_id":"54c9ec7c3df955007772115f","hid":217513,"name":"ybynty","nick":"ybynty","avatar_id":null,"css":""},"554509763df955007771dd4a":{"_id":"554509763df955007771dd4a","hid":222961,"name":"igorshiling","nick":"igorshiling","avatar_id":null,"css":""},"5558dcc03df955007771d507":{"_id":"5558dcc03df955007771d507","hid":223785,"name":"Aximixa","nick":"Aximixa","avatar_id":null,"css":""},"55b8b1eb3df955007771b094":{"_id":"55b8b1eb3df955007771b094","hid":230254,"name":"CyHDyK","nick":"CyHDyK","avatar_id":null,"css":""}},"settings":{"blogs_can_create":false,"blogs_mod_can_delete":false,"blogs_mod_can_hard_delete":false,"blogs_mod_can_add_infractions":false,"can_report_abuse":false,"can_vote":false,"can_see_ip":false,"blogs_edit_comments_max_time":30,"blogs_show_ignored":false,"blogs_reply_old_comment_threshold":30,"votes_add_max_time":168},"entry":{"_id":"54ecfca299707300771119f9","hid":19993,"title":"Доработка Walkera 350 Pro для автомиссий и FPV","html":"<p><span class=\"image\" style=\"width: 1px\" data-nd-image-orig=\"http://savepic.su/5146247.png\"><img src=\"http://savepic.su/5146247.png\" alt referrerpolicy=\"no-referrer\"><span class=\"image__spacer\" style=\"padding-bottom: 100.0000%\"></span></span><img class=\"image\" data-nd-image-orig=\"https://3.downloader.disk.yandex.ru/preview/b5905731ef603f55b3243bc316a0ad089df9746d1b9e1467e8ae20f4fcdf8aae/inf/qQgo1qDXlcXdJhyx2uh_GJi3mBXtJCYmvKZ8E2_LBpC6g0I4d1dgXuZ35grrEALxLThkaxfatutvm3PUJQCLgw%3D%3D?uid=295672&filename=%D0%B4%D0%BE%D1%80%D0%B0%D0%B1%D0%BE%D1%82%D0%BA%D0%B0W350PRO.png&disposition=inline&hash=&limit=0&content_type=image%2Fpng&tknv=v2&size=1280x829\" src=\"https://3.downloader.disk.yandex.ru/preview/b5905731ef603f55b3243bc316a0ad089df9746d1b9e1467e8ae20f4fcdf8aae/inf/qQgo1qDXlcXdJhyx2uh_GJi3mBXtJCYmvKZ8E2_LBpC6g0I4d1dgXuZ35grrEALxLThkaxfatutvm3PUJQCLgw%3D%3D?uid=295672&filename=%D0%B4%D0%BE%D1%80%D0%B0%D0%B1%D0%BE%D1%82%D0%BA%D0%B0W350PRO.png&disposition=inline&hash=&limit=0&content_type=image%2Fpng&tknv=v2&size=1280x829\" alt referrerpolicy=\"no-referrer\"></p>\n<!--cut-->\n<p>Пока писал, образовалось много букв, так что, вкратце, речь пойдет о следующем:<br>\n— Что нужно сделать сразу после покупки Walkera 350 pro?<br>\n— Как удобно управлять автомиссиями?<br>\n— Как поставить телеметрийный радиомодем?<br>\n— Как перейти на управление по FrSky и зачем это нужно?<br>\n— Как подключить OSD и видеолинк?<br>\n— Что еще можно сделать и почему?</p>\n<p>Со временем, картинки потерялись из поста. Кому будет лениво дальше читать, то суть-схема доработки и картинки тут <a href=\"https://yadi.sk/d/VaKlhJ7Z3JMz6w\" class=\"link link-ext link-auto\" data-nd-link-type=\"autolink\" data-nd-link-orig=\"https://yadi.sk/d/VaKlhJ7Z3JMz6w\" target=\"_blank\" rel=\"nofollow noopener\">yadi.sk/d/VaKlhJ7Z3JMz6w</a></p>\n<p>Итак, к вам приехал комплект <strong data-nd-pair-src=\"**\">Walkera 350 Pro</strong> в стандартной комплектации с подвесом G-2D и пультом Devo F7. В принципе, это довольно неплохой и симпатичный коптер 350-го класса с некоторым количеством детских болезней которые можно легко побороть. Уже после нескольких полетов становится понятно, что запускать все это хозяйство в стоковой комплектации становится довольно скучно. Да, это летает, но недалеко и не всегда надежно. Судя по информации пилотов с ветки <a href=\"https://rcopen.com/forum/f135/topic361315\" class=\"link link-int link-auto\" data-nd-link-type=\"autolink\" data-nd-link-orig=\"https://rcopen.com/forum/f135/topic361315\">rcopen.com/forum/f135/topic361315</a> у кого не летает вовсе, кто-то запускал автомиссии в облака, а кто-то покупает уже четвертый по причине улета предыдущих и прочее и прочее… Лично мне пришлось здорово повозиться с настройками компаса и тонкостями его калибровки на контроллере devo-m которые подробно описал <a href=\"http://multicopterwiki.ru/index.php/Walkera_QR_X350_PRO#.D0.9A.D0.B0.D0.BA_.D0.BF.D1.80.D0.B0.D0.B2.D0.B8.D0.BB.D1.8C.D0.BD.D0.BE_.D0.BA.D0.B0.D0.BB.D0.B8.D0.B1.D1.80.D0.BE.D0.B2.D0.B0.D1.82.D1.8C_.D0.BA.D0.BE.D0.BC.D0.BF.D0.B0.D1.81\" class=\"link link-ext\" data-nd-link-orig=\"http://multicopterwiki.ru/index.php/Walkera_QR_X350_PRO#.D0.9A.D0.B0.D0.BA_.D0.BF.D1.80.D0.B0.D0.B2.D0.B8.D0.BB.D1.8C.D0.BD.D0.BE_.D0.BA.D0.B0.D0.BB.D0.B8.D0.B1.D1.80.D0.BE.D0.B2.D0.B0.D1.82.D1.8C_.D0.BA.D0.BE.D0.BC.D0.BF.D0.B0.D1.81\" target=\"_blank\" rel=\"nofollow noopener\">тут</a>. Выкуривать всю ветку по прошке уже после 100-ой страницы довольно напряжно, поэтому я решил собрать наиболее важные, по моему мнению, доработки и ссылки в этом посте.