А давайте обсудим Arducopter - APM

Cнять винты и отключить проверку GPS. Не забыть включить после тестов.
Снял, проверил. Все было ок. Поставил винты и стало видно, что один винт стартует позже остальных. Также он крутит медленнее остальных из-за чего коптер заваливается не смотря на то, что был режим Stabilise. Есть какая-либо возможность проверить скорость вращения винтов при одинаковом газе?
Может пропустил, за всеми темами не уследишь … было?
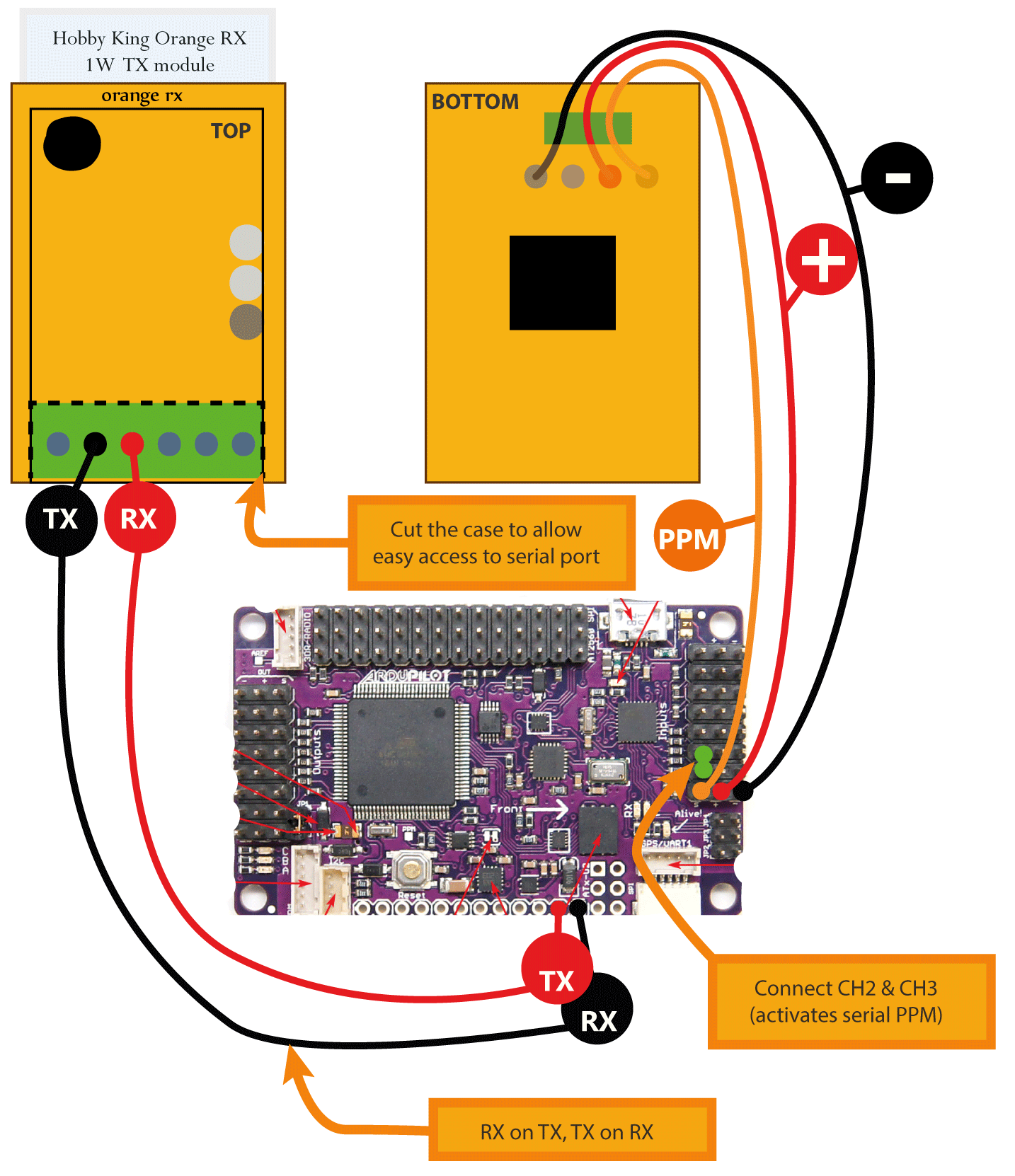
Уупс было … обсуждается OrangeRx Open LRS 433MHz TX Module
Господа, в продолжение к этой проблеме: rcopen.com/forum/f123/topic233564/14658
В кратце, после перехода на новую раму (с квадро на хекс) коптер начен очень нестабильно себя вести, особенно при вращение… Я выкладывал логи, но ничего интересного там не было, но большинство сошлось на том, что скорее всего я как-то не так сбросил настройки после перепрошивки…
Сегодня после сброса настроек и полной перекалибровке всего что можно и нельзя я провел очередной тестовый полет при котором коптер стал себя вести еще хуже, чем до сброса. Сразу после полета я обратил внимание на то, что CW моторы нагреваются значительно сильнее CCW моторов. Решил добавить в лог информацию о выходах на моторы и выяснилось, что на CW моторы подается значительно большая нагрузка, чем на CCW. Вот как выглядят выходы 1 и 2:

На графике видно, что контролер пытался компенсировать вращение, за счет увеличения оборотов на CW моторы, но чем может быть вызвано это вращение?
У меня x6 конфигурация, моторы подключены правильно, пропеллеры отбалансированы, все необходимые юстировки сделаны (включая compassmot).
Вот лог с расширенной информацией:
dl.dropboxusercontent.com/…/2014-11-08 13-47-28.bi…
Может кто сталкивался с подобным?
Спасибо!
Вот выходные значения всех 6 каналов в одном графике:

Здесь отлично видно, как до взлета значения всех 6 каналов были приблизительно одинаковыми, а сразу после отрыва от земли 1, 3 и 6 каналы полуали бОльшую нагрузку, нежели каналы 2, 4 и 5.
1, 3 и 6 каналы полуали бОльшую нагрузку, нежели каналы 2, 4 и 5.
