Трикоптер.

У меня тоже в полете всё отлично было, болтало только если резкий порыв ветра, а вот моторы глушишь и сервера начинает сходить с ума, при этом мозги сначала стояли на 4х стойках и всё это дико дергалось, потом налепил на раму на толстый скотч и стало намного лучше, но проблема всеравно осталась немного. А вот на 1.9 такого не было, но там как я помню, с Z осью не работали еще полноценно и видимо поэтому такого не происходило.
у меня кстаии лапы были как у шведа, на них просто жесть, зато куча падений и ничего серьезного не было, стяжки рулят =)
Вот и хочу сравнить 1.9 и 2.0, аналоговая серва работает-проверял не дёргается (на мультивие помоему аналоговые не работают - но могу ошибатся)…
У меня аналоговая и цифровая стояли, один фиг на 1.9 не тряслось, на 2.0 тряслось… а вообще надо ли оно? В полете то всеравно всё ок =)
Моторы или регулятор с мотором?
Менял в паре мотор-регуляторы. Регуляторы калибровал отдельно каждый.
я уж и не зная какую попробовать - та же история! Вот сейчас жду как у Шведа, чем черт не шутит… Уже и плече на серве в минимально возможное загнал, не шипко помогло. Я тут уж и спрашиал, как у кого… - тишина.
отлично работала такая сервушка: hobbyking.com/…/__8752__Turnigy_380MG_Micro_Servo_… пережила больше 10 падений, поменяла три рамы)) центр даже не сбился, сейчас лежит, ждёт подвеса
Выношу на суд общественности поворотный механизм
Я делал вот так хвостовой механизм поворота. Все отлично летало и также не боялось крэшей.
Ну вот и попробовал я что такое трешка. Понравилось намного больше чем квад. по курсу рулится просто класс и не плывет по высоте при этом. Сейчас бы конечно не стал делать снова такую раму. С акком 4ач весит 1020г.
У меня аналоговая и цифровая стояли, один фиг на 1.9 не тряслось, на 2.0 тряслось… а вообще надо ли оно? В полете то всеравно всё ок =)
Я всле за Таймкопом обновил прошивку, серва стала на много вменяемей…
Прошивку чего на какую?
На контроллере своём, аля NAZE32 Pirates Edition
Баро работает в вашей пррошивке?
На контроллере своём, аля NAZE32 Pirates Edition
На предыдущих прошивках серва дрожала? Интересно с чем это связано?
Баро работает в вашей пррошивке?
По ходу он у меня дохлый, так что в ожидании нового, всё отличие от NAZE32 это LSM330 - гира+аксель
На предыдущих прошивках серва дрожала? Интересно с чем это связано?
это в мультивие 1.9 2.0 2.1 надо поковырятся, а руки не доходят…
Добрый день уважаемые форумчане! =)
Взялся за постройку трикоптера по инструкции с rcexplorer.se (версия 2.5) комплектующие все один в один. Опыта в сборке и использовании авиамоделей нуль.😇 Аппу купил Turnigy 9x.
Собрал раму, регуляторы настроил, появилось несколько вопросов:
- Все винты должны вращаться в одну сторону, а в какую не важно? (Просто есть и против часовой и по, какие поставить, есть-ли разница?)
- Перед установкой сервы на место ее нужно как-то в ноль выставить?
P.S.
Тему перечитывал, но от этого только каша в голове - слишком много информации… 😦
это в мультивие 1.9 2.0 2.1 надо поковырятся, а руки не доходят…
Вобшем поменял я серву - отписался тут
Добрый день уважаемые форумчане! =)
Винты можно (лучше) ставить разного вращения - реактивный момент меньше и первоначальное (центральное) положение севы выкашивать меньше придётся, если контроллер КУК, то серву можно и от приёмника выставить в центральное положение, а потом уже выставлять на аппарат…
Винты можно (лучше) ставить разного вращения - реактивный момент меньше и первоначальное (центральное) положение севы выкашивать меньше придётся, если контроллер КУК, то серву можно и от приёмника выставить в центральное положение, а потом уже выставлять на аппарат…
Т.е. как в инструкции для KK
Меня, просто смутило, на rcexplorer в инструкции по настройке винты одного вращения использованы, а в инстукции kkmulticopter - встречного.