</p>\n<p>Теперь по порядку:</p>\n<ol>\n<li>\n<p>Чтобы как минимум летало и не падало, весьма желательно ознакомиться с материалом в ВИКИ по <a href=\"http://multicopterwiki.ru/index.php/Walkera_QR_X350_PRO\" class=\"link link-ext\" data-nd-link-orig=\"http://multicopterwiki.ru/index.php/Walkera_QR_X350_PRO\" target=\"_blank\" rel=\"nofollow noopener\">Walkera 350 Pro</a> и <a href=\"http://multicopterwiki.ru/index.php/Walkera_QR_X350_PRO._DEVO-M._ArduPilot#Bluetooth-.D0.BC.D0.BE.D0.B4.D0.B5.D0.BC\" class=\"link link-ext\" data-nd-link-orig=\"http://multicopterwiki.ru/index.php/Walkera_QR_X350_PRO._DEVO-M._ArduPilot#Bluetooth-.D0.BC.D0.BE.D0.B4.D0.B5.D0.BC\" target=\"_blank\" rel=\"nofollow noopener\">Devo-M Ardupilot</a>. Также рекомендуется сделать <a href=\"http://multicopterwiki.ru/index.php/Walkera_QR_X350_PRO._DEVO-M._ArduPilot#.D0.9F.D0.BE.D0.BB.D0.B5.D0.B7.D0.BD.D1.8B.D0.B5_.D0.BD.D0.B0.D1.81.D1.82.D1.80.D0.BE.D0.B9.D0.BA.D0.B8_.D0.B4.D0.BB.D1.8F_.D0.BF.D1.83.D0.BB.D1.8C.D1.82.D0.B0_DEVO_F7\" class=\"link link-ext\" data-nd-link-orig=\"http://multicopterwiki.ru/index.php/Walkera_QR_X350_PRO._DEVO-M._ArduPilot#.D0.9F.D0.BE.D0.BB.D0.B5.D0.B7.D0.BD.D1.8B.D0.B5_.D0.BD.D0.B0.D1.81.D1.82.D1.80.D0.BE.D0.B9.D0.BA.D0.B8_.D0.B4.D0.BB.D1.8F_.D0.BF.D1.83.D0.BB.D1.8C.D1.82.D0.B0_DEVO_F7\" target=\"_blank\" rel=\"nofollow noopener\">полезные настройки на пульте Devo F7</a>. <strong data-nd-pair-src=\"**\">Компас калибровать только на улице</strong>. От калибровки сведением стиков я давно отказался и делаю это исключительно в МП при установленном параметре <strong data-nd-pair-src=\"**\">COMPASS_LEARN=1</strong>. Пока не установлен модем, калибровать компас <a href=\"http://www.youtube.com/watch?v=rqCS6YDE7KI#t=963\" class=\"link link-ext\" data-nd-link-orig=\"http://www.youtube.com/watch?v=rqCS6YDE7KI#t=963\" target=\"_blank\" rel=\"nofollow noopener\">придется ловкостью рук начиная с 18:10</a> на длинном USB шнурке. С подвесом G-2D отдельная песня — я так и не смог его настроить и, в итоге, продал на запчасти.</p>\n</li>\n<li>\n<p>Коптер надо разобрать, проверить качество пайки и обработать <strong data-nd-pair-src=\"**\">абсолютно всю электронику</strong>, включая приемник, лаком типа <a href=\"https://www.google.ru/search?q=Plastic+Cramolin&newwindow=1&source=lnms&tbm=isch&sa=X&ei=xLfsVPPwAoXXyQOv6oDABQ&ved=0CAgQ_AUoAQ&biw=1920&bih=955\" class=\"link link-ext\" data-nd-link-orig=\"https://www.google.ru/search?q=Plastic+Cramolin&newwindow=1&source=lnms&tbm=isch&sa=X&ei=xLfsVPPwAoXXyQOv6oDABQ&ved=0CAgQ_AUoAQ&biw=1920&bih=955\" target=\"_blank\" rel=\"nofollow noopener\">Plastic Cramolin</a> в несколько слоев у кого как хватит терпения. Контроллер devo-m снять, заклеить на нем скотчем дырочки барометра и обработать лаком тоже. После высыхания скотч снять. Лак предохранит электронику от повышенной влажности в атмосфере.<br>\n<img class=\"image\" data-nd-image-orig=\"https://2.downloader.disk.yandex.ru/preview/01b3b96335004b448f7f855604403b305822ffb34e346dccd6df557364ba13bf/inf/qQgo1qDXlcXdJhyx2uh_GJbApkjhOVTyYhPw6Bapj4Ijwol2yH5qiSWSBSvwqFl308sOMOLl9JzJIR3ZV-r1xg%3D%3D?uid=295672&filename=%D0%B1%D0%B0%D1%80%D0%BE%D0%BC%D0%B5%D1%82%D1%80.png&disposition=inline&hash=&limit=0&content_type=image%2Fpng&tknv=v2&size=1280x829\" src=\"https://2.downloader.disk.yandex.ru/preview/01b3b96335004b448f7f855604403b305822ffb34e346dccd6df557364ba13bf/inf/qQgo1qDXlcXdJhyx2uh_GJbApkjhOVTyYhPw6Bapj4Ijwol2yH5qiSWSBSvwqFl308sOMOLl9JzJIR3ZV-r1xg%3D%3D?uid=295672&filename=%D0%B1%D0%B0%D1%80%D0%BE%D0%BC%D0%B5%D1%82%D1%80.png&disposition=inline&hash=&limit=0&content_type=image%2Fpng&tknv=v2&size=1280x829\" alt referrerpolicy=\"no-referrer\"></p>\n</li>\n<li>\n<p>Как летать автомиссии довольно подробно описано в дневнике у <strong data-nd-pair-src=\"**\"><a href=\"https://rcopen.com/blogs/74565/18700\" class=\"link link-int\" data-nd-link-orig=\"https://rcopen.com/blogs/74565/18700\">NARAJANA</a></strong>. Миссии можно планировать и загружать с помощью шнурочка по USB, но, чтобы внести изменения, надо коптер сажать и перезагружать ее заново через тот же шнурок. Это весьма неудобно, также как и таскать ноут с собой в полет, поэтому <a href=\"http://multicopterwiki.ru/index.php/Walkera_QR_X350_PRO._DEVO-M._ArduPilot#.D0.9F.D0.BE.D0.B4.D0.BA.D0.BB.D1.8E.D1.87.D0.B5.D0.BD.D0.B8.D0.B5_.D1.80.D0.B0.D0.B4.D0.B8.D0.BE.D0.BC.D0.BE.D0.B4.D0.B5.D0.BC.D0.B0_3DR\" class=\"link link-ext\" data-nd-link-orig=\"http://multicopterwiki.ru/index.php/Walkera_QR_X350_PRO._DEVO-M._ArduPilot#.D0.9F.D0.BE.D0.B4.D0.BA.D0.BB.D1.8E.D1.87.D0.B5.D0.BD.D0.B8.D0.B5_.D1.80.D0.B0.D0.B4.D0.B8.D0.BE.D0.BC.D0.BE.D0.B4.D0.B5.D0.BC.D0.B0_3DR\" target=\"_blank\" rel=\"nofollow noopener\">лучше подключить 3DR модем</a> и управлять им с планшета через <a href=\"https://www.google.ru/search?q=OTG+%D1%80%D0%B0%D0%B7%D1%8A%D0%B5%D0%BC&newwindow=1&source=lnms&tbm=isch&sa=X&ei=-d7sVJmWMaPcywPLjIGQDg&ved=0CAgQ_AUoAQ&biw=1920&bih=955\" class=\"link