А давайте обсудим Arducopter - APM

сделал AutoTune, PIDы настроились, P поднялись, если сравнивать с значениями по умолчанию раза в два.
Тоже, когда делал AutoTune на моторах (5010) с низкими оборотами, результатом был не доволен, такая же картина, P-пришлось вернуть на дефолтные. в итоге вернул все настройки обратно. При спуске на таких моторах и больших пропах, всегда колбасит, большая инерция (магнитов много и не маленькие), но это не большая плата за эффективность.
когда делал AutoTune
на 1047 не помог
на 1045 более менее
кстати, кто как настраивает пиды?
в акро или так?
хз все чудно работает автотюн. Вот видео после автотюна
www.youtube.com/watch?v=mO3PnNo0Hf4
тюнил сначала ролл+питч и отдельно яв
вмг 980кв 10х4.5 3S
Здравствуйте коллеги.
На днях летал-с. контроллер APM 2.6. Возникла проблема:
2 раза тело пыталось врубить LAND.
Первый раз: сработал FS по обрыву радио, включился RTL, потом LAND.
Вовремя успел переключить в Stab и вернуться домой, благо высота была около 50 м.
Второй раз сел в снег, высоты не хватило. 😦
После просмотра графиков было выяснено, что все произошло в связи с EKF_CHECK.
В МП в параметрах я установил EKF_CHECK = 0, думал отключил, ан не тут-то было! Оказывается он на APM работает!!!???
В связи с этим вопрос: как его выключить, что бы мозги не делал?
После прочтения информации про EKF включил логирование вибрации и подлетнул дома на минутку, файл приложен.
Погонял тело вверх-вниз, влево вправо, на сколько позволяла комната.
Просьба: Посмотрите пожалуйста логи, оцените вибрации, лог приложен.
Заранее спасибо.
После просмотра графиков было выяснено, что все произошло в связи с EKF_CHECK.
В МП в параметрах я установил EKF_CHECK = 0, думал отключил, ан не тут-то было! Оказывается он на APM работает!!!???
В связи с этим вопрос: как его выключить, что бы мозги не делал?Заранее спасибо.
Ну сам фильтр Калмана в АПМ не работает, но наскольно я понял, переменная EKF ипользуется, для различных аварийных ситуаций, в основном из-за ошибок по компасу и ГПС.
В параметрах фигурирует только параметр EKF_CHECK_THRESH 0.8-1.0 (порог срабатывания FailSafe по EKF)
есть еще параметр действия, но насколько помню в параметрах АПМ он не доступен.
FS_EKF_ACTION: EKF Failsafe Action
1 Land
2 AltHold
3 Land even in Stabilize
Всем добрый вечер!
Пытаюсь разобраться с АПМ, но как то туго мне поддается…
проблема собственно в чем, кратко опишу последовательность своих действий:
Перестал коннектиться АПМ к компьютеру после подключения GPS, ну и соответственно не работающий GPS (не видел спутники).
Прошил контроллер атмега , через прогу Атмега -Флип, и после прошивки при включенном АПМ горел зеленый светодиод, далее подключил к программе ардукоптер все законнектилось через ЮСБ, далее решил прошить ЖПС, загрузил кастомную прошивку, через У-центр прошил GPS 7М, и обратно вернул прошивку ардукоптера.
потом началась вот такая фигня с подключением:
вот фото платы:
в полном списке параметров MOT_… поменяйте с 70 на 90-100 и будет вам счастье
поменял, но работает через раз…((((
В параметрах фигурирует только параметр EKF_CHECK_THRESH 0.8-1.0 (порог срабатывания FailSafe по EKF)
Я про этот параметр и говорю. Извиняюсь не дописал. У меня параметр EKF_CHECK_THRESH = 0. Вроде отключает проверку. Но не уверен после полетов…
Подскажите плз все таки про вибрации. Они у меня вроде в нитку, но нитка не ровная, волнообразная
Подскажите плз все таки про вибрации. Они у меня вроде в нитку, но нитка не ровная, волнообразная
В том то и дело, что не ровная, а волнообразная и со всплесками. Как-будто АПМ весит на мягких резинках.
