Делаем раму коптера своими руками. Обмен опытом.

а зачем? наскок помню все регули по умолчанию работают от 2 до 4S
Я имел ввиду смену регулей с 12А на 20, токи то при 4S будут другие и мои 12 амперные поджарятся.
токи то при 4S будут другие
Могу заблуждаться, но при увеличении напруги ток должОн уменьшиться (при равной мощности)
токи то при 4S будут другие и мои 12 амперные поджарятся.
при 4S токи наоборот уменьшатся.
причем я выше писал ток мотора при нагрузке 400г на мотор.
у меня при полном газе гекса жрет макс 46А суммарно, примерно 6А на моторку (правда это тестилось на маховие в альтхолде, там макс скорость подъема ограничена 3м/с)
Посмею предположить, что максимальные токи могут и повысятся… так как при максимальном газе, с 4S тяга больше КПД меньше, и если это учесть то при полном газе ампер может и не хватить, на висении то конечно ампер меньше будет жрать.
От 11-12 винтов отказался из за их размера - в кадр будут лезть,
Странный подход к ЛА, вы или летаете и снимаете, или снимаете и не летаете… Вам выбирать…
Что касается попадания в кадр, то лечится смещением камеры или уменьшением угла съёмки…
так как при максимальном газе, с 4S тяга больше КПД меньше, и если это учесть то при полном газе ампер может и не хватить
Это не так, моторки крутятся изначально быстрее и винту крутиться легче потому как шаг меньше нужен для висения, следовательно и в момент резких эволюций нагрузка на регуль будет меньше.
и винту крутиться легче потому как шаг меньше
При больших скоростях винта, сопротивление воздуха растёт, при чём не линейно. и кто говорил о изменении шага? при том же винте и моторе, но на другом аккомуляторе, ток я думаю будет всё же больше. но без эксперимента не обойтись.
тяга больше КПД меньше
Вы наверное говорите о другом КПД, я о КПД на удельный вес, и как раз КПД при повышении напряжения выше, так как тяга больше, а вес установки прежний, но вот время висения оценить сложнее, но удельная мощность примерно такая же…
и кто говорил о изменении шага? при том же винте и моторе, но на другом аккомуляторе, ток я думаю будет всё же больше. но без эксперимента не обойтись.
Потому что для меньших оборотов надо ставить больший винт и/или больший шаг.
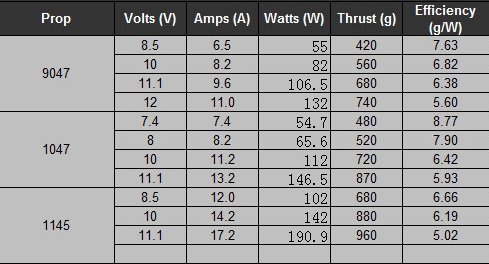
Зачем эксперимент, если таблица к мотору уже и есть экспериментальные данные… Просто их нужно понимать…
гекса жрет макс 46А суммарно, примерно 6А на моторку
А на что ещё 10 ампер уходит? потому как 6А х 6 шт = 36 А суммарного тока.
Предположу, что передатчик видео на 120 ватт для передачи видео на 1000 км или подвес для Canon 5 D))
Вы наверное говорите о другом КПД, я о КПД на удельный вес, и как раз КПД при повышении напряжения выше, так как тяга больше, а вес установки прежний,
Посмотрите таблицы, эффективность мотора падает при повышении напряжения.
Принял решение о гексе, где будет меньшая тяга на двиг и он будет работать в экономном режиме+стабильность полета. Гекса под некст есть, с 5 А акком 3 S летает 10 минут железно, до звонка 14 минут.
По мне так лишних два мотора и дополнительные узлы отказа…
Сейчас есть довольно не плохие моторки, которые лихо поднимают/ работают на квадриках… А время полёта, для коптера с хорошими АКБ можно и до получаса догнать…
Посмотрите таблицы, эффективность мотора падает при повышении напряжения.
Не верно истолковал. Эффективность падает, если мотор винт крутить не может, поэтому для каждого винта и напряжения 3S и 4S свой режим. И мы же рассматриваем не потребление как таковое а оптимальный набор компонентов…
Да, можно получить лучшие показатели в висении, но стоит немного порулить и уже видно, что отклик слабы и летать на таком слоне тяжело…
Да и пропеллеры разные, одни мягкие, другие жёсткие. Мягки очень плохо откликаются на резкое увеличение оборотов и часть энергии уходит в стороны из-за изгиба…
Не стоит забывать про нагрев…
Странный подход к ЛА
Почему странный? Сами же писали -“Зачем эксперимент, если таблица к мотору уже и есть экспериментальные данные.” Выше я давал ссылку по таблице с тестами мотора, оптимум к ним - 10х3.8 с 3S.