link-ext\" data-nd-link-orig=\"https://www.google.ru/search?q=OTG+%D1%80%D0%B0%D0%B7%D1%8A%D0%B5%D0%BC&newwindow=1&source=lnms&tbm=isch&sa=X&ei=-d7sVJmWMaPcywPLjIGQDg&ved=0CAgQ_AUoAQ&biw=1920&bih=955\" target=\"_blank\" rel=\"nofollow noopener\">OTG разъем</a>. Я поставил <a href=\"https://rcopen.com/r?to=http%3A%2F%2Fwww.banggood.com%2F3DR-Radio-Wireless-Telemetry-Module-Ground-Station-For-MWC-APM2_5-p-911052.html\" class=\"link link-ext\" data-nd-link-orig=\"http://www.banggood.com/3DR-Radio-Wireless-Telemetry-Module-Ground-Station-For-MWC-APM2_5-p-911052.html\" target=\"_blank\" rel=\"nofollow noopener\">вот такой с Банга в коробочках</a> на 915. Есть инфа, что на эту частоту они запрещены, но если в дальнейшем летать по LRS 433, то модем на 433 точно не подойдет. Тут уж личное дело каждого. Чтобы модем заработал, необходимо <strong data-nd-pair-src=\"**\">обязательно</strong> <a href=\"https://rcopen.com/forum/f135/topic361315/189\" class=\"link link-int\" data-nd-link-orig=\"https://rcopen.com/forum/f135/topic361315/189\">поменять на контроллере devo-m два резистора</a> 680 и 1к <strong data-nd-pair-src=\"**\">0402</strong> размера. Их можно поискать или на старой материнке или в не рабочем мобильнике. Процесс замены таких мелких резисторов весьма нетривиален. Если у вас нет опыта пайки лучше обратитесь к знакомому электронщику с микроскопом или в специализированную мастерскую по ремонту мобильников. Поверьте, выйдет дешевле, так как новый контроллер Devo-M стоит от 120уе плюс доставка, в зависимости от аппетитов продавца.</p>\n</li>\n</ol>\n<p>Некоторые телефоны и планшеты могут не работать с 3dr модемами или из-за отсутствия поддержки OTG (USB-host) или из-за отсутствия в системе <a href=\"http://www.ftdichip.com/Support/SoftwareExamples/Android/TN_147_Java_D2xx_for_Android_Demo_Source.zip\" class=\"link link-ext\" data-nd-link-orig=\"http://www.ftdichip.com/Support/SoftwareExamples/Android/TN_147_Java_D2xx_for_Android_Demo_Source.zip\" target=\"_blank\" rel=\"nofollow noopener\">драйверов USB-COM FTDI</a> (Архив скачать, разархивировать в папку на устройстве и запустить apk на устройстве). <a href=\"https://docs.google.com/spreadsheets/d/1rhHMxAGYzxQgMDdzxthuu6Nqb6t15GcUZjvtVT_KIOU/edit?usp=sharing\" class=\"link link-ext\" data-nd-link-orig=\"http://bit.ly/andmodem\" target=\"_blank\" rel=\"nofollow noopener\">Список телефонов и планшетов, с которыми модемы работают/не работают</a>.</p>\n<p><span class=\"image\" style=\"width: 1200px\" data-nd-image-orig=\"http://static.rcgroups.net/forums/attachments/5/3/0/3/2/6/a6716960-249-resistor_1.jpg\"><img src=\"http://static.rcgroups.net/forums/attachments/5/3/0/3/2/6/a6716960-249-resistor_1.jpg\" alt referrerpolicy=\"no-referrer\"><span class=\"image__spacer\" style=\"padding-bottom: 75.0000%\"></span></span></p>\n<p><span class=\"image\" style=\"width: 1200px\" data-nd-image-orig=\"http://static.rcgroups.net/forums/attachments/5/3/0/3/2/6/a6716961-244-resistor_2.jpg\"><img src=\"http://static.rcgroups.net/forums/attachments/5/3/0/3/2/6/a6716961-244-resistor_2.jpg\" alt referrerpolicy=\"no-referrer\"><span class=\"image__spacer\" style=\"padding-bottom: 75.0000%\"></span></span></p>\n<p>По непонятной причине контакты RX и TX на контроллере называются не по логике подключения RX to TX. На это надо буквально забить и подключать как на картинке. Кстати, модем приезжает с проводами точно в цвет означенного подключения.</p>\n<p><span class=\"image\" style=\"width: 800px\" data-nd-image-orig=\"http://www.dronetrest.com/uploads/db5290/478/69017a207467969c.jpg\"><img src=\"http://www.dronetrest.com/uploads/db5290/478/69017a207467969c.jpg\" alt referrerpolicy=\"no-referrer\"><span class=\"image__spacer\" style=\"padding-bottom: 75.0000%\"></span></span></p>\n<p>Модем <a href=\"https://rcopen.com/forum/f135/topic361315/3678\" class=\"link link-int\" data-nd-link-orig=\"https://rcopen.com/forum/f135/topic361315/3678\">лучше разместить сбоку</a> либо перепаяв родной разъем на угловой SMA, либо через угловой переходник.