Реальные обороты под нагрузкой измерьте.
Реальные обороты под нагрузкой измерьте.
а как их можно замерять? Я думал, что это как раз без спец оборудования не сделать…
а как их можно замерять?
Тахометр надо. Но судя по всему нету 😦. Может взять у кого-нибудь?
если одни моторы вращаются быстрее других а курс остается стабильным - проблема конструктивная а не программная
например разный шаг у cw и ccw пропеллеров или выкосы моторов
кроме того может быть если сигнал больше а обороты одинаковые может быть неодинаковая калибровка регуляторов,
следует навсякей случай перекалибровать регуляторы
проблема конструктивная
Или один из моторов полуживой. Греются все три одинаково? Можно попробовать местами поменять CW на CCW и сравнить. Если ничего не изменится - проблема скорее всего в регулях.
если одни моторы вращаются быстрее других а курс остается стабильным - проблема конструктивная а не программная
например разный шаг у cw и ccw пропеллеров или выкосы моторовкроме того может быть если сигнал больше а обороты одинаковые может быть неодинаковая калибровка регуляторов,
следует навсякей случай перекалибровать регуляторы
Пропеллеры все одинаковые. Регуляторы калибровал несколько раз (но я их калибровал автоматически все скопом: copter.ardupilot.com/wiki/…/esc-motor/#All_at_once… ). Касательно выкоса моторов - тут сложно что-то сказать - визуально, вроде как, все моторы стоят ровно… Но, было пару аварий - я после них как-то не присматривался (стрелы аллюминевые, может и повело немного) - как точно должны быть выставлены уровни у моторов? Ведь рама сама по себе не может быть очень жесткой и допускает небольшие перегибы даже в полете…
Или один из моторов полуживой. Греются все три одинаково? Можно попробовать местами поменять CW на CCW и сравнить. Если ничего не изменится - проблема скорее всего в регулях.
Попробую сначала изучить раму на предмет деформаций… Далее поменяю мотры CW с CCW. Далее попробую поменять местами esc. По крайней мере в эти три шага можно будет точно выяснить кто виноват, рама, моторы или контролеры.
