Экскаватор гидравлический CAT320D 1/16

Запустил бесколлеторный двигатель, скорость и сила теперь 😃, то что нужно, даже пришлось немного ограничивать темп.
Ниже небольшое видео.
Ещё протестировал привод ходовой, не то что я ожидал…
В общем буду переделывать привод, поставлю двигатели непосредственно на оси ведущих катков, будет надежнее.
Главное что гидравлика начала работать как нужно 😃, при этом за три часа тестирования - ничего не нагрелось, не двигатель, не насос и не регулятор скорости, только всего лишь посадил две батареи.
И это радует, остальное уже дело времени.
Здравствуйте Александр. Да,так пожалуй веселее. Очень здорово что Вы не останавливаетесь на достигнутом и все время модернизируете модель. Гидравлика супер. Кстати и навыки экскаваторщика у Вас растут не по дням а по часам. Без работы не останетесь!!!
Кстати и навыки экскаваторщика у Вас растут не по дням а по часам. Без работы не останетесь!!!
😁😃
Привет, Александр!..так Вы все таки остановились на испанской гидравлике?..как качество?..как она после первых тестов, не течет?.спасибо!
Привет, Александр!..так Вы все таки остановились на испанской гидравлике?..как качество?..как она после первых тестов, не течет?.спасибо!
Испанские цилиндры хорошие, не один не потек, давление держат, и главное что они обслуживаемые.
Немецкие так же хорошего качества, у меня сейчас получилось два комплекта часть испанских и часть немецких .
Небольшие зарисовки;)






Для ходовой заказал двигатели с металлическим редуктором 19:1


(Не реклама) - electronshik.ru/…/191-metal-gearmotor-37dx52l-enco…
Сегодня должны привезти, планирую их монтировать так , чтобы валы двигателей были одновременно и основными осями, т.е. на них будут крепиться ведущие катки.
Правда для этого придется попытаться втиснуть в моторный отсек ещё два регулятора скорости, к этим моторам.
Вот так примерно

Для ходовой заказал двигатели с металлическим редуктором 19:1
Вам не нужно столько оборотов на выходе (500об/мин) , для экскаватора будет достаточно 150-200 об/мин. А в идеале вообще 100 об/мин.
banned link (не реклама!) думаю вот этот вам к месту встанет. единственный минус 66мм длинна его… слишком торчать будет… а Вы же вроде сначала хотели привода на цепях сделать?
banned link (не реклама!) думаю вот этот вам к месту встанет. единственный минус 66мм длинна его… слишком торчать будет… а Вы же вроде сначала хотели привода на цепях сделать?
вот еще нашел интересное решение
вот еще нашел интересное решение [/QUOTE]
Хороший вариант.
Может быть позже так и сделаю.
Сейчас необходимо все поставить на ход, время ограничено.
Буду делать так как на схеме, без ущерба для работоспособности.
Вам не нужно столько оборотов на выходе (500об/мин) , для экскаватора будет достаточно 150-200 об/мин. А в идеале вообще 100 об/мин.
Согласен.
Заказал то, что было в наличии на складе, так же весь потенциал двигателя использовать не планирую, будет работать на минимальных оборотах.
Изначально планировал делать все иначе, собрал , протестировал - не устроило.
Сейчас необходимо запустить уже готовый вариант, по сему с этими двигателями пока буду собирать.
Позже, после выставки можно будет доработать, как раз будет возможность проверит все системы в работе.
Вот примерно так: 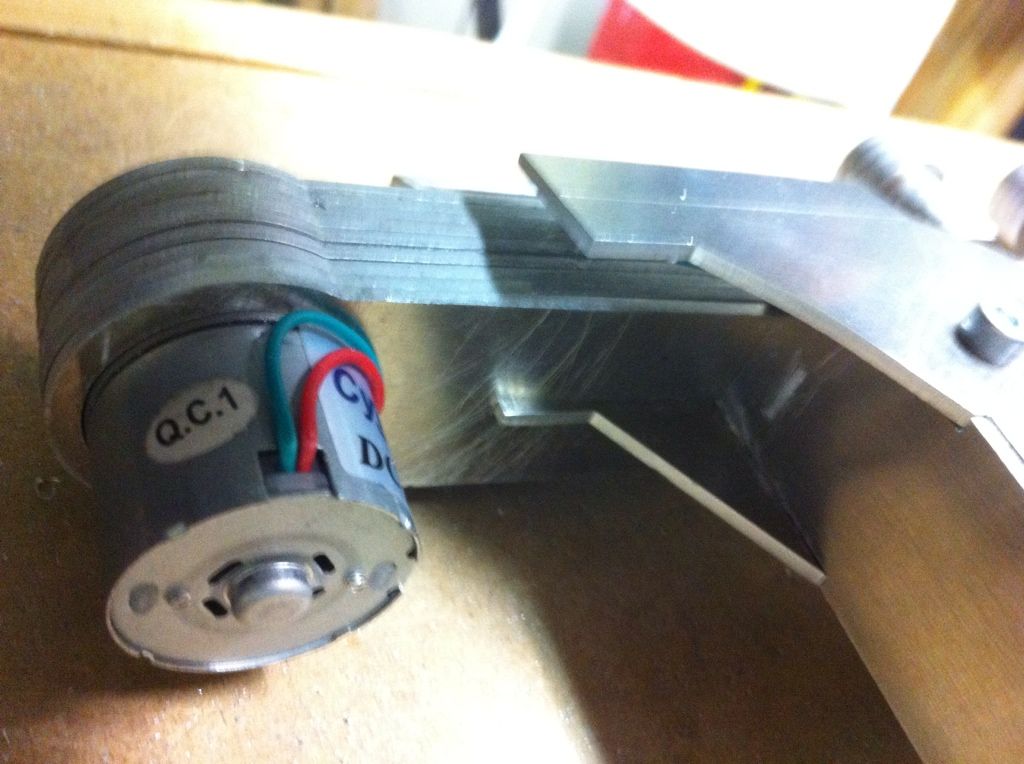
Вот такие редукторы снял в копировальных аппаратах, возможно и остались, только они на 24в
Немного не по теме и может кто уже и видел этот ролик, но хотел поделиться;)
Установил двигатели, протестил, лишнею скорость можно будет убрать программно, через регуляторы скорости.






