А давайте обсудим Arducopter - APM

Не фонтан. Летать будет как-то, но скорее всего будут проблемы.
Это большие вибрации? тогда что значит маленькие? Всегда считалось допустимые вибрации ±3, а тут ±1.5
Мне бы таких достичь…у меня допустим ±5, и проблем никогда не было.
Был бы надежный, не вставал бы вопрос про резервный.
Модуль от козина достаточно надежный источник питания с вашей точки зрения например? у меня основным стоит он, от назы еще стоит на другом аппарате…
А на счет вкуса, по мне лучше 2 хороших чем 1 хороший, не?
Я летаю много, нарно под час в день если разделить общее время например за последний год, летаю в тропических условиях при высокой влажности и темп. и т.д. и горело у меня уже все что можно, и резервное питание реально спасало аппарат…елиб его небыло были бы дрова, утопцы и т.д…
подобный уровень вибраций считается недопустимым.

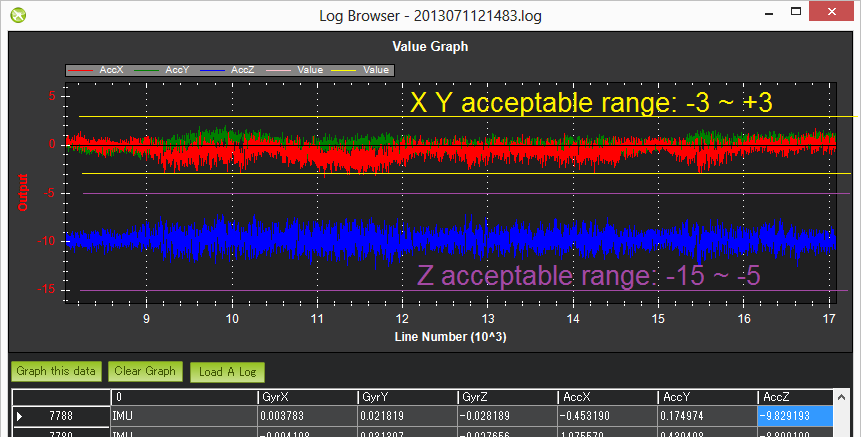
Уровень вибраций после балансировки пропеллеров и замены демпферов на более мягкие. уровень по осям XY в норме, ось Z - высота недопустимо сильно вибрирует.

Вибрации после совмещения центра упругости с центром масс и утяжеления полетного контроллера 100г грузом

просто наглядный пример уровней вибраций при фильтре 43гц.
если фильтр стоит 20 то показания на вибрирующей раме будут сильно занижены и для достоверной оценки нужно поменять фильтр и совершить тестовый полет для записи логов
подобный уровень вибраций считается недопустимым.
Вай как я отстал от жизни… два года назад когда я строил коптер такая картинка была бы эталонной… я как-то на ней остановился и забыл…
ради интереса на выходных включил логгирование вибраций… посмотрел что они ±5 и ±10 и успокоился… а оказывается все плохо…(правда я готовлюсь к приходу 200 рамы и тренируюсь на 500ке))) там ща нагрузка на нее будь здоров.)
Кстати… я дико отстал от темы, видел тут всякие фильтры …ЕКФ или еще что-то… это как-то влияет на график? Я то по старинке все настраивал…(точнее как год назад последний раз обновился больше в настройки не лазил…так и летаю)
полюбому сильные вибрации вредны, даже если математика современного 32 битного контроллера и как то переварит их, то механически сильные вибрации в любом случае негативны. С вибрациями может происходить механическая модуляция фазы у кварцевых резонаторов, возникать паразитная генерация в керамических конденсаторах, практичиески это выливается в помехи в работе навигационных приемников, видео и радио аппаратуры.
ну и конечно же конструктивные разрушения и ускоренный износ
полюбому сильные вибрации вредны,
с этим спорить глупо, но что считать сильными вибрациями?
Я то опирался на урдупилотовские мануалы… и там говорилось ± 3 это ок…
у них свои взгляды на норму, у меня свои.
при их норме лететь то будет, но не так хорошо как обычно хочет пользователь
- чтобы полет был стабильным и предсказуемый
- чтобы высоту держало с точностью до нескольких см
у них свои взгляды на норму, у меня свои.
при их норме лететь то будет, но не так хорошо как обычно хочет пользователь
Эх, Алексей, а я то думал я из 500 выжал все что мог… и стало скучно… и решил уйти в малый класс… а оказывается есть еще че поковырять и по паять))))
Ну теперь ради принципа попробую)) А что на счет фильтров всяких… ЕКФ это вообще что? И с чем его едят…
ЕКФ это вообще что? И с чем его едят…
это достаточно затратный с точки зрения вычислительных мощностей алгоритм обработки комплекса датчиков.
реализован для 32 битных контроллеров,
для ардукоптера нормальные версии появились начиная с версии 3.3
к примеру в 3.3.2 на плате f4by мы сделали множество тестов и обнаружили что решена проблема “унитаза” при помехах на компас,
контроллер в ходе краткого полета по прямой учится по жпс где стороны света и если компас врет то екф временно не принимает его показания
реализован для 32 битных контроллеров,
APMка же вроде 8ми битная если я не ошибаюсь?
Наткнулся тут на интересную виброразвязку,
4 In 1 3S~6S PDB Current Voltage Sensor 5V 12V BEC Anti-vibration Board for APM PIX Multicopter (у меня есть такая же обычная без электроники, я ее не исползьзовал никогда, место жрет)
А в таком формате интересное решение, интересно, наводки будет давать на контроллер?