Как только коптер взлетел, начались вибрации.
И еще питание АПМ на грани.
Как-будто АПМ весит на мягких резинках.
Спасибо. С пониманием - разобрались. Хотя такой вопрос: я во время тестового полета делал резкие кивки и по питчу и по роллу.
Как надо вибрации проверять? взлетел, повисел, приземлился? Или нужно резко-агрессивно по питчу и роллу его гонять?
И еще, может кто знает, EKF_CHECK_THRESH поставить 0 или 0,9? Нужно что бы фейл сейв с Land-ом не врубался, что бы игнорировались возможные расхождение компаса и GPS.
Дело в том, что все летает, домой возвращается, в лойтере висит, но вот эта ошибка с фейлсевом в виде Land - очень напрягает 😦 Прям как мина замедленного действия!
Заранее спасибо за помощь!
ошибка с фейлсевом в виде Land - очень напрягает
Так поменяйте в полном списке параметров - установите AltHold, например.
Как надо вибрации проверять? взлетел, повисел, приземлился? Или нужно резко-агрессивно по питчу и роллу его гонять?
Для начала просто повесите. Потом сделайте пролет на скорости.
Циклические раскачивания только сбивают с толку.
Так поменяйте в полном списке параметров - установите AltHold, например.
В APM нельзя выставить тип фейлсева по EKF. Land и все. Или я ошибаюсь?
Для начала просто повесите. Потом сделайте пролет на скорости.
Если “просто повесите” - то нитка! Амплитуда колебания ±2.
И все таки, может кто знает, EKF_CHECK_THRESH поставить 0 или 0,9?
Кто с каким летает, подскажите плз!
Кто использовал такие платы АПМ (красного цвета) -???
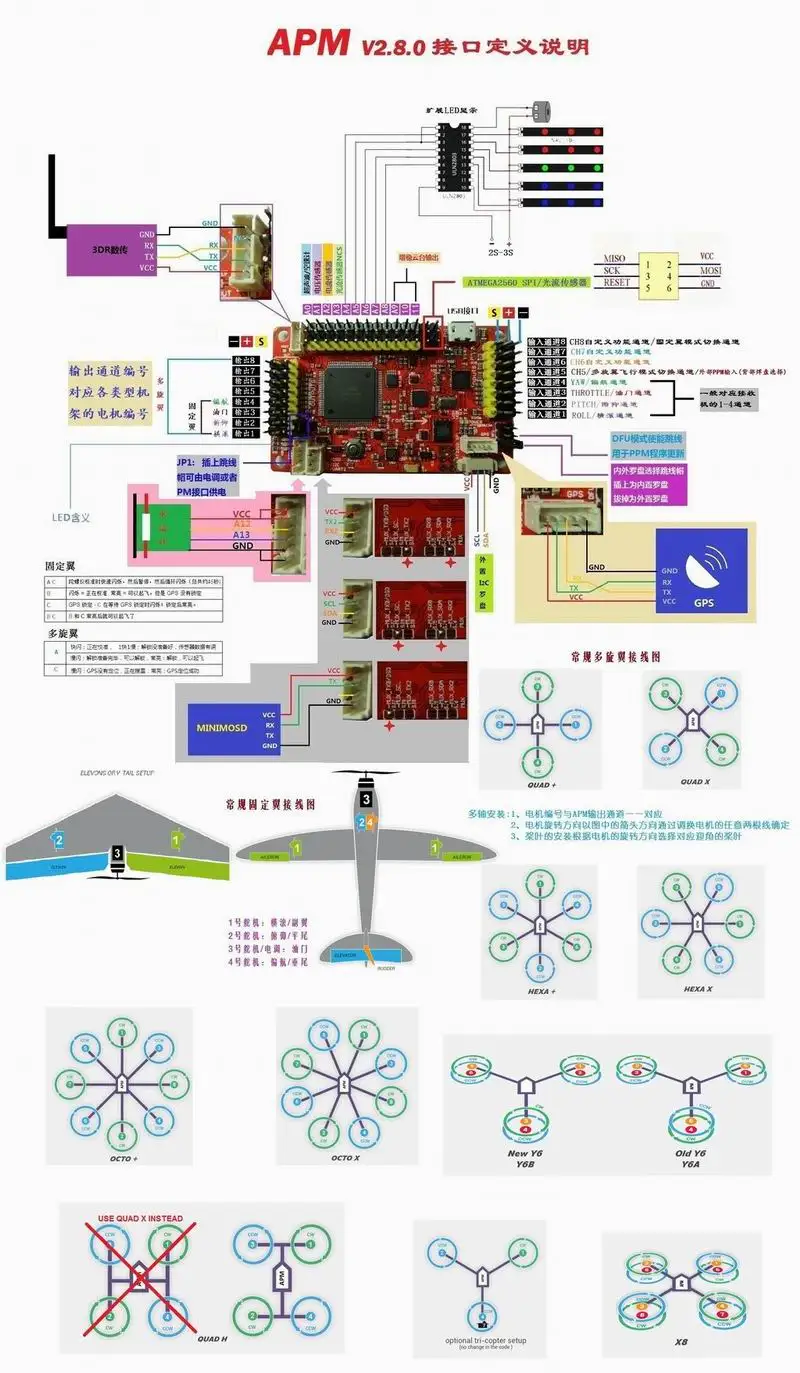
или кто может поделиться ссылкой на продавана с работоспособной АПМ???
В APM нельзя выставить тип фейлсева по EKF. Land и все. Или я ошибаюсь?
Для АРМ EKF вообще бесполезен, только 32 бит Pixhawk и пр.
В оф. доке вроде как сказано что EKF failsafe и работает только на Pixhawk. Для АРМ имеет смысл отключить EKF AHRS_EKF_USE = 0
