VIK-1 модельная альтернатива программе VTOL X-Plane

А ты не пробовал этот вариант только с нижними движками?.
В смысле без верхних? Дак с этого все и началось, кончилось опрокидыванием на нос на переходном режиме.
Управляемая плоскость в потоке - это скорее управляемый вектор тяги, чем рычаг.
Это как раз то, что Вам нужно - управляющий момент
Это как раз то, что Вам нужно - управляющий момент
Я это уже проверял на практике. Все чего можно добиться с помощью УВТ, это управлять низом аппарата относительно верхнего ЦТ, за счет силы тяжести. Это как удерживать вертикальную палку на пальце.
А теперь представьте, что нужно развернуть силовые установки в горизонт, т.е. палец стал сбоку указки. Теперь положением указки управлять невозможно.
Для бикоптера-конвертоплана из привычных устройств подходит только вертолетный автомат перекоса. Вот я и пытаюсь сделать аналог автомата перекоса, но на винтах постоянного шага.
Для поворота винтов в горизонт надо сначала набрать скорость, чтобы стало эффективным аэродинамическое управление. Надо создать малый наклон винтов для разгона, а для стабилизации в переходном режиме и нужны струйные рули.
Можно обойтись и без них, но только со с электронной стабилизацией
При малом наклоне винтов получим небольшую горизонтальную составляющую, а значит малую скорость. В результате модель еще на крыло не легла, а устойчивость висения уже теряет. Проблема в том, что у бикоптера СУ привязаны к ЦТ, и при наклоне винтов уже при 45% практически невозможно управлять струйными рулями или УВТ. Так как мы воздействуем на ЦТ, а не на положение модели.
Конечно можно извернуться, к примеру поднять модель повыше и с разворотом СУ бросить ее в пике для набора скорости. Или устроить так называемый джамп-взлет, когда поднятые вверх винты рывком отрывают модель от поверхности с придачей ей горизонтальной составляющей. Но все это извращения, и для меня не подходят.
Обращу внимание еще раз: УВТ, струйные рули и прочие рулевые поверхности в потоке винта работают в двух случаях: если точка приложения силы находится за ЦТ или перед ЦТ. Третьего не дано, а у бикоптера СУ изначально воздействуют непосредственно на центр тяжести.
Возьмите любую модель самолета и поверните за ось ЦТ, обратите внимание насколько серьезное усилие нужно. Это не на горизонтальной скорости за рычаг стабилизатора или хвостового УВТ дергать.
За 4 года я провел несколько десятков экспериментов на эту тему, поэтому опираюсь на свой практический опыт.
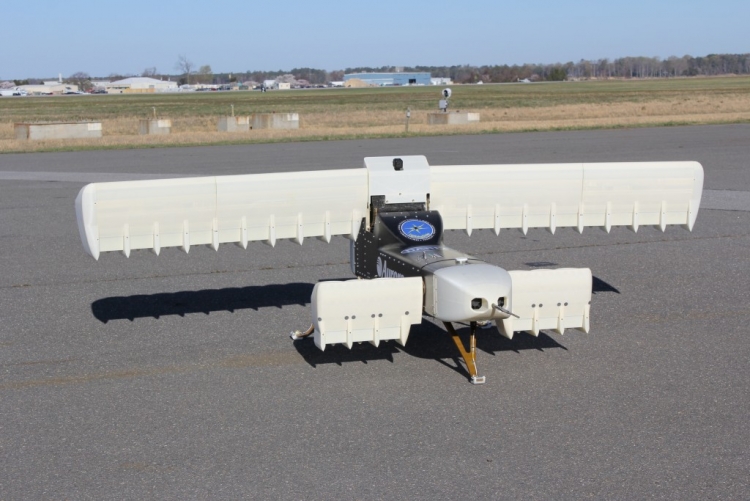
Вот мой вариант с УВТ, о котором вы говорите. Даже если к нему приделать крылья, он не пройдет переходный режим, а рухнет носом вниз.
P.S. На видео, что вы прислали принцип летающей башни, это не бикоптер, а воздушный шарик с грузиком.
струйные рули и прочие рулевые поверхности в потоке винта работают в двух случаях: если точка приложения силы находится за ЦТ или перед ЦТ. Третьего не дано
Т.е. Вы сами говорите, что без плеча не создать управляющего момента, тогда на каком принципе вы хотите организовать управление? Автомат перекоса тоже создает момент, плечо которого - лопасть винта. Только это гораздо более сложный способ управления. Причем точка приложения тяги винта у вертолета вовсе не совпадает с центром масс, а выше его.
