MultiWii

И так ребят, описываю: Всё сделал вращение движков правильное, винты правильно установил, питаю батареей 3S, и так, питание включаю всё норм ригули дают знак, зачем ARM и по чуть чуть газу, на 15 % 2 движка крутятся приблизительно одинаково, на 30 3 движка, на 50 все 6 на по звуку понятно что с разными оборозами. Также вопрос USB вчера отломал как с GUI связатся, а так же через что можно, и как прошивку заного залить есть шансы что с прошивкой чтото не то, сейчас 2.2 Multiwii стоит. на 50 все движки работают, на 70 4 движка, на 90 2 движка, вот так, заранее благодарю за ваши мнения
и 2 движка сами обороты набирают
можно через платку FTDI связываться и заливать прошивку или просто блютуз для связи вполне удобная штука
вот платка есть, а куда 5V GND TX RX включать на плате?
Форумчане, искал, гуглил, но так и не не нашел инфы, подскажите плз
Сейчас настраиваю PIDы для Altitude (высота). Прошивка 2.2. С дефолтными PIDами коптер был похож на прыгающий надувной мяч: вверх-вниз, вверх-вниз… 😃
Если я правильно понял throttle MID - это положение стика газа, в котором коптер должен зависнуть в воздухе. Т.е. если указанно 0,5, то при установке стикера в центр коптер теоретически держать высоту. Есть ли возможность в этом положении стика активировать режим удержания высоты?
Есть еще параметр throttle EXPO, не могу понять за что он отвечает.
вот платка есть, а куда 5V GND TX RX включать на плате?
Ну ведь самую малость осталось пошевелить серым веществом
USB-UART подключается к serial 0, рядом с перемычкой есть порт для подключения,
так на Serial 0 надо будет ножки напоять, ну это уже завтра =D
можно через платку FTDI связываться и заливать прошивку или просто блютуз для связи вполне удобная штука
На мозгах все подписано, на USB-UART тоже.
Все припоял, подключаю USB-uart и serial 0 загружаю прошибку пишит Timaout ошибка и всё, GUI пишит проверте ком порт, подключил TX RX GND 5V и все
проверит айцилографом ШИМ с контроллера всё норм, затем проверил СИГНАЛ с регуляторов там вообще не понятное что-то, может дело в регуляторах, регуляторы banned link может их прошить?
На ютубе все прошивают Simonk firmware
Форумчане, искал, гуглил, но так и не не нашел инфы, подскажите плз
Сейчас настраиваю PIDы для Altitude (высота). Прошивка 2.2. С дефолтными PIDами коптер был похож на прыгающий надувной мяч: вверх-вниз, вверх-вниз… 😃
Если я правильно понял throttle MID - это положение стика газа, в котором коптер должен зависнуть в воздухе. Т.е. если указанно 0,5, то при установке стикера в центр коптер теоретически держать высоту. Есть ли возможность в этом положении стика активировать режим удержания высоты?
Есть еще параметр throttle EXPO, не могу понять за что он отвечает.
Правильно понял, throttle MID положение газа при котором коптер висит, лучше если пульт показывает цифровое значение как в er9x турниге например что бы более менее точно выставить. throttle EXPO это кривая газа, можно покрутить для плавности удержания высоты , но мне удобнее прям на аппе подкрутить под конкретную раму.
Все припоял, подключаю USB-uart и serial 0 загружаю прошибку пишит Timaout ошибка и всё, GUI пишит проверте ком порт, подключил TX RX GND 5V и все
проверит айцилографом ШИМ с контроллера всё норм, затем проверил СИГНАЛ с регуляторов там вообще не понятное что-то, может дело в регуляторах, регуляторы banned link может их прошить?
На ютубе все прошивают Simonk firmware
Попоробуй поменяй TX RX местами(должно быть TX RX = RX TX ) , а регули прошивать обязательно, при чем я лично всегда удаляю возможно калибровки регулей, что бы у них всегда были одинаковые настройки, тогда все стартует одновременно. но для этого прошивку придется пересобрать, там буквально пару тыков мышкой.
На всякий случай если дойдет до этого, в файле tgy.asm в одной строке меняем с 1 на 0 .equ RC_CALIBRATION = 1 ; Support run-time calibration of min/max pulse lengths, это все.
Поменял местами TX RX заработал GUI, прошивка такая же ошибка, щас вот буду учиться регуляторы прошивать
Поменял местами TX RX заработал GUI, прошивка такая же ошибка, щас вот буду учиться регуляторы прошивать
припаяй reset, заработает и прошивка
Либо reset либо DTR вывод кок он обзывается на конвертере
Всё прошивку починил спасибо ребят, щас буду учиться прошивать регуляторы, видео посмотрел там терпоусадку надризают и что-то в регулятор заливают с SPI - USB
прогроматор для авр микроконтроллеров обычно USB ASP а так кому что угоднее
Правильно понял, throttle MID положение газа при котором коптер висит, лучше если пульт показывает цифровое значение как в er9x турниге например что бы более менее точно выставить. throttle EXPO это кривая газа, можно покрутить для плавности удержания высоты , но мне удобнее прям на аппе подкрутить под конкретную раму.
Дмитрий, спасибо за ответ. Хочу еще уточнить.
Как-то не получается у меня висеть на 50% газа… Я не уверен, что правильно понимаю throttle EXPO.