<br>\n<a class=\"attach attach-img attach__m-sm\" href=\"https://rcopen.com/member1453/media/53ee23fb99707300771b1684\" target=\"_blank\" data-nd-media-id=\"53ee23fb99707300771b1684\" data-nd-image-orig=\"https://rcopen.com/member1453/media/53ee23fb99707300771b1684\" data-nd-image-size=\"sm\"><img class=\"attach__image\" src=\"https://rcopen.com/files/53ee23fb99707300771b1684_sm\" alt width=\"170\" height=\"150\"></a> <a class=\"attach attach-img attach__m-sm\" href=\"https://rcopen.com/member1453/media/53ee23fb99707300771b10af\" target=\"_blank\" data-nd-media-id=\"53ee23fb99707300771b10af\" data-nd-image-orig=\"https://rcopen.com/member1453/media/53ee23fb99707300771b10af\" data-nd-image-size=\"sm\"><img class=\"attach__image\" src=\"https://rcopen.com/files/53ee23fb99707300771b10af_sm\" alt width=\"170\" height=\"150\"></a> <a href=\"https://rcopen.com/files/53ee23fb99707300771b2206\" class=\"link link-int\" data-nd-link-orig=\"https://rcopen.com/files/53ee23fb99707300771b2206\"><a class=\"attach attach-img attach__m-sm\" href=\"https://rcopen.com/member1453/media/53ee23fb99707300771b2206\" target=\"_blank\" data-nd-media-id=\"53ee23fb99707300771b2206\" data-nd-image-orig=\"https://rcopen.com/member1453/media/53ee23fb99707300771b2206\" data-nd-image-size=\"sm\"><img class=\"attach__image\" src=\"https://rcopen.com/files/53ee23fb99707300771b2206_sm\" alt width=\"170\" height=\"150\"></a></a> <a href=\"https://rcopen.com/files/53ee23fb99707300771b0b05\" class=\"link link-int\" data-nd-link-orig=\"https://rcopen.com/files/53ee23fb99707300771b0b05\"><a class=\"attach attach-img attach__m-sm\" href=\"https://rcopen.com/member1453/media/53ee23fb99707300771b0b05\" target=\"_blank\" data-nd-media-id=\"53ee23fb99707300771b0b05\" data-nd-image-orig=\"https://rcopen.com/member1453/media/53ee23fb99707300771b0b05\" data-nd-image-size=\"sm\"><img class=\"attach__image\" src=\"https://rcopen.com/files/53ee23fb99707300771b0b05_sm\" alt width=\"170\" height=\"150\"></a></a></p>\n<p>При вертикально ориентированных антеннах на земле и на борту он обеспечивает связь на расстоянии от 600 до 800 метров. Теперь можно с помощью программы Droid Planner управлять автомиссиями <a href=\"https://www.google.ru/search?q=MissionPlanner+flight+plan&newwindow=1&client=firefox-a&hs=uEo&rls=org.mozilla:ru:official&channel=sb&source=lnms&tbm=isch&sa=X&ei=FBJpVPTnOqbiywPQ_oDgAg&ved=0CAgQ_AUoAQ&biw=1920&bih=957#newwindow=1&rls=org.mozilla:ru:official&channel=sb&tbm=isch&q=droid+planner&imgdii=_\" class=\"link link-ext\" data-nd-link-orig=\"https://www.google.ru/search?q=MissionPlanner+flight+plan&newwindow=1&client=firefox-a&hs=uEo&rls=org.mozilla:ru:official&channel=sb&source=lnms&tbm=isch&sa=X&ei=FBJpVPTnOqbiywPQ_oDgAg&ved=0CAgQ_AUoAQ&biw=1920&bih=957#newwindow=1&rls=org.mozilla:ru:official&channel=sb&tbm=isch&q=droid+planner&imgdii=_\" target=\"_blank\" rel=\"nofollow noopener\">через закрепленный на аппаруре планшет</a>.</p>\n<p><span class=\"attach attach-img attach__m-orig\" data-nd-media-id=\"53ee23fb99707300771b1c4b\" data-nd-image-orig=\"https://rcopen.com/member1453/media/53ee23fb99707300771b1c4b\" data-nd-image-size=\"orig\" style=\"width: 800px\"><span class=\"attach__spacer\" style=\"padding-bottom: 75.0000%\"></span><img src=\"https://rcopen.com/files/53ee23fb99707300771b1c4b\" alt><a class=\"attach__link-control icon icon-link\" href=\"https://rcopen.com/member1453/media/53ee23fb99707300771b1c4b\" target=\"_blank\"></a></span></p>\n<p>Как управлять автомиссиями с планшета очень хорошо <a href=\"http://www.youtube.com/watch?v=85ZQ0E6AjPw&app=desktop\" class=\"link link-ext\" data-nd-link-orig=\"http://www.youtube.com/watch?v=85ZQ0E6AjPw&app=desktop\" target=\"_blank\" rel=\"nofollow noopener\">показано на видео от Юлиана</a>. Кроме того, с помощью модема значительно удобнее калибровать компас, работать с программой Mission Planner и <a href=\"https://rcopen.com/forum/f135/topic361315/4473\" class=\"link link-int\" data-nd-link-orig=\"https://rcopen.com/forum/f135/topic361315/4473\">находить улетевший аппарат</a>. Необходимо помнить, что RSSI на планшете отображает не качество канала управления, а качество связи между модемами.</p>\n<ol start=\"3\">\n<li>В принципе, для FPV полетов подвес вообще не нужен. Родная камера iLook с передатчиком обеспечит видеолинк на расстоянии до 300-500 метров и быстро надоест. Чтобы нормально летать по камере, необходимо иметь информацию RSSI о качестве сигнала между приемником и передатчиком в аппаратуре. С родного приемника RX703 RSSI взять неоткуда, поэтому, желательно полностью переделать ВЧ тракт 2.4, <a href=\"https://rcopen.com/blogs/1453/19631\" class=\"link link-int\" data-nd-link-orig=\"https://rcopen.com/blogs/1453/19631\">в аппаратуру Devo F7 поставить DHT модуль от FrSky</a>, а на борт поставить приемник D8R-XP. Кроме того, штатный приемник RX703 имеет особенность не восстанавливать управление после потери связи до полного RTL средствами контроллера, да и протокол devo не торт. В общем, переход на FrSky во всех смыслах рекомендуется.