MultiWii

Дмитрий, спасибо за ответ. Хочу еще уточнить.
Как-то не получается у меня висеть на 50% газа… Я не уверен, что правильно понимаю throttle EXPO.Поправте меня, если я не прав. Судя по графику, если стик газа находится возле центра, газ будет плавный, так как прямая на графике более горизонтальная. И соответственно, когда стик газа находится внизу или ближе к верхней границе - газ более чувствительный (прямая более вертикальная)
Все верно, там где полка , на стик реакция будет плавнее, просто еще нужно учитывать что полка эта смещается в зависимости от заряда батареи, соответсвенно экспоненту можно плавнее сделать , и проследить где находится точка висения на полном акке, и где на разряженом, полученное среднее арифметическое и вбить в thr. MID, З.Ы, я больше 65% экспоненту никогда не выкручивал.
Изначально стояли такие настройки PID:
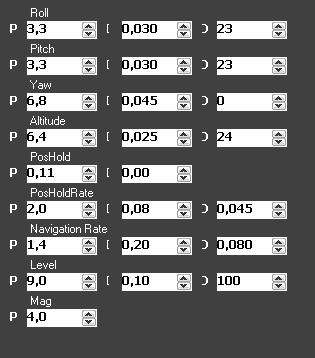
В полете есть асциляции, но какието хаотичные, пробовал Изменять значение Р на Roll и Pitch:
P=1 - Так же
Р=20 - асциляции стали не хаотичными но по амплитуде такие же остались (небольшие, летать можно но на видео заметно)
Проверял в помещении, может поэтому.
Я так понимаю что значения I и D не сильно влияю на асциляции и они должны практически полностью устранится редактированием P? Ведь I и D влтияют на скорость и чувствительность возврата коптера к горизонту?
На принтскрине большой thr.expo указан для более большого прогиба графика 😃
проследить где находится точка висения на полном акке, и где на разряженом, полученное среднее арифметическое и вбить в thr. MID
с thr.expo я разобрался, и с thr.mid вроде тоже. Нужно будет замерять положения стика и вбить это значения в thr.mid. Хотя я был уверен, что этот параметр (thr.mid) наоборот указывает, где нужно удерживать коптер.
И еще вопрос, гуглил по форуму, так и не смог найти ответ. В настройках GUI есть PIDы для Level-а. Что они обозначают?
Изначально стояли такие настройки PID:
В полете есть асциляции, но какието хаотичные, пробовал Изменять значение Р на Roll и Pitch:
P=1 - Так же
Р=20 - асциляции стали не хаотичными но по амплитуде такие же остались (небольшие, летать можно но на видео заметно)Проверял в помещении, может поэтому.
Я так понимаю что значения I и D не сильно влияю на асциляции и они должны практически полностью устранится редактированием P? Ведь I и D влтияют на скорость и чувствительность возврата коптера к горизонту?
В конфиге подбери значения фильтра для акселя и гиры, обычно это 20гц но иногда подходят и другие. С подергиваниями будет попроще. А вообще все нужно настраивать на улице ибо в комнате множество потоков которые вносят хаотические помехи вот и дергается)))))
/* MPU6050 Low pass filter setting. In case you cannot eliminate all vibrations to the Gyro, you can try
to decrease the LPF frequency, only one step per try. As soon as twitching gone, stick with that setting.
It will not help on feedback wobbles, so change only when copter is randomly twiching and all dampening and
balancing options ran out. Uncomment only one option!
IMPORTANT! Change low pass filter setting changes PID behaviour, so retune your PID’s after changing LPF.*/
//#define MPU6050_LPF_98HZ
//#define MPU6050_LPF_42HZ
#define MPU6050_LPF_20HZ
//#define MPU6050_LPF_10HZ // Use this only in extreme cases, rather change motors and/or props
Как-то не получается у меня висеть на 50% газа…
При каком положении джойстика будет висеть Ваш конретный девайс завсит не о того, что Вы в ГУИ настроили, а от его веса и его ВМГ. Т.е. ставьте линейную зависимость , везде, медленно добавляйте газ пока почувствуете, что взлетает и пропорционально этому значению указывайте в thr MID. А уже потом ставьте экспоненту.
Вопрос ребят, а я могу прошить регулятор не через USB ISP ( я его в городе найти не могу), а через USB TTL? распиновка 3.3 V, RST, TXD, rxd, Gnd, 5v.
Если в регуляторе прошит бутлодер, то да. В остальных случаях зависит от чипа на котором собран, для большинства девайсев, ответ, нет. Но в любом случае нужно будет выводить дополнительные сигналы.
p.s. По прошивки регуляторов отдельная тема на форуме.
При каком положении джойстика будет висеть Ваш конретный девайс завсит не о того, что Вы в ГУИ настроили, а от его веса и его ВМГ. Т.е. ставьте линейную зависимость , везде, медленно добавляйте газ пока почувствуете, что взлетает и пропорционально этому значению указывайте в thr MID. А уже потом ставьте экспоненту.
