А давайте обсудим Arducopter - APM

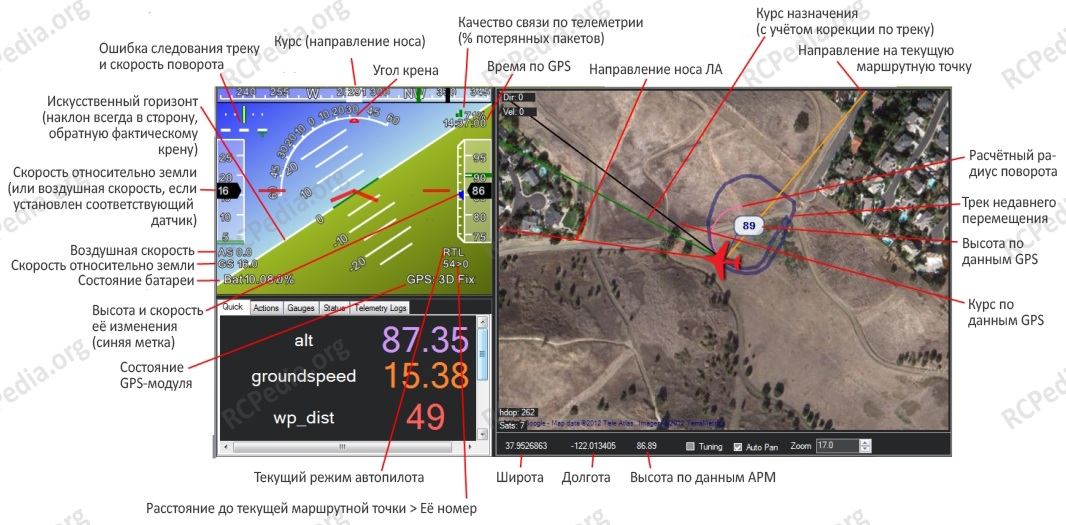
Стрелка компаса, не помню цвет, главное — не черная. Они обе показывают в одну сторону, по идее.
Самая важная - красная - фактическое направление,насколько я понял
Да, я сразу дописал об этом 😃
Да, я сразу дописал об этом
Не обновлял страницу))
Коллеги, а кто нибудь взлетал с лодки или катера? По идее перед армингом калибруются гироскопы… а лодка или катер будет слегка качаться…
Уже обсуждалось на высшем уровне. Даже с ледокола заармиться не всегда получается.
Я читал об этом.
По крайней мере, так было раньше. Сейчас я пробовал, с небольшим качением гироскоп калибруется, просто не очень точно. Соответственно, потом немного врет.
Кстати! После калибровки, можно вручную подправить калибровку гироскопа (оффсет) через Mission Planner. 😃 Я тоже пробовал. ) Летать только не пробовал с ручными коррекциями. ))
вот тут обсуждают boat start
diydrones.com/…/how-to-launch-arducopter-iris-or-s…
В первый раз когда тестировал коптер на Arducopter, то аппаратуре наоборот работало вправо-влево. Теперь вот заново откалибровал аксель и теперь вперед-назад перепутаны местами. Я, конечно, могу решить проблему настройков реверса на аппе, но хотелось бы понимать откуда вообще эта фигня берется?
У меня почему-то перестал нормально работать компас - compass incossistent.
При калибровке выбираю внешний компас, склонение автоматически. После калибровки офсеты для внешнего в пределах нормы, но после еще выдает значения и для второго компаса, которые уже около 250. Так и должно быть или его надо как-то отключить принудительно? Верное направление не показывает, в лоитере либо летает “воронкой”, либо вообще деру может дать в сторону. Правда минут через 10 полета начинает держать позицию, но после смены аккумулятора все заново.
Контроллер Pixhawk 3dr
GPS модуль Ublox neo 6
Прошивка 3.2
Ранее на этом коптере все было путем, после перерыва в полетах около месяца такая ситуация. Прошу подсказать где что подправить.
Предлагаю обсудить один вопрос. Но сначала несколько фактов:
- Юлиан, подключая питание, откусил лишь один плюсовой провод. Второй остался на месте, по сути, оставив питание от PowerModule на месте.
- Защитный диод открывается при разности потенциалов 0,3В. Это если я не ошибаюсь.
А теперь, внимание, тема для обсуждения.
- Мы оставляем Power Module полностью подключенным.
- Мы подводим еще одно питание, от понижайки DC-DC (плюс и минус) на контакты A0 или A1.
Я сделал такие замеры: когда подключен лишь PowerModule, через защитный диод, напряжение на APM проседает до 4,6-4,7 вольта.
Подключив второе питание, напрямую, без диода, я получил напряжение на APM 5.00V
Получается, что пока напряжение питания на APM более 4,7 вольт, PowerModule не участвует в питании контроллера, ибо диод закрыт.
Если же напряжение по какой-то причине упадет ниже 4,7V, PowerModule запитает APM в качестве резервного источника питания, добавив недостающую энергию.