В самой инструкции пока не разобрался, никак не могу найти толкового перевода.
Можно поподробнее про выставление сервы? Нужно провести настройку по инструкции с kkmulticopter, а потом уже серву на место ставить?
На трикоптере неважно направление вращения винтов т.к. не используется реактивный момент для поворота в отличии от других многомоторных систем, а используется серва, серву можно просто подключить, подать питание на регули (не забыть включить аппу) серва встанет в нужное положение, тогда уже и крепить её и крепить не намертво пока, вполне может получится, что придётся корректировать положение задней ВМГ …
В самой инструкции пока не разобрался, никак не могу найти толкового перевода.
есть две темы на этом форуме rcopen.com/forum/f123/topic236143 и rcopen.com/forum/f123/topic229200 там всё разжовано буквально на первых страницах…
Можно поподробнее про выставление сервы?
Видимо, имелось в виду выставление вала сервы в среднее положение с помощью сервотестера или приемника с передатчиком (общий принцип для приемника описан, например, здесь, а если у вас на Turnigy 9x установлена альтернативная прошивка er9x - то там кривые вида 0-50-50-50-100 (если точнее то - 100 0 0 0 +100) можно задавать для любого канала). Для удобства на вал сервы можно слегка насадить комплектную качалку, чтобы лучше видеть угол поворота вала.
Т.е. нужно выставить серву в среднее положение и только после этого втыкать в механизм поворота хвостового мотора (который тоже, разумеется, должен быть выставлен ровно.
Я сегодня тоже закончил собирать трикоптер шведа в версии 2.5 (для 2.6 тоже все есть, но пока еще карбоновые лучи жалко гробить…). Аппа - Turnigy 9x v.2, перепрошитая на er9x. Плата управления -HobbyKing Multi-Rotor Control Board V2.1 (Atmega168PA).
Из моего опыта - я использовал рекомендованные шведом винты GWS EP 10х4.7 (но заказал как левого, так и правого вращения), а для прошивки v1.6 kaptainkuk при запуске (увеличении газа) моторов без винтов (можно просто отсоединить по одному проводу от каждого мотора и не снимать винты), хвостовая серва сразу наклоняется от центра на правый борт, т.е. как бы пытается скомпенсировать поворот коптера по часовой стрелке, с учетом данного факта, я на передние моторы поставил винты, вращающиеся против часовой стрелки, а назад - по часовой (чтобы тоже немного скомпенсировать вращающий момент от передних винтов). Но, как уже упоминали, - это не столь важно, можно установить и все винты одного направления вращения.
Подключение моторов у меня такое (подсмотрел на фото у шведа): 1 - левый передний, 2 - правый передний, 3 - задний, 4 - хвостовая серва. Проводки питания от регулей не убирал (убирать рекомендовали на форуме), если приспичит, просто разверните разъемы (идущие от приемника) на каналах ELE и THR и насадите только на сигнальные (ближние к центру) штырьки, на AIL и RUDD - разворачивать разъемы не надо. На аппе я распределил каналы так: 1 - AIL, 2 - ELE, 3 - THR, 4 - RUD (прошивка er9x это позволяет), поэтому при подключении приемника обошелся только двумя шлейфами (один из них - в сигнальные контакты первых трех каналов).
При включении коптера серва сразу встает в среднее положение, - т.е. можно таким образом и установить ее правильно на коптер, наклоняется она уже, когда добавляешь газ (после арминга).
Но пока что я еще не смог откалибровать диапазон газа на всех регулях одновременно от платы (лишь по одному от приемника - получилось), но левый мотор у меня заметно сильнее тянет и коптер заваливает на правый борт. Моторы включаются почти одновременно. Если запустить на средний газ моторы и крепко держа коптер над головой, попытаться его наклонить/повернуть, - то все отрабатывается адекватно.