Если “просто повесите” - то нитка! Амплитуда колебания ±2.
Это не идеал.
А теперь еще при пролете, сразу видно есть ли резонанс.
И что с питанием АПМ. Почему так плохо?
И еще, может кто знает, EKF_CHECK_THRESH поставить 0 или 0,9? Нужно что бы фейл сейв с Land-ом не врубался, что бы игнорировались возможные расхождение компаса и GPS.
!
This check will trigger when the EKF’s compass and velocity “variance” are higher than 0.8 (configurable with EKF_CHECK_THRESH parameter) for one second. This “variance” increases as the estimates become untrustworthy. 0 = very trustworthy, >1.0 = very untrustworthy. If both variances climb above the EKF_CHECK_THRESH parameter (default is 0.8) the EKF/Inav failsafe triggers.
У меня стоит 1.0
чем меньше цифра, тем больше доверяет данным от EKF тригера.
Т.е. по логике при 0 фильтр не работает, . Можно попробовать значение и выше 1.
Для АРМ EKF вообще бесполезен
Ага! Вы это моему контроллеру расскажите! Смотрите принтскрин.
Err: EKF_CHECK-2, потом Err: FAILSAFE_EKF-1 и здрасьте: LAND, плавное снижение и сидим в снегу!
Я по колено в снегу 500 метров ломился - прозрел!
Решил, что надо курить бросать, потому что (не дай бог)- противогаз, калаш и разгрузку не потяну 😃
На скрине ничего не видно.
Коптер можно было вернуть в Стабилайзе.
Добро пожаловать в Ардукоптер! Эта ошибка с ЕКФ вообще не связана на Апм. Привет разработчикам. На Апме ЕКФ не работает.
Коптер можно было вернуть в Стабилайзе.
Первый раз высоты хватило, успел вернуть в стабилайзе. Второй раз летел низко, метров 5 в PosHOLD и не успел среагировать.
Да с пяти метров, даже понять не успеешь, что произошло! )
сказано что EKF failsafe и работает только на Pixhawk. Для АРМ имеет смысл отключить EKF AHRS_EKF_USE = 0
Не нашел такого параметра. APM 2.6, прошивка ArduCopter V3.2.1
Кто-нибудь знает почему?