А давайте обсудим Arducopter - APM

Отлично будет летаться. Удивитесь. Большая часть дешевых контроллеров летают без комаса.
Только можно будет забыть про удержание точки и авто-возврат… Тогда можно сразу и GPS выбросить… Какой-тогда вообще смысл? Это основные фишки этого контроллера.
Вопросы новичка.
- Стоит ли на APM 2.8 использовать S.Bus? В случае его использования как-то страдает производительность ПК и смогу ли я по одному сигнальному проводу передавать значения 8 каналов аппаратуры Radiolink AT9?
- Где взять последнюю актуальную прошивку s.bus для APM?
- Обязательно ли настраивать FailSafe при потере сигнала программно в APM, если аппаратура Radiolink AT9 поддерживает “аппаратный” F/S?
Спасибо за ответы.
. Большая часть дешевых контроллеров летают без комаса.
а нафига тогда он нужен?для авто режимов?
Мужики, может кто подсказать, у нас есть два самодельных квадрика, один мой, достаточно большой (грузоподьемность 2.5кг) второй друга небольшой (тягает около 500г). у меня стоит АПМ2.8 у друга 2.6, радиоуправления у нас разные, (и бывает ставим разные типы, либо самодельное либо заводское) раньше я летал, впринципе проблем не возникало, потом как то мой квадрик на высоте 1км начал терять управление, и файлсейв его спустил к точке взлета, после этого я не летал месяца 2, потом вроде бы подключал к компу, обновил прошивку, и внимание, примерно на одном из 3 полетов в любом режиме где задействовано удержание по GPS он начинает улетать, и когда переключаешь в режим без жпс, все становится нормально. со вторым квадриком то же самое, друг как то решил не удерживать его и посмотрел куда он полетит, оказалось он немного пролетел и начал летать по кругу вокруг точки взлета… мне это напомнило файлсейв, но радиотелеметрия не показывала что сработал файлсейв. вот сейчас думаю откатить прошивку назад. но квадрик пока на модернизации, делаю гальваническую развязку по питаниям и сигналам. кто нибудь может это обьяснить?
вы достаточно нечетко описали проблему,
возможно то что вы называете полетом по кругу - так называемая toilet bowling или туалетная воронка
обычно она возникает при неточной калибровке компаса, попробуйте перекалибровать и проверить правильность указания на стороны света
- Стоит ли на APM 2.8 использовать S.Bus? В случае его использования как-то страдает производительность ПК и смогу ли я по одному сигнальному проводу передавать значения 8 каналов аппаратуры Radiolink AT9?
Да. Нет. Да 😃
- Где взять последнюю актуальную прошивку s.bus для APM?
Вы путаете. Прошивать под S-Bus надо не сам APM, а только PPM кодер. Под него существует единственная прошивка, которая поддерживает S.Bus.
Тут в комментах есть.
apmcopter.ru/apm/…/proshivaem-ppm-encoder.html
Обязательно ли настраивать FailSafe при потере сигнала программно в APM, если аппаратура Radiolink AT9 поддерживает “аппаратный” F/S
Это разные вещи. Аппаратный FS в AT9 определяет - как себя ведёт приёмник при потере связи. А вот как на это отреагирует контроллер - определяется в самом APM.
Я калибровал… Но калибровал не в статике, а под нагрузкой (прижимал коптер штативом к земле, давал газа и калибровал, параллельно замеряя напряжение и ток внешним прибором). В итоге в статике напряжение немного завышает, но зато в полете все параметры более-менее точно показывает (правда напряжение почему-то по прежнему прыгает на OSD, но в среднем ясно). Впрочем напряжение мне не так важно, а вот по израсходованным mah уже можно более-менее судить, на сколько еще хватит акка. Вчера летал, расход почти совпал с тем, что потом залилось в акки на заряднике 😒 Раньше врал больше, а сейчас, как перешел на 4S, стало гораздо точнее. При этом я даже не делал калибровку модуля заново…
Полностью аналагичное совподение когда я еще в 14 году так же делал. ПОд нагрузкой выставлял напругу, а вот ток врет и до сих пор я забил. Главное, что под напругой напряжение правильно показывает.
Главное, что под напругой напряжение правильно показывает.
Масло маслянное. Напряжение снимаестя напрямую на АЦП, без всяких сенсоров, поэтому никакой разницы нет, под нагрузкой или без нее.
Для большей точности правильной подстройки коэффициента, лучше измерять на нижнем пороге батареи (3.5-3.6в на банке)
Масло маслянное. Напряжение снимаестя напрямую на АЦП, без всяких сенсоров, поэтому никакой разницы нет, под нагрузкой или без нее.
Для большей точности правильной подстройки коэффициента, лучше измерять на нижнем пороге батареи (3.5-3.6в на банке)
Это я настраивал ОСД от Apm когда еще в 2014 году не было под Назу Лайт осд, так что тогда были такие проблемы и нюансы. Тогда под назу не было вообще осдшки приходилось перепаивать и прошивать под назу лайт.