Спасибо! Потом обязательно отпишусь.
Тахометр надо. Но судя по всему нету 😦. Может взять у кого-нибудь?
Я даже с трудом представляю что за тахометр можно прикрутить к коптеру, чтобы еще с ним и взлететь…
Касательно выкоса моторов - тут сложно что-то сказать - визуально, вроде как, все моторы стоят ровно…
кладете раму на ровный стол, берете столярный угольник, приставляете угольник к мотору
имеется вот такой модуль GPS
Может кто сталкивался с подобным?
Лучи перекошены
Я даже с трудом представляю что за тахометр можно прикрутить к коптеру, чтобы еще с ним и взлететь…
Тахометр ручной оптический типа такого. Аппарат крепите на земле. И на оборотах измеряете.
если одни моторы вращаются быстрее других а курс остается стабильным
А если заваливается? причем в stabilise .
А если заваливается? причем в stabilise
Проверяйте тот движок, на который заваливается. Самая простая проверка - армим, даем немоооожечко газу (чтобы раскрутилось, но не взлетело). Потом убираем газ в ноль. Что смотрим - одинаково ли стартанули и одинаково ли остановились.
Установленные пропеллеры помогают точнее визуально оценить одновременность запуска и одновременность остановки. Регуляторы, конечно же, должны быть откалиброваны “как один” - через полетный контроллер, и “взлет” должен проходить на ровной поверхности…
Если движки одинаково стартуют и одинаково останавливаются, и на подозрительном движке целы обмотки (визуальный осмотр на наличие порывов проводов намотки) - тогда перекошена геометрия - или погнут луч или завернут винтом.
имеется вот такая инструкция
Простите, а Вы прочли все что я написал в сообщении, или только первую строку?
Проблема в том, что настройки слетают, не записываются в память.
Впрочем развитие истории тут.
О может кто знает, почему сбивается дата и время в логах?
у меня или 80 год или 1970 обычно ставит.
12 01.01.1970 3:00:00 est size: 1803776
13 01.01.1970 3:00:00 est size: 18432
14 01.01.1970 3:00:00 est size: 61440
15 01.01.1970 3:00:00 est size: 156160
16 01.01.1970 3:00:00 est size: 56320
Как можно победить?
Как можно победить?
с gps летать…
а Вы прочли все что я написал…
Конечно, только я вопроса не увидел в сообщении, поэтому перенаправил на мануал.
вообще загадка. Выпаял стабилизатор 3.3В, поставил новый - вместо нужных 3.3В получил прежние 4.8В 😵 Убрал совсем стаб с 3.3В, напряжение упало не до 0 а до 4.6В. В таком состоянии плата кроме power при включении уже стабильно подмигивает красным (А), но дальше дело не идет. Примерно с 10 резета стартует, кроме красного мигает синим, и дальше работает как ни в чем не бывало, армится и даже летать можно, правда компас как не работал так и не работает, ну да не особо нужен. Чтобы это значило, откуда паразитное напряжение? Осмотрел всю плату 10 раз ни где ни каких соплей, все целенькое и красивенькое
разобрался. Оказывается китайцы умудрились перенести баг в разводке большой платы APM на сравнительно свежий MiniAPM v3.1 😃 Подробней можно почитать здесь: rcopen.com/blogs/190882/18442 Оказывается они завели 51-ю ногу ATMEGA 2650 на линию 3.3в, поэтому когда на этом выходе логическая единица, вместо 3.3В получаем 4.6В при любых раскладах. Итак, выпаял 51-ю ногу, вернул стаб 3.3в, все заработало - плата стартует, гиро баро компас (правда уже прилепил внешний) работает, даже логи теперь пишутся, не смотря на то что фактически теперь выкусил управление RESET с флешпамяти.
Плата фиолетовая с гудлака goodluckbuy.com/miniapm-v3-1-mini-ardupilot-mega-2… думаю я не последний столкнулся с такой проблемой
перенести баг в разводке большой платы APM
Есть еще один баг: попутаны порты 5 и 3.3 в в преобразователе уровней между процессором и флеш-памятью. Может это тоже объясняет проблемы с питанием 3.3в.