</li>\n</ol>\n<p><img class=\"image\" data-nd-image-orig=\"http://www.frsky-rc.com/product/images/pic/D8R-XP.jpg\" src=\"http://www.frsky-rc.com/product/images/pic/D8R-XP.jpg\" alt referrerpolicy=\"no-referrer\"></p>\n<p>Приемник D8R-XP замечательно встает на штатное место если снизу немного подкусить ребра жесткости внутри рамы коптера. Имеется довольно толковая <a href=\"http://www.rcgroups.com/forums/showthread.php?t=2183887\" class=\"link link-ext\" data-nd-link-orig=\"http://www.rcgroups.com/forums/showthread.php?t=2183887\" target=\"_blank\" rel=\"nofollow noopener\">инструкция с rcgroups по подключению D8R-XP в Walkera 350 Pro</a> и оригинальная <a href=\"http://www.frsky-rc.com/download/view.php?sort=&down=96&file=Manual-D8R-XP\" class=\"link link-ext\" data-nd-link-orig=\"http://www.frsky-rc.com/download/view.php?sort=&down=96&file=Manual-D8R-XP\" target=\"_blank\" rel=\"nofollow noopener\">документация FrSky к приемнику D8R-XP</a>. В приемнике необходимо замкнуть <strong data-nd-pair-src=\"**\">3 и 4 сигнальные пины</strong>, после чего он одним проводом подключается по CPPM в разъем DATABUS контроллера Devo-M вместо родного RX703.<br>\nПри большом желании можно подключить на A2 приемника <a href=\"http://static.rcgroups.net/forums/attachments/1/8/8/5/4/a3369234-32-FrSky_V_sensor.jpg\" class=\"link link-ext\" data-nd-link-orig=\"http://static.rcgroups.net/forums/attachments/1/8/8/5/4/a3369234-32-FrSky_V_sensor.jpg\" target=\"_blank\" rel=\"nofollow noopener\">voltage sensor</a> на резисторах для контроля бортового напряжения по телеметрии FrSky, но я этого не делал, поскольку напряжение прекрасно видно либо через планшет, либо через OSD по протоколу MavLink. Если делитель подключен, то напряжение борта можно контролировать через <a href=\"https://rcopen.com/r?to=http%3A%2F%2Fwww.banggood.com%2FFrSky-LCD-Telemetry-Display-FLD02-p-932018.html\" class=\"link link-ext\" data-nd-link-orig=\"http://www.banggood.com/FrSky-LCD-Telemetry-Display-FLD02-p-932018.html?lang=en-GB\" target=\"_blank\" rel=\"nofollow noopener\">отдельный экранчик FrSky</a>, который подключается в разъем модуля DHT. На нем же будет отображаться важный параметр RSSI качества канала управления. Без экранчика модуль DHT будет просто пищать зуммером при малом RSSI.</p>\n<ol start=\"4\">\n<li>Теперь можно приступить к установке OSD. Подойдет <a href=\"http://rcsearch.ru/wiki/MinimOSD\" class=\"link link-ext\" data-nd-link-orig=\"http://rcsearch.ru/wiki/MinimOSD\" target=\"_blank\" rel=\"nofollow noopener\">любая MinimOSD</a>. На ней надо <strong data-nd-pair-src=\"**\">запаять две перемычки и подавать питание только 5V</strong>. OSD будет работать и без перепаянных резисторов на контроллере.</li>\n</ol>\n<p><span class=\"image\" style=\"width: 300px\" data-nd-image-orig=\"http://i57.tinypic.com/34gt2kh.jpg\"><img src=\"http://i57.tinypic.com/34gt2kh.jpg\" alt referrerpolicy=\"no-referrer\"><span class=\"image__spacer\" style=\"padding-bottom: 100.0000%\"></span></span></p>\n<p>Далее прошиваем OSD прошивкой <a href=\"https://drive.google.com/file/d/0B8M9cK8S95zlTl84TTVkazNIX1U/preview?pli=1\" class=\"link link-ext\" data-nd-link-orig=\"https://drive.google.com/file/d/0B8M9cK8S95zlTl84TTVkazNIX1U/preview?pli=1\" target=\"_blank\" rel=\"nofollow noopener\">MinimOSDExtra_Copter_Prerelease_2.4_r789</a>. Заливаем шрифты из файла .mcm которые понравятся. Делаем <a href=\"https://rcopen.com/forum/f135/topic361315/1012\" class=\"link link-int\" data-nd-link-orig=\"https://rcopen.com/forum/f135/topic361315/1012\">настройки для OSD в Mission Planner</a>. Подключаем к контроллеру только RX и <a href=\"http://www.youtube.com/watch?v=jiDkKv0iC4k&app=desktop\" class=\"link link-ext\" data-nd-link-orig=\"http://www.youtube.com/watch?v=jiDkKv0iC4k&app=desktop\" target=\"_blank\" rel=\"nofollow noopener\">настраиваем экран вывода параметров</a>. Подробнее про прошивку и настройку OSD также можно посмотреть <a href=\"http://www.youtube.com/watch?v=jiDkKv0iC4k\" class=\"link link-ext\" data-nd-link-orig=\"http://www.youtube.com/watch?v=jiDkKv0iC4k\" target=\"_blank\" rel=\"nofollow noopener\">на видео у Юлиана</a>. Информация о напряжении питания борта и RSSI будет передаваться с контроллера в OSD по протоколу MavLink, но для вывода RSSI на экран OSD <a href=\"https://rcopen.com/forum/f135/topic361315/6591\" class=\"link link-int\" data-nd-link-orig=\"https://rcopen.com/forum/f135/topic361315/6591\">необходимо завести PWM RSSI приемника через RC фильтр на 95 ногу контроллера Devo-M</a> и <strong data-nd-pair-src=\"**\">включить RSSI в МП: RSSI_PIN=2, RSSI_RANGE=3,3</strong>. По ходу экспериментов и ошибочных подключений я убил этот порт на контроллере и пришлось заводить RSSI на 97 ногу и переключать параметр на RSSI_PIN=0. Так что осторожно! Кстати, пайка на ногу контроллера также требует весьма продвинутых скилов в этом направлении, как и замена резисторов для модема. Можно подпаяться на ногу маленьким проводочком с волос и от него уже делать вывод. Место пайки желательно залить жидкой изолентой типа Performix Liquid Tape или Plastic 71.