лично мне не нравится близость платы распределения питания к автопилоту,
обычно плату распределения питания ставят наоборот подальше от полетника, куда нибудь ниже рамы
Комрады а какая сейчас супер стейбл прошивка для арупилота на атмеге?
А в таком формате интересное решение, интересно, наводки будет давать на контроллер?
Я такую получил неделю назад и проиграл спор… хотел деньги вернуть.
- Отсутствует напряжение 5.0В. Контакты на плате соединены параллельно с выходом на питание APM 5.3В
- Напряжение на APM не 5.3В а 5.25В
- На выходе 12В при 4S получил 11.5В, при 3S 11.2В. Что странно, т.к. стабилизатор похож на импульсный.
- Датчик тока и напряжения нормальный и показания тока не плавают.
Комрады а какая сейчас супер стейбл прошивка для арупилота на атмеге?
для начала 3.1
крайняя до того как стали отягощать код подготовкой к миграции на пикс, еще поддерживает терминал и вмещает все функции втч сервоподвес 3.1.5
при наличии навыков и приемов настройки, калибровки , умения выбрать расположение компонентов можно и 3.2 (3.2.1) но при испольхоании нмеа жпс следует использовать немножко модифицированный вариант
APMка же вроде 8ми битная если я не ошибаюсь?
Правильно.
Алексей писал о дальнейшем развитии проекта основанном уже на 32 бит.
для начала 3.1
крайняя до того как стали отягощать код подготовкой к миграции на пикс, еще поддерживает терминал и вмещает все функции втч сервоподвес 3.1.5
при наличии навыков и приемов настройки, калибровки , умения выбрать расположение компонентов можно и 3.2 (3.2.1) но при испольхоании нмеа жпс следует использовать немножко модифицированный вариант
Я сейчас на V3.2.1 но она у меня стоит со времен царя гороха, за темой не следил думал может что свежее появилось, значит сижу не рыпаюсь, а на Пиксе она же апгрейдить или тоже можно спокойно сидеть?
Пользуясь случаем спрошу, тут стал замечать, что появилось раздражающее рысканье не помню чтоб раньше такое было в лоиторе раньше, глянул график а там переруливание хотя стоковые пиды. dl.dropboxusercontent.com/u/3950710/…/yawpid.jpg
Я сейчас на V3.2.1 но она у меня стоит со времен царя гороха, за темой не следил думал может что свежее появилось
Нет, это было последнее.
а на Пиксе она же апгрейдить
На пиксе последняя 3.4. Но это лучше следить в теме про пикс.
Модуль от Козина достаточно надежный источник питания с вашей точки зрения например?
Для н.у.
А на счет вкуса, по мне лучше 2 хороших чем 1 хороший, не?
Как говориться - лучшее враг хорошего. 1 хороший - это тот, что не подводит в требуемых условиях эксплуатации.
Я летаю много, нарно под час в день если разделить общее время например за последний год, летаю в тропических условиях при высокой влажности и темп. и т.д. и горело у меня уже все что можно, и резервное питание реально спасало аппарат…елиб его небыло были бы дрова, утопцы и т.д…
Это уже нестандартные (специальные) условия эксплуатации. Соответственно требуется нестандартное оборудование. Я себе кстати для нестандартных условий как раз разрабатываю новое, чтоб могло выдержать и такие условия тоже.
Вы еще не думали разделить нагрузку на 2 стаба (все равно 2 катается), чтоб облегчить условия эксплуатации и не менять постоянно сгоревшие.
Кстати, а как в таких условиях у Вас выживают ЕСК? У них должна быть тепловая нагрузка еще больше.
Я такую получил неделю назад и проиграл спор… хотел деньги вернуть.
- Отсутствует напряжение 5.0В