Где я ошибаюсь, И где минусы такого, сдвоенного питания?
Спасибо.
Контроллер Pixhawk 3dr GPS модуль Ublox neo 6 Прошивка 3.2
3.2 сильно старовата для пикса,
на 3.3 пробовал на f4by с заведомо кривым компасом, если немного пролететь а потом перейти в лоитер то воронки нет
вроде бы у 3.2 на пиксе вторым становится внутренний встроенный в пикс компас, возможно рядом с ним вкручен намагниченный шуруп, попробуйте выкрутить и размагнитить
3.2 сильно старовата для пикса
Пробовал 3.3 - так же. То есть нельзя использовать только один внешний компас?
В 3.3 есть меню какой компас будет главным в закладке компас (1 или 2).
У Ф4 1 всегда внутренний, 2 внешний. Получается один внешний сделать нельзя.
У пикса может быть по другому (можете уточнить в ветке про пикс). Но судя по идеологии дидронесов и у пикса также.
Предлагаю обсудить один вопрос.
Если же напряжение по какой-то причине упадет ниже 4,7V, PowerModule запитает APM в качестве резервного источника питания, добавив недостающую энергию.
Где я ошибаюсь, И где минусы такого, сдвоенного питания?
Спасибо.
В целом вроде правильно. Но без подвоха скорее не обойдется.
Если предположить, что напряжение просядет до пограничного состояния , то начнутся переключения туда сюда. Выдержит ли 2 регулятор напряжения обратное напряжение (не все на это способны, надо смотреть даташит), там ведь еще и шум будет.
К тому же ПМ стремится сгореть сам по себе. Если он подаст из-за этого все напряжение на АПМ будет не айс. Защиты от перенапряжения ведь нет.
По мне ставить дополнительное питание , которое не потянет , не очень хорошее решение.
По мне грамотно это когда 1 надежный, чем 2 на которые нельзя надеяться.
возможно рядом с ним вкручен намагниченный шуруп, попробуйте выкрутить и размагнитить
Выкрутил из корпуса шуруп - не помогло, офсеты для второго компаса так же завышены ~300 70 250. При неподвижном положении коптера на карте в мишн планере показывает буд-то он вращается произвольно.
Такие офсеты указывают на намагниченность компаса.
Если прошивка 3.3. , то поведение несколько странное. Ф4 используя ЕКФ как бы считает в таком случае , что компасу нет доверия и отключает его. Ф4 после прошивки надо очищать. Наверно пикс тоже надо. Может у Вас накладки прошивки и выключился екф.
Должно быть чисто. Форматировал sd карту, прошивал, после сбрасывал все настройки на заводские. Так же пробовал размагнитить компас вращая коптер во всех направлениях. Вероятно, стоит попробовать с другим внешним модулем.
Я имел ввиду очистку типа еепром.
Коллеги, а кто нибудь взлетал с лодки или катера? По идее перед армингом калибруются гироскопы… а лодка или катер будет слегка качаться…
Я взлетал с парусных яхт неоднократно. причем с довольно небольших (от 36 футов). Проблем нет ни с APM-ом, ни с Назой. Были проблемы с MultiWii ранних версий (типа 2.2.) Также нормально калибруется Alexmos, а вот Storm32 - не хочет. По крайней мере до версии 0.80. (с более новой прошивкой летать еще не приходилось).
Вот пруф. Тут трикоптер с APM и AlexMos 8-bit.
Вероятно, стоит попробовать с другим внешним модулем.
Для начала стоит попробовать следующий алгоритм:
- Снять пикс с коптера и подключить через юсб
- Перепрошить
- Стартануть предварительно зажав сафетисвич и удерживая ~ секунд 10
- Сбросить настройки на дефолт
- Извлечь сд карту и очистить
- Запустить пикс без сд карты и терминалом из мишн планера подрубиться и выполнить mtd start и далее mtd erase
- Запуститься нормально(контроллер по прежнему вне коптера на столе) и попробовать откалибровать компас и аксели и проверить
далее по результату(может намагничен, может намагничено что то рядом на коптере, может проблемы на плате\флюс\грязь\сопля)
ПС На пиксе по дефолту если стоит внешний компас то оный первый а тот что в пиксе становиться вторым, если внешнего нет то первый - встроенный…из меню где калибруете можно отключить любой из них и\или выбрать какой основной…
Я думал что сборос на заводские настройки в полном дереве и есть чистка еепром, так как терминала у меня нет. Нужно ставить старую версию мишн планера?
так как терминала у меня нет. Нужно ставить старую версию мишн планера?
Как раз наоборот, надо поставить последнюю версию МП.
Терминал там есть.
Нужно ставить старую версию мишн планера?
нужно включить расширенный режим мишен планера в его настройках.
можно вынуть флешку и после перезагрузки подключиться любой терминальной программой,
под винду мне нравится termite