</p>\n<p><img class=\"image\" data-nd-image-orig=\"https://3.downloader.disk.yandex.ru/preview/3eefad598ffa428e74343c88546724bcc74303ee0e35e85327eac7fd45d4a19d/inf/qQgo1qDXlcXdJhyx2uh_GPWBFpQzU605SLu7QIB1FFSbxEzcBf8MevY8BqK7WbQ86q-p50VgIsv0rWYWgbHqzg%3D%3D?uid=295672&filename=OSD%20connect%20to%20Devo-M.png&disposition=inline&hash=&limit=0&content_type=image%2Fpng&tknv=v2&size=1280x829\" src=\"https://3.downloader.disk.yandex.ru/preview/3eefad598ffa428e74343c88546724bcc74303ee0e35e85327eac7fd45d4a19d/inf/qQgo1qDXlcXdJhyx2uh_GPWBFpQzU605SLu7QIB1FFSbxEzcBf8MevY8BqK7WbQ86q-p50VgIsv0rWYWgbHqzg%3D%3D?uid=295672&filename=OSD%20connect%20to%20Devo-M.png&disposition=inline&hash=&limit=0&content_type=image%2Fpng&tknv=v2&size=1280x829\" alt referrerpolicy=\"no-referrer\"></p>\n<p><span class=\"image\" style=\"width: 1px\" data-nd-image-orig=\"http://savepic.su/4950741.jpg\"><img src=\"http://savepic.su/4950741.jpg\" alt referrerpolicy=\"no-referrer\"><span class=\"image__spacer\" style=\"padding-bottom: 100.0000%\"></span></span>В настройках OSD у меня стоит MAX RSSI 255 и показывает уровень 94-95%. Можно поставить 245, тогда на экране будет 99-100%. Минимальный RSSI = 50. Калибровкой через Enable RAW не пользовался. На сам экран параметров выводят кому что удобно: <strong data-nd-pair-src=\"**\">таймер, спутники, горизонт, напряжение борта, rssi и полетные режимы.</strong> Переключение режимов OSD на экране у меня выведено на Channel7=Переключатель GEAR. Также оказалось удобно не делать выноску на проводах из контроллера, а использовать штатные пины на неиспользуемых контактах моторов 6,7 и 8. Жалеть особо нечего, так как вероятность установки этого контроллера на восьмимоторный коптер равна нулю. Надо подрезать контактные площадки на плате, завести на не обозначенный M6 RX, на M7 TX и на M8 RSSI с ножки контроллера. Далее эти контакты подписать на корпусе и подключаться к ним обычными модельными джамперами с сигналом, 5V и GND.</p>\n<p><a href=\"https://yadi.sk/d/VaKlhJ7Z3JMz6w\" class=\"link link-ext\" data-nd-link-orig=\"https://yadi.sk/d/VaKlhJ7Z3JMz6w\" target=\"_blank\" rel=\"nofollow noopener\"><img class=\"image\" data-nd-image-orig=\"https://1.downloader.disk.yandex.ru/preview/423ee1988450d79abf2aeddd1d9f0679f31aba02816f2269a85d1afdda6815d1/inf/qQgo1qDXlcXdJhyx2uh_GDgsds994h9XHhy4QGiYVDMK47EYWkU-wjIgiAEqJa0r3HWU8gQvj48HeAQMZjZXKQ%3D%3D?uid=295672&filename=Upgrade%20Walkera350PRO.png&disposition=inline&hash=&limit=0&content_type=image%2Fpng&tknv=v2&size=1280x829\" src=\"https://1.downloader.disk.yandex.ru/preview/423ee1988450d79abf2aeddd1d9f0679f31aba02816f2269a85d1afdda6815d1/inf/qQgo1qDXlcXdJhyx2uh_GDgsds994h9XHhy4QGiYVDMK47EYWkU-wjIgiAEqJa0r3HWU8gQvj48HeAQMZjZXKQ%3D%3D?uid=295672&filename=Upgrade%20Walkera350PRO.png&disposition=inline&hash=&limit=0&content_type=image%2Fpng&tknv=v2&size=1280x829\" alt referrerpolicy=\"no-referrer\"></a></p>\n<ol start=\"5\">\n<li>Собственно все. После этих нехитрых доработок Walkera 350 pro вполне может использоваться для автомиссий и дальних FPV полетов. Я сознательно не рассматривал возможность сноса контроллера devo-m и установки вместо оного, например miniAPM. Просится конечно. Даже из-за того, что в devo-m нет полетных логов и отсутствует программный файлсев, но тогда это будет уже коптер с совсем другим сердцем. Оставлю его как есть — в конце концов меньше телодвижений с паяльником и не хочется расставаться с родными светодиодами арминга и контроля GPS. В качестве видеопередатчика можно использовать любой совместимый по частоте с Devo F7 по всему второму каналу FR2 5733,5752,5771,5790,5809,5828,5847,5866, например всем известный noname <a href=\"https://www.google.ru/search?q=ts+832&newwindow=1&hl=ru&biw=1920&bih=957&site=webhp&source=lnms&tbm=isch\" class=\"link link-ext\" data-nd-link-orig=\"https://www.google.ru/search?q=ts+832&newwindow=1&hl=ru&biw=1920&bih=957&site=webhp&source=lnms&tbm=isch\" target=\"_blank\" rel=\"nofollow noopener\">TS832</a> (ни разу не Боскам — в интернетах все врут) или <a href=\"https://rcopen.com/r?to=http%3A%2F%2Fwww.banggood.com%2FBoscam-32CH-5_8G-600mW-Wireless-Transmitter-p-972369.html\" class=\"link link-ext\" data-nd-link-orig=\"http://www.banggood.com/Boscam-32CH-5_8G-600mW-Wireless-Transmitter-p-972369.html\" target=\"_blank\" rel=\"nofollow noopener\">оригинальный Boscam на 600 mw</a>. Кстати, у последнего <a href=\"https://rcopen.com/forum/f135/topic361315/8211\" class=\"link link-int\" data-nd-link-orig=\"https://rcopen.com/forum/f135/topic361315/8211\">разъем один в один как у контроллера Devo-M</a>. <a href=\"http://canada.newark.com/jst-japan-solderless-terminals/bm04b-ghs-tbt-lf-sn/header-1-25mm-4way-smt-vertical/dp/73M9202\" class=\"link link-ext\" data-nd-link-orig=\"http://canada.newark.com/jst-japan-solderless-terminals/bm04b-ghs-tbt-lf-sn/header-1-25mm-4way-smt-vertical/dp/73M9202\" target=\"_blank\" rel=\"nofollow noopener\">Даташит</a>.