А давайте обсудим Arducopter - APM

Летаю на 4s.так что не то!..
Я про то,что мой колбасит сильнее из-за того,что я летаю на 3s,наверное
Можно настроить на тумблер резкое отключение моторов?
У меня он как-то плавноупал в кусты и свернул луч мотором
Может,и бред,но излом был такой,будто квадр упал на моторы сверху
Но он не падал и не вверх ногами
Калибрую по инструкции, с наклонами вверх-вних все хорошо, а вот право-влево наоборот отображает во флайт дате,
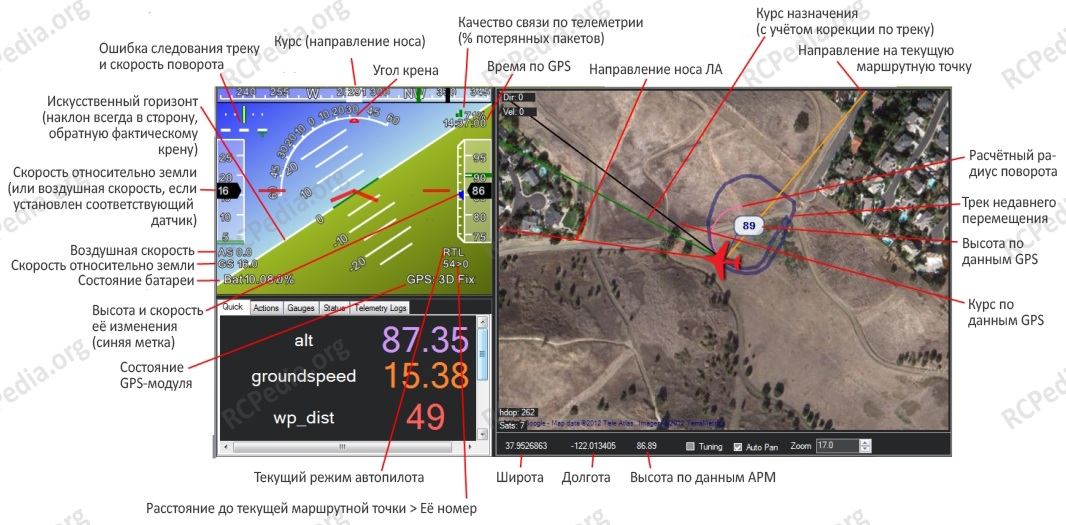
Вы наклоняете квадрокоптер вправо, а земля, соответственно, наклоняется, гтносительно него, в лево. Так и должно быть. Щелкните по HUD-дисплею правой кнопкой, выберите Russian Mode (или как-то так), и посмотрите в этом режиме.
Стрелка компаса, не помню цвет, главное — не черная. Они обе показывают в одну сторону, по идее.
Уточнил. Красная Current Heading — это показание компаса.
Стрелка компаса, не помню цвет, главное — не черная. Они обе показывают в одну сторону, по идее.
Самая важная - красная - фактическое направление,насколько я понял
Да, я сразу дописал об этом 😃
Да, я сразу дописал об этом
Не обновлял страницу))
Коллеги, а кто нибудь взлетал с лодки или катера? По идее перед армингом калибруются гироскопы… а лодка или катер будет слегка качаться…
Уже обсуждалось на высшем уровне. Даже с ледокола заармиться не всегда получается.
Я читал об этом.
По крайней мере, так было раньше. Сейчас я пробовал, с небольшим качением гироскоп калибруется, просто не очень точно. Соответственно, потом немного врет.
Кстати! После калибровки, можно вручную подправить калибровку гироскопа (оффсет) через Mission Planner. 😃 Я тоже пробовал. ) Летать только не пробовал с ручными коррекциями. ))
вот тут обсуждают boat start
diydrones.com/…/how-to-launch-arducopter-iris-or-s…
В первый раз когда тестировал коптер на Arducopter, то аппаратуре наоборот работало вправо-влево. Теперь вот заново откалибровал аксель и теперь вперед-назад перепутаны местами. Я, конечно, могу решить проблему настройков реверса на аппе, но хотелось бы понимать откуда вообще эта фигня берется?
У меня почему-то перестал нормально работать компас - compass incossistent.
При калибровке выбираю внешний компас, склонение автоматически. После калибровки офсеты для внешнего в пределах нормы, но после еще выдает значения и для второго компаса, которые уже около 250. Так и должно быть или его надо как-то отключить принудительно? Верное направление не показывает, в лоитере либо летает “воронкой”, либо вообще деру может дать в сторону. Правда минут через 10 полета начинает держать позицию, но после смены аккумулятора все заново.
Контроллер Pixhawk 3dr
GPS модуль Ublox neo 6
Прошивка 3.2
Ранее на этом коптере все было путем, после перерыва в полетах около месяца такая ситуация. Прошу подсказать где что подправить.
Предлагаю обсудить один вопрос. Но сначала несколько фактов:
- Юлиан, подключая питание, откусил лишь один плюсовой провод. Второй остался на месте, по сути, оставив питание от PowerModule на месте.
- Защитный диод открывается при разности потенциалов 0,3В. Это если я не ошибаюсь.