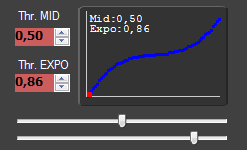
Поправте меня, если я не прав. Судя по графику, если стик газа находится возле центра, газ будет плавный, так как прямая на графике более горизонтальная. И соответственно, когда стик газа находится внизу или ближе к верхней границе - газ более чувствительный (прямая более вертикальная)
Дмитрий, спасибо за ответ. Хочу еще уточнить.
Как-то не получается у меня висеть на 50% газа… Я не уверен, что правильно понимаю throttle EXPO.Поправте меня, если я не прав. Судя по графику, если стик газа находится возле центра, газ будет плавный, так как прямая на графике более горизонтальная. И соответственно, когда стик газа находится внизу или ближе к верхней границе - газ более чувствительный (прямая более вертикальная)
Все верно, там где полка , на стик реакция будет плавнее, просто еще нужно учитывать что полка эта смещается в зависимости от заряда батареи, соответсвенно экспоненту можно плавнее сделать , и проследить где находится точка висения на полном акке, и где на разряженом, полученное среднее арифметическое и вбить в thr. MID, З.Ы, я больше 65% экспоненту никогда не выкручивал.
Изначально стояли такие настройки PID:
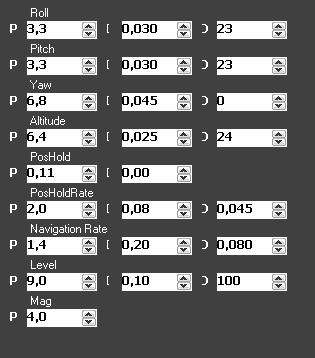
В полете есть асциляции, но какието хаотичные, пробовал Изменять значение Р на Roll и Pitch:
P=1 - Так же
Р=20 - асциляции стали не хаотичными но по амплитуде такие же остались (небольшие, летать можно но на видео заметно)
Проверял в помещении, может поэтому.
Я так понимаю что значения I и D не сильно влияю на асциляции и они должны практически полностью устранится редактированием P? Ведь I и D влтияют на скорость и чувствительность возврата коптера к горизонту?
На принтскрине большой thr.expo указан для более большого прогиба графика 😃
проследить где находится точка висения на полном акке, и где на разряженом, полученное среднее арифметическое и вбить в thr. MID
с thr.expo я разобрался, и с thr.mid вроде тоже. Нужно будет замерять положения стика и вбить это значения в thr.mid. Хотя я был уверен, что этот параметр (thr.mid) наоборот указывает, где нужно удерживать коптер.
И еще вопрос, гуглил по форуму, так и не смог найти ответ. В настройках GUI есть PIDы для Level-а. Что они обозначают?
Изначально стояли такие настройки PID:
В полете есть асциляции, но какието хаотичные, пробовал Изменять значение Р на Roll и Pitch:
P=1 - Так же
Р=20 - асциляции стали не хаотичными но по амплитуде такие же остались (небольшие, летать можно но на видео заметно)Проверял в помещении, может поэтому.
Я так понимаю что значения I и D не сильно влияю на асциляции и они должны практически полностью устранится редактированием P? Ведь I и D влтияют на скорость и чувствительность возврата коптера к горизонту?
В конфиге подбери значения фильтра для акселя и гиры, обычно это 20гц но иногда подходят и другие. С подергиваниями будет попроще. А вообще все нужно настраивать на улице ибо в комнате множество потоков которые вносят хаотические помехи вот и дергается)))))
/* MPU6050 Low pass filter setting. In case you cannot eliminate all vibrations to the Gyro, you can try
to decrease the LPF frequency, only one step per try. As soon as twitching gone, stick with that setting.
It will not help on feedback wobbles, so change only when copter is randomly twiching and all dampening and
balancing options ran out. Uncomment only one option!
IMPORTANT! Change low pass filter setting changes PID behaviour, so retune your PID’s after changing LPF.*/
//#define MPU6050_LPF_98HZ
//#define MPU6050_LPF_42HZ
#define MPU6050_LPF_20HZ
//#define MPU6050_LPF_10HZ // Use this only in extreme cases, rather change motors and/or props
Как-то не получается у меня висеть на 50% газа…
При каком положении джойстика будет висеть Ваш конретный девайс завсит не о того, что Вы в ГУИ настроили, а от его веса и его ВМГ. Т.е. ставьте линейную зависимость , везде, медленно добавляйте газ пока почувствуете, что взлетает и пропорционально этому значению указывайте в thr MID. А уже потом ставьте экспоненту.
Вопрос ребят, а я могу прошить регулятор не через USB ISP ( я его в городе найти не могу), а через USB TTL? распиновка 3.3 V, RST, TXD, rxd, Gnd, 5v.
Если в регуляторе прошит бутлодер, то да. В остальных случаях зависит от чипа на котором собран, для большинства девайсев, ответ, нет. Но в любом случае нужно будет выводить дополнительные сигналы.
p.s. По прошивки регуляторов отдельная тема на форуме.
При каком положении джойстика будет висеть Ваш конретный девайс завсит не о того, что Вы в ГУИ настроили, а от его веса и его ВМГ. Т.е. ставьте линейную зависимость , везде, медленно добавляйте газ пока почувствуете, что взлетает и пропорционально этому значению указывайте в thr MID. А уже потом ставьте экспоненту.
Разобрался, спасибо. Изначально я думал что это я указываю в каком положении стикера коптер должен удерживать высоту.
Форумчане, подскажите плз еще по такому вопросу. В настройках GUI есть PIDы для Level-а. Что они обозначают?