А давайте обсудим Arducopter - APM

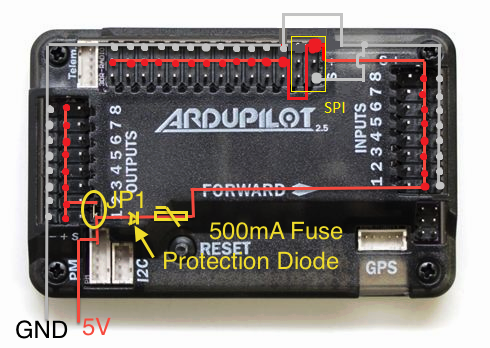
Ребят, прошу развеять сомнения по набившему оскомину вопросу питания APM 2.5.2. Имею UMEC с RCTimer - тот, который 5/6V, 5A. В режиме “5V”, по мультиметру (без нагрузки) он отдает 5.31 V. Перечитал кучу инфы по данному вопросу и сложилось впечатление, что это нормальное напряжение для питания через Inputs без JP1, т.к. < 5.5V (однако, настораживают указания “безопасного коридора” 4.75V - 5.25V). OSD пока питать не буду от APM. Подтвердите или опровергните мои догадки! 😃
Спасибо!
Ребят, прошу развеять сомнения по набившему оскомину вопросу питания APM 2.5.2. Имею UMEC с RCTimer - тот, который 5/6V, 5A. В режиме “5V”, по мультиметру (без нагрузки) он отдает 5.31 V. Перечитал кучу инфы по данному вопросу и сложилось впечатление, что это нормальное напряжение для питания через Inputs без JP1, т.к. < 5.5V (однако, настораживают указания “безопасного коридора” 4.75V - 5.25V). OSD пока питать не буду от APM. Подтвердите или опровергните мои догадки! 😃
Спасибо!
Мое мнение это поставить нормальный ВЕК , который дает ровно 5в и запитать АРМ со стороны выходов на моторы. С разъема Power питание идет через диод и предохранитель и после их у меня было падение 0.6в и пульсации
Моторы греются точно так же. Х2212-13 980кв Санни скай. Регули Афро 30А. Может дело в регулях?
У меня такие же моторы, регули афро 20а, винты 10x4.5, питание 3s, не греется ничего
Подскажите, после прошивки регуляторов плюш 30а прошивкой blhelli их надо калибровать на ардукоптере и если да, то как?
Газ в макс
подаем питание
диоды мырг мырг мырг по очереди
питание выкл
питание вкл
диоды мыргают
регули пик пик
газ в ноль
регули пик шлеп бум
После этого пробуем газовать моторы должны синхронно стартовать.
PS: Если опыта нет винты нужно снять 😃
Мое мнение это поставить нормальный ВЕК , который дает ровно 5в и запитать АРМ со стороны выходов на моторы
если перемычка не стоит то это ерунда
не со стороны выходов, а со стороны входов или разъёмов A1,A2…An не путайте народ
Периодически перегружается APM, такое стало происходить после установки OSD.
Питание подаю раздельное предварительно распаяв все мостики, но заметил, что
Прозванивая данный мостик есть замыкание. (Фото не мое, привел для наглядности)
Мостик распаян 100% (после распайки проходил лезвием и смотря на свет видно что контакта нет.)
Где может еще соединяться две земли???
Подтвердите или опровергните мои догадки!
без OSD будет нормально, но лучше всё же 5v или чуток меньше я питаю от 4.9
Периодически перегружается APM, такое стало происходить после установки OSD.
Питание подаю раздельное предварительно распаяв все мостики, но заметил, чтоПрозванивая данный мостик есть замыкание. (Фото не мое, привел для наглядности)
Мостик распаян 100% (после распайки проходил лезвием и смотря на свет видно что контакта нет.)
Где может еще соединяться две земли???
Земли разомкнуть можно только если распилить плату к чертям пополам 😃
Так как цифровая часть MAX имеет общую землю с аналоговой.
Земли разомкнуть можно только если распилить плату к чертям пополам 😃
Так как цифровая часть MAX имеет общую землю с аналоговой.