Причем точка приложения тяги винта у вертолета вовсе не совпадает с центром масс, а выше его.
Для вертолета все равно где будет располагаться винт с АП, можно и на центре масс, но это конструктивно неудобно. В придачу с нижним ЦТ устойчивость будет повыше, добавляется эффект летающей башни из поста N355. Но это не VTOL, ему не нужно ложится на крыло. Образно: берем гирьку (сам вертолет), привязываем веревку и таскаем гирьку рукой за веревку. Рука в данном случае это винт с АП.
Для примера VTOL с АП , это Bell V-22 Osprey. Где веревка постепенно переходит с верха аппарата на нос.
тогда на каком принципе вы хотите организовать управление? Автомат перекоса тоже создает момент, плечо которого - лопасть винта. Только это гораздо более сложный способ управления.
Я уже писал, для этого мне и нужен аналог автомата перекоса, но более простой. И с меньшим диаметром винтов, чем у вертолета. Пост №344.
Хотя мне он уже не кажется таким уж простым. Скорее он - другой.
Здравствуйте, Виктор.
Может, вместо автомата перекоса поставить ещё одну серву, и двигать ей силовую установку вперёд-назад?
И, таким образом, регулировать тангаж?
С уважением, Андрей.
Может, вместо автомата перекоса поставить ещё одну серву, и двигать ей силовую установку вперёд-назад?
Это одно из первых, что приходит в голову тем, кто сталкивается с вертикальным висением. Некоторые пошли дальше (мысленно), установили тележку, катающуюся по рельсам на фюзеляже, а к тележке привязали СУ.
Т.к. опорой являются винтомоторные группы, значит в итоге надо будет двигать весь фюзеляж относительно СУ.
Способ рабочий, но его основная проблема - инерционность. Все будет происходить настолько медленно, что приведет либо к качелям, либо будет висеть блинчиком и плавно перемещаться, дабы не привести к этим качелям.
В висении модель опирается винтами на воздух, отталкиваемый винтами. Именно от воздуха нужно отталкиваться как по крену, так и по тангажу. Желательно свести работу гравитации к минимуму, а не ставить ее во главу угла.
Здравствуйте, Виктор.
Речь не о тележке.
Штангу с силовой установкой поставить на вертикальную ось.
Что относительно чего двигается, определяется только массой, значит, всё же су относительно фюзеляжа.
Попробую сделать бикоптер для проверки, только, боюсь, сильно быстро не получится, т.к. никакими коптерами никогда не занимался. Придётся разбираться с настройками контроллера.
Подождите недельку-другую, проверим, как будет работать.
С уважением, Андрей.
катающуюся по рельсам на фюзеляже,
Посмотри в сторону параллелограммных механизмов.
Штангу с силовой установкой поставить на вертикальную ось.
Я вас понял. Но для бикоптеров уже есть проверенная летающая схема. Для СВВП ваш вариант все равно не подойдет по той же причине, не пройдет переходный режим.
Посмотри в сторону параллелограммных механизмов.
Я уже описал недостатки механического изменения центра масс. Но мысль неплохая.
Небольшой устный отчет. В четвертый раз доработанные СУ из поста №350 были проверены в воздухе.




