двигатели + винты= характеристики (для мультикоптеров и других ла)

Подойдет, если уложитесь в 1500 грамм полетного веса…
Подойдет, если уложитесь в 1500 грамм полетного веса…
Тоесть снаряженный квадрик должен весить не более 1,5кг? Я правильно вас понял?
1466г насчитал без проводов и с 1 батареей 2200мАч
ru.aliexpress.com/item/…/32333536476.html
Господа, совет нужен.
Собираю 500’ю раму по мотивам сушколета. Пришло время брать ВМГ и я заблудился в трех соснах. Очень хочется(не мотивированно) моторы SUNNYSKY V3508 580KV. Лучи еще не отрезал, могу позволить увеличить раму до 550.
Пока вытанцовывается вес рамы ~200-250. Батарейки хочу 4S2P10000.
Не перегнул ли я с моторами?
SUNNYSKY или аналоги дешевле?
Какие пропы брать для максимального времени полета(без тапкаФпол, по старивовски)?
Какие регуляторы этим моторам личше всего подходят?
У Вас неувязочка получается… Даже несколько…)
- В 500ю раму поместятся только 12" пропы.
- 580 кВ на мой взгляд маловато, для 12" пропов и того веса, что у Вас получится…
- 4S2P10000 это 4S 5000х2 параллельно? Это примерно 850 грамм веса.
- 4S для 580kV тоже маловато для 12", если только для 14".
В общем, если хотите именно SS V3508, то я рекомендовал бы 700кВ для 12" и батарейки 4S. Саму батарейку лучше ограничить в емкости, где нибудь до 3300х2…
Вот табличка тестовых данных с этим набором
Вообще, для мотора 3508-700 кВ считается самым эффективным 13" на 3S…
Посмотрите тесты у меня в дневнике, там есть тесты 3508-700 и альтернативного 3506-650 с пропами 12" и 14" на батарейках 3S и 4S… Может и найдете золотую середину…
Да, все тесты я проводил с таким регулятором… Да и летаю я, в основном, на таких…
Сергей спасибо за тесты.
Тут прикинул еще в кальке Sunnysky 2216-900
ecalc.ch/xcoptercalc.php?ecalc&lang=ru&cooling=goo…
Хоть моторки и потяжелее на 10г но тянут на 10х пропах получше чем Dys 880. На 11х конечно регули могут погореть, 20а стоят 😃
banggood.com/Sunnysky-X3108S-720KV-900KV-325W-Brus…
такие еще тяжелее но на 0.4 минуты эффективнее 😃
У Вас неувязочка получается… Даже несколько…)
…
В общем, если хотите именно SS V3508, то я рекомендовал бы 700кВ для 12" и батарейки 4S. Саму батарейку лучше ограничить в емкости, где нибудь до 3300х2…
…
Спасибо за совет. Ясности стало ещё меньше…
Куркулятор совсем не прав или я неверно интерпретирую его результат?
При прочих равных на 580 полетное время и удельная тяга больше, а элекрическая мощьность, температура и тяговооружённость меньше.
Я не специалист в этом вопросе, но интуиция подсказывает что выбор за 580.
Поднимать тяжести и быстро летать при сильном ветре мне не надо.
Развейте мои сомнения. Где я не прав?
Куркулятор совсем не прав
Может быть и прав, хотя это очень редко бывает… Может в нем уже изменилось что то к лучшему, давно им не пользуюсь…
Тут есть пара моментов, во первых, калькулятор оперирует не реальными данными по моторам, а табличками производителя, которые не всегда корректны. Во вторых, кальк не учитывает особенности контроллера.
Многие современные контроллеры резервируют часть мощности для стабилизации… Попробую объяснить в чем тут собака порылась… kV мотора, это количество оборотов холостого хода(без нагрузки) в минуту на 1 вольт напряжения питания. Более или менее стандартным для многофазных бесколлекторников постоянного тока считается, что максимальная механическая мощность достигается на диапазоне оборотов 0.5*kV*Vпит.*КПД ±20%, то есть на половине оборотов холостого хода с учетом КПД. Давайте посчитаем:
580 kV
290*14.8*0.8±20%=2750…4120 оборотов в минуту
700 kV
350*14.8*0.8±20%=3320…4980 оборотов в минуту
Вот , на мой взгляд, 2750 оборотов в минуту может не хватить для нормальной стабилизации… При снижении, например… Вы выигрываете всего 0.08 грамма на Ватт в эффективности (удельная тяга), зато можете серьезно потерять в стабильности.