со вторым квадриком то же самое, друг как то решил не удерживать его и посмотрел куда он полетит, оказалось он немного пролетел и начал летать по кругу вокруг точки взлета…
явные неполадки с ЖПС, оставте коптер включеным на часа 2 на окне или под открытым небом, перекалибруйте компас
… кто нибудь может это обьяснить?
Ну а в логах, что ?
А кто нибудь юзал Mini Apm Pro 2.6? Интересно есть ли в нем проблема с питанием, ка у обычного apm?
А кто нибудь юзал Mini Apm Pro 2.6? Интересно есть ли в нем проблема с питанием, ка у обычного apm?
Такая плата? rctimer.com/product-1170.html (не реклама).
Летал немного на нём, из косяков нашёл только пульсации питания от 4.7 до 4.9 очень частые (десятки герц примерно). питание от PowerModule китайского клона 3DR, только заменил датчик тока с шунтирующего резистора на acs758-050b. Так вот модуль выдаёт стабильно 5.2 (смотрел осциллографом), а на плате творится кошмар. И, думается мне, что из-за этих скачков АМП неправильно интерпретирует показания датчика тока (они сильно плавают). Надо питание будет подводить мимо power разъёма.
Такая плата? rctimer.com/product-1170.html (не реклама).
Летал немного на нём, из косяков нашёл только пульсации питания от 4.7 до 4.9 очень частые (десятки герц примерно). питание от PowerModule китайского клона 3DR, только заменил датчик тока с шунтирующего резистора на acs758-050b. Так вот модуль выдаёт стабильно 5.2 (смотрел осциллографом), а на плате творится кошмар. И, думается мне, что из-за этих скачков АМП неправильно интерпретирует показания датчика тока (они сильно плавают). Надо питание будет подводить мимо power разъёма.
Нет вот такая модель. Именно про версия. Китаец который летал на Мини Талоне мне ответил мол там показания тока правильные типа он лучше чем простая версия.
К Обсуждению APM Power-Module
На своем питании по Фэншую поднял до 4,99 V с нагрузкой, без нагрузки 5,1 V. Разница по любому как не крути.
Внешний (не шибко точный) амперметр показал 0,3 А под нагрузкой всей системы в режиме DISARM. (это на всякий случай)
Проверил все pin на шине, все сходится, ни чего не перепутано.
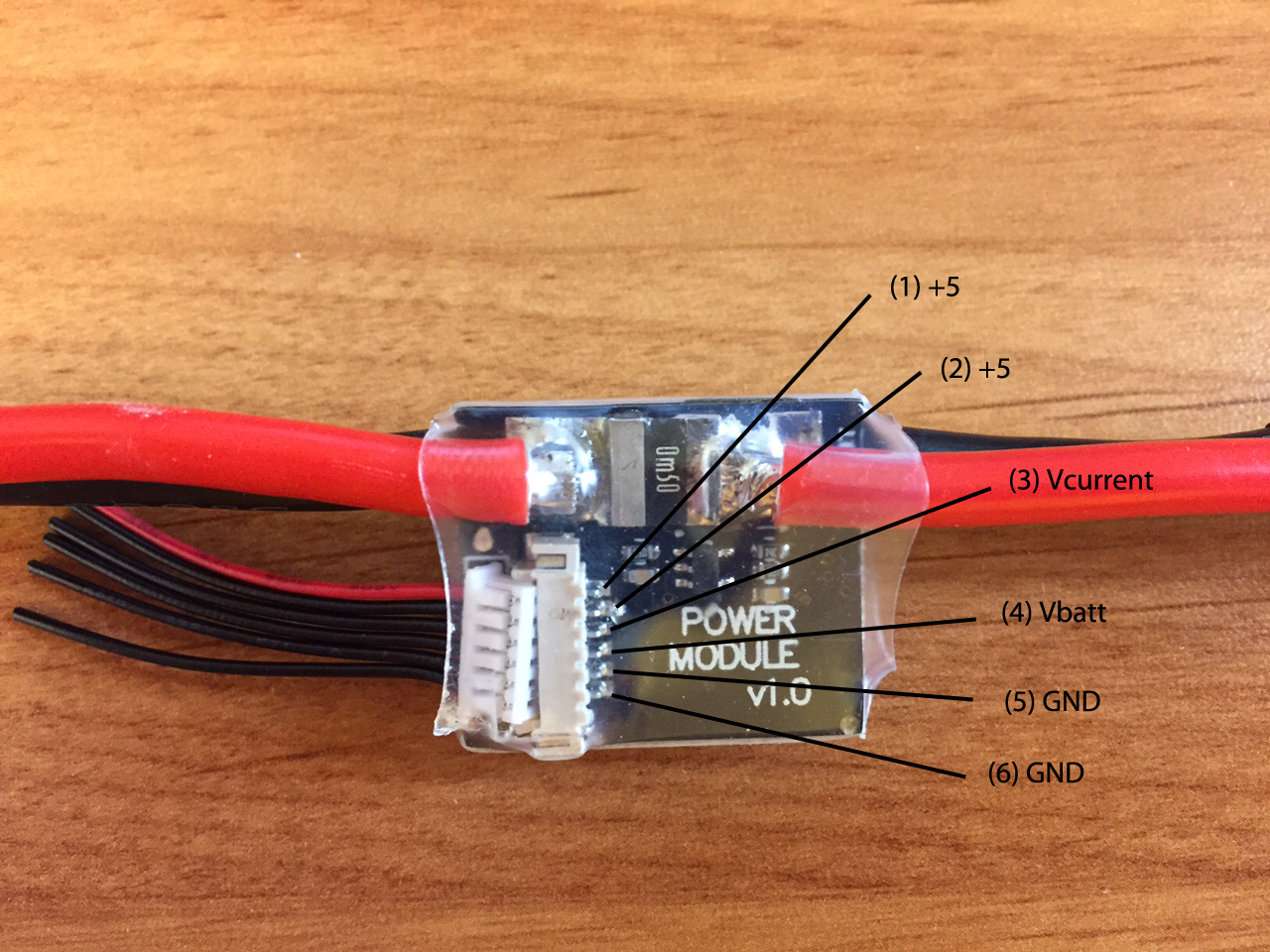
(1) +5,32 V
(2) +5,32 V
(3) датчик тока
(4) + 8,62 V (какое значение допустимо и при каких условиях?)
(5) GND
(6) GND
Последний раз настраивал модуль при просаженной 4S батарее до 15 V. Зарядил батарею, по факту 16,75 V - модуль говорит что 16,2 V и значение плавает + - 0,1 V. В реальном времени начинаю давать нагрузку моторами, значение в планере начинает отставать от факта на 1 V, дальше больше… И так уже по десятому кругу.
К Обсуждению APM Power-Module
На своем питании по Фэншую поднял до 4,99 V с нагрузкой, без нагрузки 5,1 V. Разница по любому как не крути.