Буду копать форум дальше…
Кстати, пропы балансировал самодельным магнитным балансиром по конструкции отсюда.
магниты и шарики позаимствовал из детского магнитного конструктора GEOMAG, вал - из гвоздя подходящего диаметра.
Затачивал концы вала на конус дремелем, как можно точнее зажав вал в патроне обычной дрели (и включив ее на невысокой скорости).
Отверстия в пропах рассверливал простым сверлом по металлу подходящего диаметра (3,9-4,0 мм).
Металлическая мелкая стружка с магнитов убирается простым канцелярским скотчем.
nik25, спасибо за развернутый ответ!
а если у вас на Turnigy 9x установлена альтернативная прошивка er9x
Про прошивку читал, но пока ссыкатно как-то в передатчик лезть - не летал еще ни разу…
На аппе я распределил каналы так: 1 - AIL, 2 - ELE, 3 - THR, 4 - RUD (прошивка er9x это позволяет)
Для обычной прошивке Turnigy 9x вроде также?
Пропеллеры еще не балансировал, только рассверлил.
Про прошивку читал, но пока ссыкатно как-то в передатчик лезть
Все равно вам скоро придетстя туда лезть - паять резистор 5 кОм и резать дорожку (чтобы безгеморно подключать симуляторы), ставить подсветку экрана и батарейку или изменять mode1 на mode2…
А по поводу перепрошивки - я тоже долго не решался - но теперь вижу что делается все довольно просто и новые возможности софта аппы - впечатляют 😃 На второй своей Turnigy тоже перешью и комплект FrSky ее уже дожидается (она у меня для коптеров будет) 😃. Плюс у меня есть планы дополнительно вставить в нее 4-х канальный передатчик Spectrum для мелких вертолетов (на форуме это тоже было).
Только нужен паяльник на 20-25 Вт с тонким жалом и жидкий нейтральный флюс типа ЛТИ-120. Ну и аккуратность и внимательность.
Хотя… и со стандартной прошивкой Turnigy 9x тоже можно вполне спокойно летать.
Для обычной прошивке Turnigy 9x вроде также?
Указал, т.к. в прошивке er9x на первые каналы вертолетного шаблона по умолчанию вешаются CYC1, CYC2 и т.д.
Пропеллеры еще не балансировал
Лучше всего балансировать на магнитном балансире (советую не покупать, а сделать такой самому, как упоминалось выше).
Я пока не заморачивался с изолентой и скоблением пластика лопастей сверху/снизу/сбоку (для сохранения геометрии лопасти) - просто тупо отрезал ножницами по чуть-чуть с конца лопасти (оставляя кромку чуть скругленной в плане) до равновесия. На самой лучшей лопасти из 4-х - ничего не отрезал, на самой худшей отрезано около 8 мм.
А я раму нормальную сделал наконец.
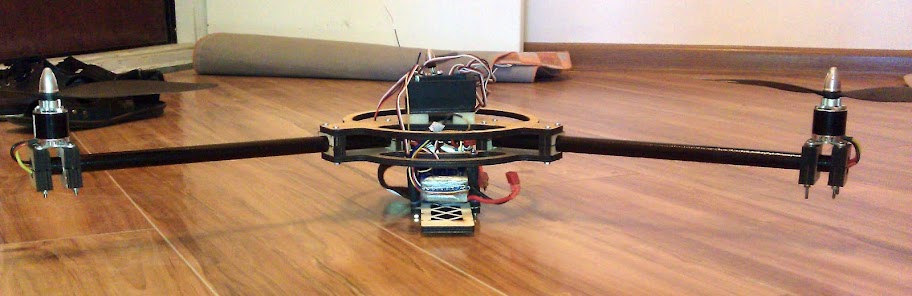


Шасси так и не придумал нормальное, поэтому батарейный отсек им и является пока что.
Вес с батареей 4S 5А 1380гр.
И наверное нужно лучи укорачивать, говорят стабильнее летает…