</li>\n</ol>\n<p>Например, 5752 (22 канал) на TS832 соответствует Channel 7/8 на F7. В качестве FPV камеры рекомендуется <a href=\"http://www.surveilzone.com/DC5V-plastic-case-mini-sony-super-had-ccd-600tvl-super-camera-2.8mm-lens-for-fpv\" class=\"link link-ext\" data-nd-link-orig=\"http://www.surveilzone.com/DC5V-plastic-case-mini-sony-super-had-ccd-600tvl-super-camera-2.8mm-lens-for-fpv\" target=\"_blank\" rel=\"nofollow noopener\">DC5V~22V Plastic Case mini 600tvl Sony Super HAD CCD Super FPV Camera 2.8mm Lens</a>. Остается только определиться с очками или шлемом, но это уже совсем другая история…</p>\n<p>p.s. Один важный момент. Необходимо организовать питание видеолинка и камеры через отдельный Step Down с напряжением 8V (так помех меньше) и питание OSD также подключить отдельно. В обоих случаях подойдет <a href=\"https://rcopen.com/r?to=http%3A%2F%2Fwww.banggood.com%2Fru%2FDC-DC-Adjustable-Power-Supply-Buck-Converter-Step-Down-Module-p-922049.html\" class=\"link link-ext\" data-nd-link-orig=\"http://www.banggood.com/ru/DC-DC-Adjustable-Power-Supply-Buck-Converter-Step-Down-Module-p-922049.html\" target=\"_blank\" rel=\"nofollow noopener\">вот такой с Банга</a>. OSD будет работать и от штатного питания по схеме выше, но с учетом его капризности и частоты выгорания лучше обезопасить остальную электронику. Пока шаманил с подключениями, ошибся и столкнулся с волшебным синим дымом. В результате минус OSD, минус мелкий Фатшарк 600 на 5V, минус видеопередатчик и модем, минус порт на контроллере и потеря времени. Так что запрягайте сразу правильно и внимательно подключайте разъемы JST — они втыкаются легко наоборот.</p>\n<p>upd: Еще можно поменять родной GPS модуль <a href=\"https://rcopen.com/forum/f135/topic361315/7097\" class=\"link link-int\" data-nd-link-orig=\"https://rcopen.com/forum/f135/topic361315/7097\">на модуль Алексея Козина GPS/GLONASS на МediaTek MT3333</a>. Ловит спутники даже в квартире, но на “болтанку в лойтере” может не повлиять. У меня и с родным летает отлично.</p>\n<p>upd2: На всякий случай <a href=\"https://rcopen.com/forum/f135/topic361315/7208\" class=\"link link-int\" data-nd-link-orig=\"https://rcopen.com/forum/f135/topic361315/7208\">ссылка на полезный архив с прошивкой 1.0 при откате со старших версий</a>:</p>\n<ul>\n<li>default_X350_Pro1.0.bin.param (файл параметров, с которыми летает идеально)</li>\n<li>X350_Pro1.0.bin (прошивка Walkera 350 Pro 1.0)</li>\n<li>upgrade quide.pdf (инструкция по прошивке)</li>\n<li>SerialAngel.exe (программа для прошивки)</li>\n<li>Original Config X350_Pro1.0.bin (для исправления номера прошивки при откате со старших версий и после setup erase в терминале)<br>\nЕсли после манипуляций с прошивками и команды setup erase перестали сохраняться параметры контроллера в Mission Planner, то файл Original Config X350_Pro1.0.bin необходимо записать в контроллер через закладу Config программы SerialAngel.exe. И все опять будет сохраняться.</li>\n</ul>\n<p>upd3: <a href=\"https://rcopen.com/clubs/c333\" class=\"link link-int\" data-nd-link-orig=\"https://rcopen.com/clubs/c333\">Walkera QR-X350Pro-недокументированные возможности и апгрейды</a>. Группа для обсуждения без флуда. Причина создания группы — не редактируемая шапка профильной темы на форуме, в которой уже после 100-й страницы что-либо найти трудно, а после 200-й вообще не реально.</p>\n<p>upd4: Для энтузиастов <a href=\"https://rcopen.com/forum/f135/topic361315/7729\" class=\"link link-int\" data-nd-link-orig=\"https://rcopen.com/forum/f135/topic361315/7729\">имеется подробный фототчет по прошивке контроллера devo-m в стандартный APM</a>. Необходимо, вначале, заменить стандартный бутлоадер контроллера через SPI интерфейс при помощи программатора USBASP и потом залить в него новую прошивку. Однако необходимо помнить, что откат назад будет невозможен. Ссылка на архив с инструкцией совместного творчества <a href=\"https://rcopen.com/member211096\" class=\"link link-int\" data-nd-link-orig=\"https://rcopen.com/member211096\"><strong data-nd-pair-src=\"**\">Biozz</strong></a> и <a href=\"https://rcopen.com/member221373\" class=\"link link-int\" data-nd-link-orig=\"https://rcopen.com/member221373\"><strong data-nd-pair-src=\"**\">bifurkas</strong></a> <a href=\"https://yadi.sk/d/P7qi_Eb3gLW83\" class=\"link link-ext link-auto\" data-nd-link-type=\"autolink\" data-nd-link-orig=\"https://yadi.sk/d/P7qi_Eb3gLW83\" target=\"_blank\" rel=\"nofollow noopener\">yadi.sk/d/P7qi_Eb3gLW83</a>. Здравствуй ардукоптер!