А глазами это не видно было на фотке?)
1 хороший - это тот, что не подводит в требуемых условиях эксплуатации.
В большой авиации например дублируется/резервируется все что можно, тоесть там плохие железки чтоль используют которые “подводят в требуемых условиях”, дураки? я собственно не понимаю почему не зарезервировать если по весу и т.д это ничего не стоит и железка это позволяет…?
Кстати, а как в таких условиях у Вас выживают ЕСК? У них должна быть тепловая нагрузка еще больше.
Запас более чем в 2 раза плюс радиаторы
Собственно дело даже не столько в условиях сколько в налете…верю, если по выходным пару батарей повисеть то резервировать ничего не надо и регули можно впритык ставить и моторы могут работать в режиме нагрева значительного и т.д…а если летаешь много/в сложных условиях то возможность резервирования это несомненный плюс, который может спасти аппарат, камеру, подвес и т.д.
Собственно при таком налете падал я последний и единственный раз года за 3-4 нарно когда экспериментировал с блинами u8 и автоквадовскими регулями, из за срыва синхронизации…все остальные разы когда что то горело(даже аккум в полете) я штатно садился без всяких повреждений, что говорит о том что я все делаю правильно в плане сборки…
В большой авиации например дублируется/резервируется все что можно, тоесть там плохие железки чтоль используют которые “подводят в требуемых условиях”, дураки?
Все определяется технической необходимостью.
я собственно не понимаю почему не зарезервировать если по весу и т.д это ничего не стоит и железка это позволяет…?
Да, конечно можно, если Вам не жалко несколько грамм веса. И я не сомневаюсь, что лично Вы собрали все правильно, учтя все мелочи и опасности резервного питания для тяжелых условий эксплуатации. Я сомневаюсь, что это всем надо, и стоит ли это рекомендовать всем.
Запас более чем в 2 раза плюс радиаторы
Ведь тоже самое можно сделать и с регулятором напряжения и также не будет подводить даже в самых тяжелых условиях.
Ведь тоже самое можно сделать и с регулятором напряжения и также не будет подводить даже в самых тяжелых условиях.
А с чего вы решили что подводить не будет, будет, весь вопрос в вероятности…хорошо охлаждая и беря с запасом снижаем эту вероятность, беря схему способную летать без одного или двух моторов + беря большой запас чтоб в случае выхода из строя мотора соседние даже работая с повышенной нагрүзкой не выходили на режим когда оная нагрузка увеличивает нагрев и т.д. еще увеличиваем надежность системы…
Аналогично и по питанию контроллера/того что от него напитано как то приемники например…пикс позволяет зарезервировать питание самого контроллера и того что от него питается, это несомненный плюс данной железки, и имея данную возможность пользователь может выбрать опираясь на свой опыт/опыт других нүжно ему или нет, мой например говорит что нужно резервировать, ваш - нет, вы соответственно можете не резервировать…
Все определяется технической необходимостью.
Техническая необходимость резервирования электроники идентична, смысл оной что в случае выхода из строя системы которая зарезервирована ты продолжаешь полет/идешь на посадку а не теряешь управление/падаешь и собираешь обломки…в случае большой авиации обломки вместе с паксами, что оную необходимость и диктует…на заре авиации было не так(а так как примерно сейчас с коптерами что мы тут обсуждаем), но эволюционным путем пришли к тому что сейчас…