…2750 оборотов в минуту может не хватить для нормальной стабилизации… При снижении, например…
Не претендуя на истинну, чисто академически…
При прочих равных, вес плюс винт, висение или снижение с одинаковой скоростью, будут происходить при одинаковых оборотах на валу в обоих случяях. Разница будет только в ширене рабочего диапазона оборотов винта. На малом КВ диапазон будет меньше за счет верхних пределов. “процент висения” будет немного выше у малого КВ.
Если верхний предел не интересен(медленно, не сильный ветер и без тяжестей), а эфективность у малого КВ чуть выше, то выбор очевиден, как мне кажется.
Да, резкий порыв ветра при снижении например, может выбрать все возможности малого КВ. Вопрос лишь в том, какой силы должен быть этот порыв… этого я не могу просчитать, не хватает опыта. Но в любом случае он должен быть больше чем максимальная скорость подъёма.
Я прав или в моих рассуждениях есть пробел?
батарейки 4S
Подскажите пожалуйста какие мне подойдут батареи на саннискай 3108 380кв, планирую пропы 13размера.
Еще где-то слышал что Li-fe батарейки лучьше по характеристикам, цена впринципе устраивает.
Есть у меня 4 аккумулятора таких, только по 3 банки. Думаю может их попробовать?
Получается 2,5ач*4банки*2 аккума параллельно получается 576г. Это нормально или много? Получится так или нет?
может кто подсказать. Вот я тестировал свои моторки
Стенд кустарный, но все же…
К сожалению во время теста я не догадался замерить тягу на 50% троттла
Если взять 11х4.5 MR на мультистарах, то имеем максимальный газ 858. Можно предположить что 50% газа это 429г. Ок.
Коптер весит 1300-1400. В весах села батарейка 😃 Так почему APM показывает газ висения 60-65%?
Кривая тяги практически линейная
Регули откалиброваны. Или АПМ резервирует 10-15% под стабилизацию и в итоге газ висения отображается заниженным?
Так почему
потому что тяга от оборотов зависит не линейно. у меня обычно значение 59% половина тяги
Или АПМ резервирует 10-15% под стабилизацию
Иногда даже больше… Что то связанное с MAX_TR_OUT… Я тоже сначала удивлялся, что один и тот же конфиг на АРМ летает на пару минут меньше, чем на назе… ПИДы надо бы более тщательно подбирать, но непонятно какие, аппарат висит ровно… А может и какие нибудь другие параметры надо менее агрессивными делать… В общем, надо разбираться, но лень…)
у меня обычно значение 59% половина тяги
То есть 59% троттла это 50% реальной тяги? Ну, наверное так и должно быть моторы же не запускаются прямо с 1000мкс, а где то с 1150, в Вашем случае будет с 1090… Я так понимаю этот процесс…)
Ну вот в табличке забиты измеренные параметры тяги. Когда врубаю альтхолд и смотрю показания текущих оборотов вижу ~60. Ну и в логах Th_out 56-65% в зависимости от заряда АКБ.
www.dropbox.com/s/…/parameters.complete?dl=0
Такие сейчас забита параметры в APM 3.2.1…
Что то связанное с MAX_TR_OUT
что то не нашел такого параметра… Нашел только
THR_MAX,1000.0
THR_MID,500.0
THR_MIN,130.0
Надо будет еще раз прогнать и поглядеть на показания тяги в зависимости от положения сервотестера…
выглядит это так

img-fotki.yandex.ru/…/0_c7441_b19c3836_orig.png
эт для всех пропеллеров так
а вот зависимость оборотов от сервосигнала почти ровная прямая
Так APM не может знать какие обороты у винтов. Может знать только какой уровень сервосигнала подается…
Нашел такую штуку
MOT_TCRV_ENABLE
I am looking for connection between MOT_TCRV and THR_MID.