А по поводу меньшего угла на камере - тут у меня с Прошкой Сильвер не заладилось, при меньших углах начинает сильно шуметь, да при 30к/с. плавность картинки не та. А для того чтобы винты не лезли в кадр при 170 градусах нужно до неприличия выдвигать вперёд подвес с камерой, да и не безопасно это для них.
выдвигать вперёд подвес с камерой, да и не безопасно это для них.
Можно же ещё ниже выше… Или хочется плосколёт иметь без шасси…
оптимум к ним - 10х3.8 с 3S.
Комфортный полёт это не только минимальные затраты энергии, ещё и отклик, управляемость и грузоподъёмность нужны…
Выше я давал ссылку по таблице с тестами мотора, оптимум к ним - 10х3.8 с 3S.
эт по данным продавца… а по данным кучи народа на форуме для 800кв оптимальными будут 11-12-е винты на 3S, на 4S - 10х4.7
а по данным кучи народа на форуме для 800кв оптимальными будут 11-12-е винты на 3S, на 4S - 10х4.7
вы не сравнивайте “мягкое с тёплым”… нам нужна тяга и достаточное время полёта при выбранных АКБ и даже от расположения комплектующих на коптере будет разный выхлоп.
А сравнивать тоже нужно на высоте, потому как над поверхностью граудэффект будет всё портить…
эт по данным продавца… а по данным кучи народа на форуме для 800кв оптимальными будут 11-12-е винты на 3S, на 4S - 10х4.7
Если Вы говорите о foxtechfpv.com/sunnysky-221612-kv800-motor-p-383.h… то к ним действительно лучше 11-12-е винты, что сходится с их таблицей, у меня то эти buddyrc.com/sunnysky-v2216-12-800kv-ii-brushless-m… и статистики по ним пока мало.
Вообщем всё равно собирался гексу строить, буду до заказывать еще пару моторов.
Вообщем всё равно собирался гексу строить, буду до заказывать еще пару моторов.
Так зачем, если можно АКБ 4S поставить и вперёд…
А для того чтобы винты не лезли в кадр при 170 градусах нужно до неприличия выдвигать вперёд подвес с камерой, да и не безопасно это для них.
Странно, 6 лучей это меньше угол между лучами или сильно выдвинутая вперёд камера…
И АКБ нужно хотя бы 4к÷5000 мА можно и с 3S (т.е. ваши два в параллель, конечно это будет хуже чем один на 5Ач)
Странно, 6 лучей это меньше угол между лучами или сильно выдвинутая вперёд камера…
При гексе можно ставить более “тяжёлые” т.е. высокие шасси и подвес опустить ниже, и ничего лезть в кадр не будет.
При гексе можно ставить более “тяжёлые” т.е. высокие шасси и подвес опустить ниже
Видел ролик, так там шасси с собой не возят, а оставляют на земле… и таскает эта штука “зеркалку” в полном фарше…
Но предположу, что аппаратная часть должна быть крайне чёткой и точной.
На крайняк можно и руками поймать, а взлетать с наземной стартовой площадки… Ничего лучше не знаю пока…
Если Вы говорите о www.foxtechfpv.com/sunnysky-2...tor-p-383.html то к ним действительно лучше 11-12-е винты, что сходится с их таблицей, у меня то эти www.buddyrc.com/sunnysky-v221...ess-motor.html и статистики по ним пока мало.
Я, конечно, извиняюсь, что встреваю в вашу дискуссию, но в чем разница между этими двигателями?
Цвет краски, которой окрашены двигатели?
Имею эти двигатели foxtechfpv.com/sunnysky-221612-kv800-motor-p-383.h…, стоят на композитной раме, (можно глянуть в теме о композитных рамах) так вот, перед установкой, проводил тест на тягу и потребляемый ток, с разными винтами, а в частности, 10Х4.5 карбон, 11Х4.7 карбон и 12Х3.8 так же карбон, все винты с rctimer.com.
Показания, совпали на 99% с таблицей buddyrc.com/sunnysky-v2216-12-800kv-ii-brushless-m…, за исключением показаний винта 10Х3.8, такого у меня не оказалось в наличии, только 10Х4.5, и то разница, всего в 10-15г. в большую сторону на разном уровне газа.
Так, что, это одинаковые двигатели, и таблица buddyrc.com/sunnysky-v2216-12-800kv-ii-brushless-m… боле правдивая и достоверная.
Цвет краски, которой окрашены двигатели?
угу, практически так и есть…
не забываем что у фокстеча для 11 и 12-х винтов указан неиспользуемый нами шаг
Спасибо. закажу на пробу и 11x4.7 Carbon CW/CCW, под 3s.
у меня кстати с 11-ми тянуло вяловато, ховер на ~65 газа и ~9 мин полетного на 5А батарее. на 4 банках 5,7А ховер на 50% и летает ~16-17мин