По столу понятно. Но вес то не полный . А если пустить в песочнице . Песок набьётся в петли траков и сопротивление ходу сильно увеличится . На моей старой модели набилось, так что ходовую заклинило. Траки на ней были из листовой латуни, 0.5 мм гнутые с пальцем. После той модели решил ,гусеницы на модели должны быть резиновые если для улицы,особенно если модель скоростная типа-МТЛБ.
Саша привет! Теперь можно будет и землю покапать и в гонках поучаствовать 😉
В ходовую набьётся всякого мусора, помимо песка, прутики,веточки. Ведомое колесо-ленивец помимо натягивающего элемента, должно иметь упругий -пружину . Чтоб компенсировать попадение мусора на ведущую звёздочку.
По столу понятно. Но вес то не полный . А если пустить в песочнице . Песок набьётся в петли траков и сопротивление ходу сильно увеличится . На моей старой модели набилось, так что ходовую заклинило. Траки на ней были из листовой латуни, 0.5 мм гнутые с пальцем. После той модели решил ,гусеницы на модели должны быть резиновые если для улицы,особенно если модель скоростная типа-МТЛБ.
Именно так и было с предыдущей ходовой, у которой был цепной привод. Набился песок и начало подклинивать.
Этот привод тестил по полу, с небольшой нагрузкой, все вреде бы нормально (Видео позже сделаю, неудобно было одной рукой снимать и двумя стиками управлять), запас мощности ещё остается приличный.
Для помещения точно хватит, по мягкому грунту буду тестить уже когда все соберу.
Саша привет! Теперь можно будет и землю покапать и в гонках поучаствовать 😉
Да, при желании можно будет даже дрифтить 😃))
Эти редуктора мощные и механизм из металла продавит лбой песок мало того трак у эксковатора сделан таким образом что катки едут не по самой гусенеце а по специальной дорожке выше уровня грунта. Если таркторист опытный он будет следить што бы траки не забились. А если без головы так можно и 1к1 трактор разуть.
Ведомое колесо-ленивец помимо натягивающего элемента, должно иметь упругий -пружину .
Это я понимаю, планировал установить все через пружину в ведомом катке. Позже в мае буду дорабатывать ходовую, поставлю другие редукторы (Уже заказал их), создам натягивающий механизм либо на ведомых катках, либо на верхних катках.
Установил двигатели, протестил, лишнею скорость можно будет убрать программно, через регуляторы скорости.
Александр, могли бы написать, какие регуляторы скорости планируете использовать для моторчиков с редукторами перемещения тележки и какой регулятор используется для поворота платформы?