Правильно ли я понимаю что во всей электросистеме квадрокоптера замля одна? Т.Е. если прозванивать минус у аккумулятора и любой другой минус…APM, OSD,FPV,3dr power module то должн быть контакт?? Если так, то у меня все нормально, но почему вырубается APM а в логах ошибка FAILSAFE BATT не понимаю ((((( Хотя он отключен и аккум новый.
будет нормально, но лучше всё же 5v
Спасибо, буду для начала так питать.
А есть ли готовые проверенные UBEC-и (ссылка?) на 5V ровно? 😃
Вроде как RCTimer эти (RCTimer Low Noise 5A 5V/6V switching UBEC) специально под APM продает - это такой разброс напряжения у них между экземплярами и/или они просто не парятся особо? 😃 А может, я как-то не так замеры провожу (подаю 12V от сетевого БП на 1A и просто меряю на выходе мультиметром) или под нагрузкой он “штатно” проседает до нужного уровня?
А есть ли готовые проверенные UBEC-и (ссылка?) на 5V ровно?
Алексей Козин провел исчерпывающие изыскания по этому вопросу.
rcopen.com/blogs/99365/17219
Копия и доп инфа у меня.
apmcopter.ru/…/idealnoe-pitanie-dlya-apm.html
Александр СПС за советы при удержании точки по GPS уже не раскаивается зад и вперед как бешеный, правда гуляет по плоскости при ветре (± метр) но это поправимо. Осталось как то победить при Althold про садку при остановке после движения. И не подскажите при движении в Loiter коптер ведет себя как то вяло
правда гуляет по плоскости при ветре (± метр) но это поправимо
Вчера при 9 спутниках коптер тоже плавал около метра. Не каждый день все идеально.
Осталось как то победить при Althold про садку при остановке после движения
Сделано так? apmcopter.ru/…/porolon-dlya-barodatchika.html
И не подскажите при движении в Loiter коптер ведет себя как то вяло
Об этом много писано. Ну режим такой, что ж сделаешь. Вроде не особо у кого получилось ускорить полет.
Александр хочу попробовать еще с этим поиграться как написано
Моментальная потеря высоты 1-2 метра после высокоскоростного горизонтального полета вызвана аэродинамическим эффектом, который приводит к моментальному низкому давлению на верхней части аппарата, когда полетный контроллер полагает, что он подымается. Нет никакого решения для этого поведения, хотя увеличение параметра INAV_TC_Z до 7 (по умолчанию 5) уменьшит эффект который указан в самом начале.
Только я понял нада изменить в Throttle Accel IMAX с 5.0 на 7.0 правильно я понял
А где тако написано? В принципе, это не может быть. У коптера нет аэродинамического качества, чтобы появлялся эффект разности давления от обтекания потоком поверхности с разной кривизной. За счет чего может появится эффект разряжения воздуха над коптером при прямолинейном движении?
Alex я сдесь при смотрел ardupilot-mega.ru/wiki/arducopter/index.html
Alex я сдесь при смотрел ardupilot-mega.ru/wiki/arducopter/index.html
Спасибо за ссылку. Полезный ресурс. Только ошибка барометра из за появления области разряженности над квадром без обтекателя, с точки зрения аэродинамики, полный бред. Должно быть другое объяснение этого эффекта.
Тоже не могу понять, у меня АРМ в корпусе и еще в колпаке, и что интерестно мой первый коптер самодельный открыты также вел себя. Кстати вот мои только не кидайте помидорами я начинающий
s019.radikal.ru/i612/1407/92/95a7c804127e.jpg
s50.radikal.ru/i127/1407/e5/560136d041bd.jpg
s019.radikal.ru/i617/1407/51/6bca6dce19c5.jpg
А может ли перезагружаться APM при переполненной памяти. Обратил внимание что у меня было около 30 логов (коротких, но все же) После удаления тестил пару раз, вроде не перезагружается.
Подскажите плз, может ли арду дергаться из за повышенных вибраций даже в акро режиме? Вроде только все заработало более менее нормально, сменил gps на gps\glonass от omegaprime, и снова понеслось… что в стабе, что в альтхолде, что в лойтере резкие дергания из стороны в сторону периодические. С пидами думаю все в порядке. по ХУ вибрации в пределах нормы а вот по Z бывают какие то то ли резонансы то ли что.
эти скачки по оси z не в моммент посадки случайно отображаются?