I have Y6B with PixHawk (APM 3.2) setup with motors powerful enough to hover on 50% (or slight under) but it hover on 60%. So I benched motor and find that ESC is not linear (Afro with Simon ESC) and middle thrust is produced somewhere arround 60% of throttle.
So it looks that copter really hover on 50% or so thrust but I need send 60% of PWM max to get it.
What is recommended solution in this case ? Set MOT_TCRV_MIDPCT to 60 or THR_MID to 600 or linearize throttle output with transmitter throttle curve settings ?
groups.google.com/forum/#!topic/drones-discuss/0qI…
Как ответил Рэнди
I think it’s better to modify the THR_MID. This is a more tested solution.There is a throttle curve implemented in AC3.2 (and earlier versions) that tries to linearize the pwm-thrust curve but it’s a bit rough. Leonard is working on a better curve for AC3.3.
Видимо как раз из за этого фильтра все это и происходит… Советует ставить THR_MID и не париться…
Все таки были вы правы. АПМ не причем. Проверил сейчас только на весах. Сервотестером сначала откалибровал регуль. И измерил. 50% газа по сервотестеру (если он конечно не врет) 2212-980kv sunnysky (почти как мультистары) всего 220-230г тяги при токе ~2А по аналоговому амперметру… Где то так и выходит чтобы получить 300-350г тяги это 65-70% газа…
Продолжу монолог. Все таки нашел где собака зарылась. Так как у меня было настроен диапазон 3 канала от 1100 до 1900 как рекомендует(!) mission planner, то газ висения у меня был ~60% для 11х4.5 и 70% для 10х4.5 при полетном весе ~1250. В качестве эксперимента я решил расширить диапазон от 1000 до 2000. Естественно перекалибровав радио и регули. После этого газ висения по OSD и в логах у меня упал до 50 и 60 соотвественно. Замерил токопотребление - осталось прежним. То есть по сути изменения носят косметический характер. В логах и на экране я вижу более красивую и приятную цифру а на полетных характеристиках это почти никак не отразилось. Я не замерял максимальное токопотребление. Возможно изменения коснуться максимальных положений стиков и максимальной тяги. Но учитывая что коптер у меня носит подвес в этих режимах он не эксплуатируется.
Собственно логи
для 10х45
arduplotter.com/view/561480f3988c6d904b841202#alti…
для 11х45
arduplotter.com/view/561482ab988c6d904b841204#alti…
ну и в целом 11х45 чуть более экономичные пропы для 980 движков. Ток/время висения 14,63/13.12 против 15,35/12,51. Хотя разница конечно копейки.
Провел тесты мотора sdshobby.com/…/brushless-motor-5010-360kv-for-rc-q…
внешний диаметр реальный 47,5мм масса без проводов(выводы обмотки в термоусадках 6см гдето) 79гр. для сравнения rctimer5010 старый 360 kv 87гр без проводов.
у мотора приклеены синие какашки типо холодной сварки вроде как балансировка))вал тонки, подшипники мелкие. мой экземпляр имеет ощутимый такой люфт, но ниче так крутится. шумный он.
результаты как у rctimer5010 как еслиб kv был где то300

img-fotki.yandex.ru/…/0_c75ed_b24bc747_orig.png
оч даже хорошо, если учесть массу.