Переворота по тангажу и крену не было, но выяснилось, что система отказывается работать в висении по курсу. Дело в том, что при противоположном наклоне спаренных СУ, они пытаются изогнуть поворотную балку в противоположных направлениях, компенсируя друг друга.
Что никак не сказывается на курсе.
Решено в пятый раз переделать СУ, кстати каждый раз моторамы прочнее и меньше при том же весе.


Данная моторама рассчитана на установку двух серв, каждая серва будет управлять наклоном своего двигателя. Таким образом я рассчитываю получить управление по курсу.
Как раз на в Китае были скидки, заказал 4 одинаковых цифровых серв с металлическими редукторами. Теперь жду их.
Пока едут сервы. Изготовил новую поворотную балку из алюминиевой трубки. Старая из углепластика раскололась при ударе.




Так же дополнительно установлены элевоны по типу летающего крыла.




А еще модель была облегчена на 70г. за счет замены деревянной балки на углепластиковую, что позволит без увеличения веса установить дополнительно четыре 13гр. сервы.
DARPA, создавшая конкурс по VTOL X-Plane, уже показывает некоторые достижения 24-роторного дрона. Есть видео висения.
Интересно, как они собираются задействовать столько фенов на реальном самолете?
“Он должен развивать скорость в пределах 300–400 узлов (до 741 км/ч), и поднимать груз не менее 4000 фунтов (1814 кг)”
Похоже, ТРД поставят.
Похоже, ТРД поставят.
24 штуки? Баки с горючим в крылья не запихать, значит они в фюзеляже. Похоже весь груз - это собственная горючка.
Наконец пришли сервы, оказывается 9 дней лежали в службе доставки. Хорошая работа почты, надо бы руководителям премии выписать. 😈
Установил.

Прикрутил моторы, закрепил провода.

Установил СУ на балку.



Полдня настраивал. Путаница возникла не только потому, что на аппарате стоит 4 двигателя с регуляторами и 7 сервоприводов. Совсем выпустил из внимания, что нижние сервы на СУ управляют верхними двигателями и наоборот. Когда сообразил, пришлось менять полярности у настроек.
В следующие выходные займусь настройкой параметров движков, установлю винты и наконец начнутся реальные проверки.
Не знаю как летать , но віглядеть стал однозначно лучше. А зачем ты оси поврота моторов снова снизу сделал? Опять балансирные эффекты ж будут.
Оси поворотов моторов стоят сверху и снизу поворотной балки. Все усилие должно прилагаться на балку. В идеале вертикальное расположение ЦТ тоже должно приходиться на балку, возможно с этим еще придется столкнуться.
Другими словами система объединяет верхнее и нижнее балансирное управление, компенсируя их недостатки и используя их достоинства. В теории. 😉
Коллеги, у меня возникло несколько вопросов, найденная информация в сети сильно разная. Речь идет о силовых установках с соосными винтами.
- кто-нибудь в курсе, как распределяются нагрузки между соосными винтами в статическом и динамическом режимах?
- имеет смысл на втором винте установить бОльшие обороты, чем на первом?
- имеет смысл ставить винты с разным шагом?
1 если винты близко расположены может возникнуть резкий подъём тяги при совпадении оборотов.
по 1.и 2. да и да если близко расположены -у меня при 12" винтах и 5 см между ними винт работающий в потоке на 10-20% разгружался.
Улучшение эффективности соосников:
У вас одинаковые винты сверху и снизу? Тогда можно увеличить эффективность соосника на ~5%:
Для начала, сделайте нижний винт меньше верхнего примерно на дюйм и увеличите его шаг на 1,5 дюйма (например, 14х4,5 и 13х6,5).
Если нет возможности так сделать, то тогда нижний винт должен вращаться быстрее верхнего. В противном случае нижний винт будет просто вращаться в потоке верхнего. Таким образом, вы так же теряете немного эффективности при вертикальных манёврах.
винт работающий в потоке на 10-20% разгружался
Виталий, а как вы это определили, амперметр стоял?
да именно
амперметр стоял
,на тот момент мерил 2мя амперметрами,но это было на “аватаровской машине” там ещё кольцо было,на верхнем моторе ток был около 20А,а нижний жрал 15-16.
в вашем случае я думаю взаимное влияние будет незначительным поскольку довольно большое растояние между винтами относительно диаметров.