Внешний (не шибко точный) амперметр показал 0,3 А под нагрузкой всей системы в режиме DISARM. (это на всякий случай)Проверил все pin на шине, все сходится, ни чего не перепутано.
(1) +5,32 V
(2) +5,32 V
(3) датчик тока
(4) + 8,62 V (какое значение допустимо и при каких условиях?)
(5) GND
(6) GNDПоследний раз настраивал модуль при просаженной 4S батарее до 15 V. Зарядил батарею, по факту 16,75 V - модуль говорит что 16,2 V и значение плавает + - 0,1 V. В реальном времени начинаю давать нагрузку моторами, значение в планере начинает отставать от факта на 1 V, дальше больше… И так уже по десятому кругу.
Не знаю но мне Китаец ответил который на дальняк летает на Талоне 72км, что мини апм про лучше чем обычная версия из-за более точного показания Power модуля.
- 8,62 V (какое значение допустимо и при каких условиях?)
Скорее всего это power module не для APM. Так как для APM на Power Module уже должен быть встроенный делитель напряжения и выходное напряжение на Vbatt никогда не должно превышать 5В. Если есть тестер, то прозвоните Vbatt и +провод питания. Если звонится напрямую, то AVR на плате APM мог уже и погореть.
прозвоните Vbatt и +провод питания. Если звонится напрямую, то AVR на плате APM мог уже и погореть.
Андрей, спасибо за помощь, и за проблеск света в конце туннеля.
Какой провод питания звонить?
Тот что на модуле 5,32V? Он к АРМ не подключен…
Тот что приходит на АРМ от Фэншуя для питания мозга?
Тот что на модуле 5,32V? Он к АРМ не подключен…
вот относительно его и звонить, тот который по картинке выше №4 Vbatt, но нет там у вас короткого, там будет несколько кОм, просто делитель так в модуле настроен
Возможно китайцы специально завышают выходное напряжения делителя (при условии что в АПМе стоит ещё делитель) пытаясь тем самым поднять точность… вопрос есть ли делитель в АПМ?
Какой провод питания звонить?
Красный провод от батареи. Есть подозрение, что у вас на модуле Vbatt - это просто “+” батареи. Хочется проверить это предположение.
Если оно неверно, то надо искать на плате модуля делитель и смотреть номиналы элементов в нём. Возможно просто китайцы накосячили с номиналами.
Какой провод питания звонить?
Тот что на модуле 5,32V? Он к АРМ не подключен…
Тот что приходит на АРМ от Фэншуя для питания мозга?
Между +батареи и пин-4, должно быть сопротивление. И скорее всего оно будет, но так как вероятно резистор подгорел, сопротивление будет не верное.
Мне кажется, самый простой выход, установить дополнительный делитель из двух резисторов, расчитать можно по любому voltage divider calculator.
Из расчета при полностью заряженной батареи, на АЦП не должно выходить более 5в.