еще купил по 1 паре треугольных пропов от Quanum которые 1555 1655 и 1755. не знаю насколько они могут быть показательны. как известно все такого типа дешевые пропы кривые с разной степенью см. rcopen.com/forum/f123/topic345331/2183
вот 16дюймовый какой то не очень удачный. см (оригенал по клику на фото)
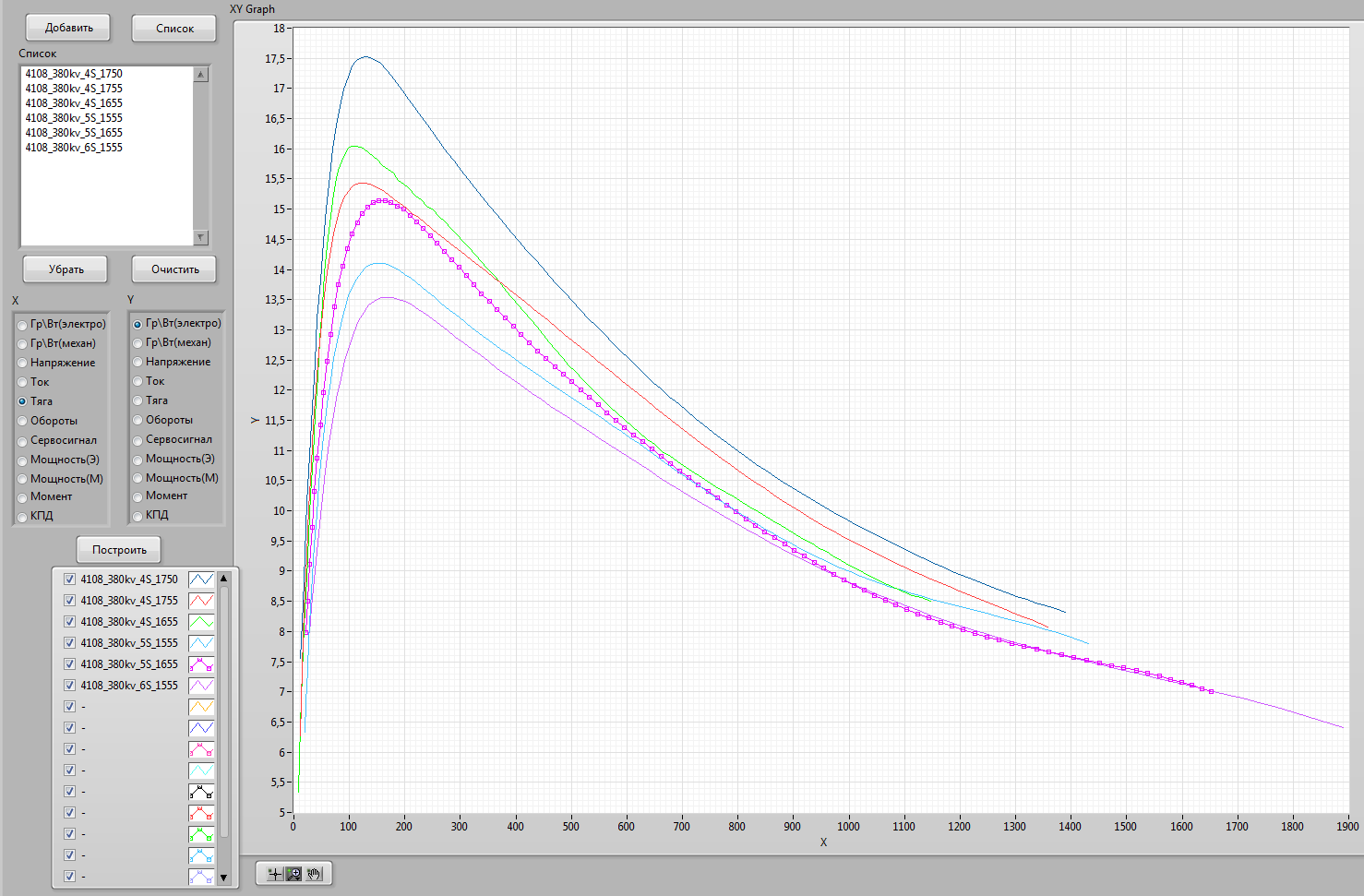
кпд какой прикольный )
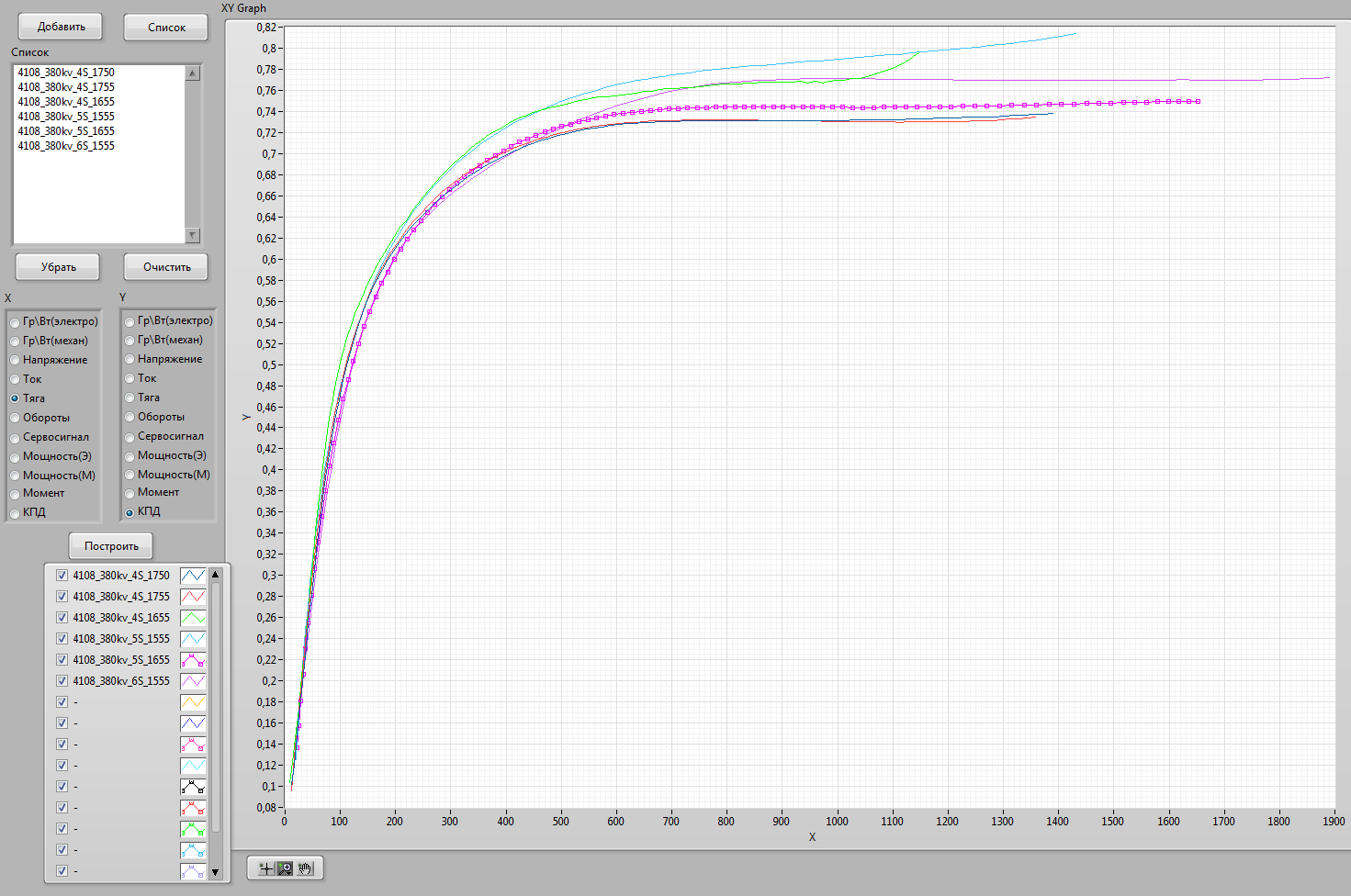
ну вроде ниче так брать можно) эти экземпляры на откровенный брак не похожи как встречаются у rctimer и tarot. собственная эффективность сравнима с хорошими экземплярами.
…Вот , на мой взгляд, 2750 оборотов в минуту может не хватить для нормальной стабилизации… При снижении, например… Вы выигрываете всего 0.08 грамма на Ватт в эффективности (удельная тяга), зато можете серьезно потерять в стабильности.
Почитав наш и паралельные форумы решил прислушаться к Вашим советам.
Буду брать SS3508-700, регуляторы которые вы посоветовали но с прошивкой biheli и винты APC MR 12 и 13. Большое спасибо за советы.
Хочу попробовать моторы Arris M3508 380kv. Как они? Щупал кто-нибудь?
Провел тесты мотора
Никита а вы свои результаты тестов выкладываете куда то в общий доступ чтоб можно было полистать все тесты?