А теперь, внимание, тема для обсуждения.
- Мы оставляем Power Module полностью подключенным.
- Мы подводим еще одно питание, от понижайки DC-DC (плюс и минус) на контакты A0 или A1.
Я сделал такие замеры: когда подключен лишь PowerModule, через защитный диод, напряжение на APM проседает до 4,6-4,7 вольта.
Подключив второе питание, напрямую, без диода, я получил напряжение на APM 5.00V
Получается, что пока напряжение питания на APM более 4,7 вольт, PowerModule не участвует в питании контроллера, ибо диод закрыт.
Если же напряжение по какой-то причине упадет ниже 4,7V, PowerModule запитает APM в качестве резервного источника питания, добавив недостающую энергию.
Где я ошибаюсь, И где минусы такого, сдвоенного питания?
Спасибо.
Контроллер Pixhawk 3dr GPS модуль Ublox neo 6 Прошивка 3.2
3.2 сильно старовата для пикса,
на 3.3 пробовал на f4by с заведомо кривым компасом, если немного пролететь а потом перейти в лоитер то воронки нет
вроде бы у 3.2 на пиксе вторым становится внутренний встроенный в пикс компас, возможно рядом с ним вкручен намагниченный шуруп, попробуйте выкрутить и размагнитить
3.2 сильно старовата для пикса
Пробовал 3.3 - так же. То есть нельзя использовать только один внешний компас?
В 3.3 есть меню какой компас будет главным в закладке компас (1 или 2).
У Ф4 1 всегда внутренний, 2 внешний. Получается один внешний сделать нельзя.
У пикса может быть по другому (можете уточнить в ветке про пикс). Но судя по идеологии дидронесов и у пикса также.
Предлагаю обсудить один вопрос.
Если же напряжение по какой-то причине упадет ниже 4,7V, PowerModule запитает APM в качестве резервного источника питания, добавив недостающую энергию.
Где я ошибаюсь, И где минусы такого, сдвоенного питания?
Спасибо.
В целом вроде правильно. Но без подвоха скорее не обойдется.
Если предположить, что напряжение просядет до пограничного состояния , то начнутся переключения туда сюда. Выдержит ли 2 регулятор напряжения обратное напряжение (не все на это способны, надо смотреть даташит), там ведь еще и шум будет.
К тому же ПМ стремится сгореть сам по себе. Если он подаст из-за этого все напряжение на АПМ будет не айс. Защиты от перенапряжения ведь нет.
По мне ставить дополнительное питание , которое не потянет , не очень хорошее решение.
По мне грамотно это когда 1 надежный, чем 2 на которые нельзя надеяться.
возможно рядом с ним вкручен намагниченный шуруп, попробуйте выкрутить и размагнитить
Выкрутил из корпуса шуруп - не помогло, офсеты для второго компаса так же завышены ~300 70 250. При неподвижном положении коптера на карте в мишн планере показывает буд-то он вращается произвольно.
Такие офсеты указывают на намагниченность компаса.
Если прошивка 3.3. , то поведение несколько странное. Ф4 используя ЕКФ как бы считает в таком случае , что компасу нет доверия и отключает его. Ф4 после прошивки надо очищать. Наверно пикс тоже надо. Может у Вас накладки прошивки и выключился екф.
Должно быть чисто. Форматировал sd карту, прошивал, после сбрасывал все настройки на заводские. Так же пробовал размагнитить компас вращая коптер во всех направлениях. Вероятно, стоит попробовать с другим внешним модулем.
Я имел ввиду очистку типа еепром.
Коллеги, а кто нибудь взлетал с лодки или катера? По идее перед армингом калибруются гироскопы… а лодка или катер будет слегка качаться…
Я взлетал с парусных яхт неоднократно. причем с довольно небольших (от 36 футов). Проблем нет ни с APM-ом, ни с Назой. Были проблемы с MultiWii ранних версий (типа 2.2.) Также нормально калибруется Alexmos, а вот Storm32 - не хочет. По крайней мере до версии 0.80. (с более новой прошивкой летать еще не приходилось).
Вот пруф. Тут трикоптер с APM и AlexMos 8-bit.
Вероятно, стоит попробовать с другим внешним модулем.
Для начала стоит попробовать следующий алгоритм:
- Снять пикс с коптера и подключить через юсб
- Перепрошить
- Стартануть предварительно зажав сафетисвич и удерживая ~ секунд 10
- Сбросить настройки на дефолт
- Извлечь сд карту и очистить
- Запустить пикс без сд карты и терминалом из мишн планера подрубиться и выполнить mtd start и далее mtd erase
- Запуститься нормально(контроллер по прежнему вне коптера на столе) и попробовать откалибровать компас и аксели и проверить
далее по результату(может намагничен, может намагничено что то рядом на коптере, может проблемы на плате\флюс\грязь\сопля)
ПС На пиксе по дефолту если стоит внешний компас то оный первый а тот что в пиксе становиться вторым, если внешнего нет то первый - встроенный…из меню где калибруете можно отключить любой из них и\или выбрать какой основной…
Я думал что сборос на заводские настройки в полном дереве и есть чистка еепром, так как терминала у меня нет. Нужно ставить старую версию мишн планера?