Разобрался, спасибо. Изначально я думал что это я указываю в каком положении стикера коптер должен удерживать высоту.
Форумчане, подскажите плз еще по такому вопросу. В настройках GUI есть PIDы для Level-а. Что они обозначают?
Изначально я думал что это я указываю в каком положении стикера коптер должен удерживать высоту.
Что то подобное будет, как я понимаю, с прошивкой “маховий”.
Ребят, всё проверил еще раз, ШИМ с контроллера идёт нормальный, значит дело в регуляторах, тогда вопрос реально ли регуляторы Multistar 30a продаются с говняной прошивкой или нет? Когда подключаю регулятор в приемник и колибрую всё нормально все регуляторы по отдельности работают одинаково при малых оборотах и на максимуме, а когда все включаю в контроллер всё печально
И еще соеденяю serial 0 с usb TTL tx-tx, rx-rx, dtr-rst и питание, и пытаюсь залить прошивку вылазиит ошибка time out, меняю местами tx и rx тоже самое, подскажите, плата multiwii PRO
Когда подключаю регулятор в приемник и колибрую всё нормально все регуляторы по отдельности работают одинаково при малых оборотах и на максимуме, а когда все включаю в контроллер всё печально
Арминг работает? Проверял через гуи?
TTL tx-tx, rx-rx,
Попробуйте Rx->Tx, Tx->Rx
Арм работает, проперллеры крутятся но не вместе и некоторые не сразу начинают крутится, Пробовал Rx->Tx, Tx->Rx. При малых оборотах крутится 3 двигателя и 50% все крутятся, при 100 крутятся 2, также при посивном стики моторы сами набирают обороты
Добрый день. Не знаю уж где спрашивать, везде удаляют. Может тут помогут 😃
Собрал я квадрик, прошил, но лететь он отказался. Получается следующее: пропеллеры крутятся не одинаково, причем один из них значительно медленнее.
Выглядит это вот так: 
Скрин получен при прогоне без пропеллеров, аппарат стоит на ровной поверхности.
При этом на максимальном газу стабильно работает только задний правый движок. Передние, как видно, до него по мощности не дотягивают и циферки у них прыгают. Ну а задний левый вообще не тянет. В результате, естественно, квадр при взлете переворачивается.
Подскажите, как это исправить, куда копать?
З.Ы. Конфигурация такая:
Turnigy 6X FHSS 2.4ghz Transmitter and Reciever (Mode 1)
Slow Fly Electric Prop 1045R SF RH Rotation (4 pc)
Slow Fly Electric Prop 1045SF (4 pc)
Q450 Glass Fiber Quadcopter Frame 450mm
MultiWii MicroWii ATmega32U4 Flight Controller USB/BARO/ACC/MAG
ZIPPY Flightmax 4000mAh 3S1P 20C
Turnigy L2215J-900 Brushless Motor (200w)
Регули Simonk
А регуляторы калибровали?
Читаем ФАК, особенно про настройку аппы
Добрый день. Не знаю уж где спрашивать, везде удаляют. Может тут помогут
Достаточно прочитать один раз rcopen.com/forum/f134/topic264540 и сразу станет понятен принцип обсуждений на форуме.
По сабжу, если все регули откалиброваны одинково, то не стоит обращать внимание, а ставить пропеллеры и попробывать взлететь.
Это в мултивие нормально, что вроде бы все моторы гуляют в разнобой, в полете все будет отлично наверняка.
Читаем ФАК, особенно про настройку аппы
По этому ФАКу все и делал. Проблема в том, что у меня аппа без мониторчика. Как я понял, она не настраиваемая.
А регуляторы калибровали?
При прошивке мозгов раскомментировал строчку, отвечающую за калибровку. Регули что-то пропищали, потом обратно закомментировал.
По сабжу, если все регули откалиброваны одинково, то не стоит обращать внимание, а ставить пропеллеры и попробывать взлететь.
Это в мултивие нормально, что вроде бы все моторы гуляют в разнобой, в полете все будет отлично наверняка.
Взлетать пробовал - переворачивается. Да и медленный пропеллер видно невооруженным глазом.
Кстати, пробовал переключать регули. Все равно медленным остается задний левый, так что дело не в них наверно.
Проблема в том, что у меня аппа без мониторчика. Как я понял, она не настраиваемая
но надо как то каналы выправить до серединок
триммерами например
смотря в ГУИ
А регуляторы калибровали?
При прошивке мозгов раскомментировал строчку, отвечающую за калибровку. Регули что-то пропищали, потом обратно закомментировал.
У меня не получилось нормально откалибровать регули через контроллер. Крутились как попало. Сделал по старинке через резветвитель напрямую с 3го канала приемника на все регули. Помогло
Каналы до серединок выправил, через приемник регули откалибровал. Запустил в пропеллерами. Результат: на глаз разницы в скорости двигателей теперь нет, но по ГУИ все равно задний левый не дотягивает. Завтра повезу на дачу, попробую взлететь.