</p>\n<p><img class=\"image\" data-nd-image-orig=\"http://savepic.ru/6898281.jpg\" src=\"http://savepic.ru/6898281.jpg\" alt referrerpolicy=\"no-referrer\"></p>\n<p>upd5: Таблица совместимости частот передатчиков и приемника видео devo F7 <a href=\"https://rcopen.com/forum/f135/topic361315/9319\" class=\"link link-int\" data-nd-link-orig=\"https://rcopen.com/forum/f135/topic361315/9319\">от WhiteWind</a>.<br>\n<span class=\"attach attach-img attach__m-orig\" data-nd-media-id=\"55bcbcbf997073007762d329\" data-nd-image-orig=\"https://rcopen.com/member218906/media/55bcbcbf997073007762d329\" data-nd-image-size=\"orig\" style=\"width: 799px\"><span class=\"attach__spacer\" style=\"padding-bottom: 24.2804%\"></span><img src=\"https://rcopen.com/files/55bcbcbf997073007762d329\" alt><a class=\"attach__link-control icon icon-link\" href=\"https://rcopen.com/member218906/media/55bcbcbf997073007762d329\" target=\"_blank\"></a></span></p>\n<p>upd6: Заливка прошивки Ардукоптера в devo-m без смены загрузчика при помощи Walkera decode.exe. <a href=\"https://rcopen.com/forum/f135/topic361315/9741\" class=\"link link-int\" data-nd-link-orig=\"https://rcopen.com/forum/f135/topic361315/9741\">Подробнее тут</a>. Соответственно сохраняется возможность вернуть родную прошивку Валкеры. Готовая прошивка на сайте Алексея Козина <a href=\"http://hobby.msdatabase.ru/project-updates/theresultsofoursurvey/ardupilot-gps/gps-glonass-mt3333/apm_arducopter_firmware\" class=\"link link-ext\" data-nd-link-orig=\"http://hobby.msdatabase.ru/project-updates/theresultsofoursurvey/ardupilot-gps/gps-glonass-mt3333/apm_arducopter_firmware\" target=\"_blank\" rel=\"nofollow noopener\">AC_32_wogimbal_v2_DEVOM_WALKERA_x350_Pro.bin.rar</a> !!!Внимание прошивка работает с родным загрузчиком Devo-M и не подходит для контроллера APM!!! Приобретаем все плюшки и преимущества APM, например, логи, но теряем родные светодиоды арминга и GPS.</p>\n<p>upd:7 Что еще в этот корпус можно поставить? <a href=\"https://rcopen.com/forum/f135/topic361315/12191\" class=\"link link-int\" data-nd-link-orig=\"https://rcopen.com/forum/f135/topic361315/12191\">Да хоть Naza-M Lite</a>.</p>\n","user":"3e71bd093df95500777968ea","ts":"2015-02-24T22:35:14.000Z","st":1,"cache":{"comment_count":27,"last_comment":"56b001d69970730077130055","last_comment_hid":27,"last_ts":"2016-02-02T01:09:42.000Z","last_user":"54c9ec7c3df955007772115f"},"views":19970,"bookmarks":0,"votes":0},"subscription":null},"locale":"en-US","user_id":"000000000000000000000000","user_hid":0,"user_name":"","user_nick":"","user_avatar":null,"is_member":false,"settings":{"can_access_acp":false,"can_use_dialogs":false,"hide_heavy_content":false},"unread_dialogs":false,"footer":{"rules":{"to":"common.rules"},"contacts":{"to":"rco-nodeca.contacts"}},"navbar":{"tracker":{"to":"users.tracker","autoselect":false,"priority":10},"forum":{"to":"forum.index"},"blogs":{"to":"blogs.index"},"clubs":{"to":"clubs.index"},"market":{"to":"market.index.buy"}},"recaptcha":{"public_key":"6LcyTs0dAAAAADW_1wxPfl0IHuXxBG7vMSSX26Z4"},"layout":"common.layout"}






 В настройках OSD у меня стоит MAX RSSI 255 и показывает уровень 94-95%. Можно поставить 245, тогда на экране будет 99-100%. Минимальный RSSI = 50. Калибровкой через Enable RAW не пользовался. На сам экран параметров выводят кому что удобно: таймер, спутники, горизонт, напряжение борта, rssi и полетные режимы. Переключение режимов OSD на экране у меня выведено на Channel7=Переключатель GEAR. Также оказалось удобно не делать выноску на проводах из контроллера, а использовать штатные пины на неиспользуемых контактах моторов 6,7 и 8. Жалеть особо нечего, так как вероятность установки этого контроллера на восьмимоторный коптер равна нулю. Надо подрезать контактные площадки на плате, завести на не обозначенный M6 RX, на M7 TX и на M8 RSSI с ножки контроллера. Далее эти контакты подписать на корпусе и подключаться к ним обычными модельными джамперами с сигналом, 5V и GND.
В настройках OSD у меня стоит MAX RSSI 255 и показывает уровень 94-95%. Можно поставить 245, тогда на экране будет 99-100%. Минимальный RSSI = 50. Калибровкой через Enable RAW не пользовался. На сам экран параметров выводят кому что удобно: таймер, спутники, горизонт, напряжение борта, rssi и полетные режимы. Переключение режимов OSD на экране у меня выведено на Channel7=Переключатель GEAR. Также оказалось удобно не делать выноску на проводах из контроллера, а использовать штатные пины на неиспользуемых контактах моторов 6,7 и 8. Жалеть особо нечего, так как вероятность установки этого контроллера на восьмимоторный коптер равна нулю. Надо подрезать контактные площадки на плате, завести на не обозначенный M6 RX, на M7 TX и на M8 RSSI с ножки контроллера. Далее эти контакты подписать на корпусе и подключаться к ним обычными модельными джамперами с сигналом, 5V и GND.

