А давайте обсудим Arducopter - APM

Как надо вибрации проверять? взлетел, повисел, приземлился? Или нужно резко-агрессивно по питчу и роллу его гонять?
Для начала просто повесите. Потом сделайте пролет на скорости.
Циклические раскачивания только сбивают с толку.
Так поменяйте в полном списке параметров - установите AltHold, например.
В APM нельзя выставить тип фейлсева по EKF. Land и все. Или я ошибаюсь?
Для начала просто повесите. Потом сделайте пролет на скорости.
Если “просто повесите” - то нитка! Амплитуда колебания ±2.
И все таки, может кто знает, EKF_CHECK_THRESH поставить 0 или 0,9?
Кто с каким летает, подскажите плз!
Кто использовал такие платы АПМ (красного цвета) -???
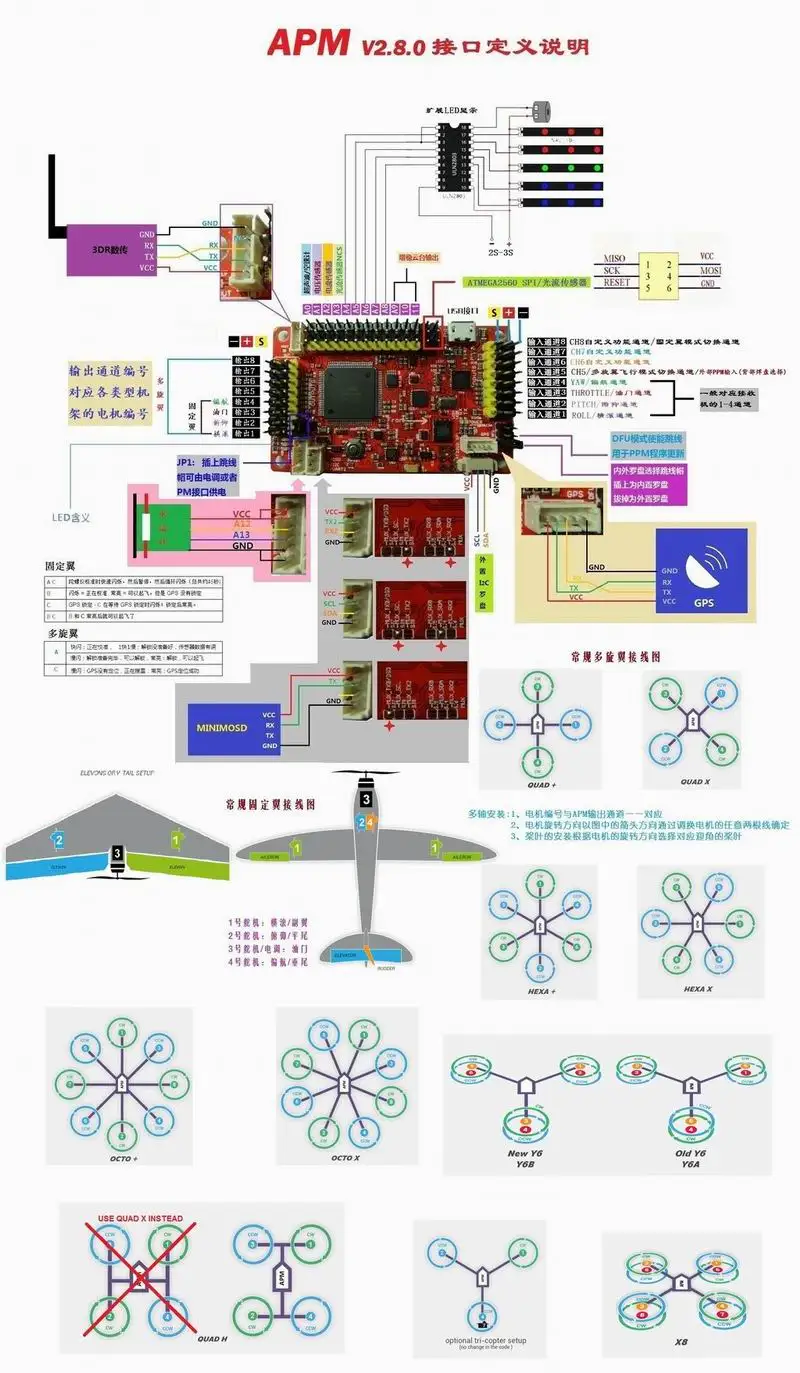
или кто может поделиться ссылкой на продавана с работоспособной АПМ???
В APM нельзя выставить тип фейлсева по EKF. Land и все. Или я ошибаюсь?
Для АРМ EKF вообще бесполезен, только 32 бит Pixhawk и пр.
В оф. доке вроде как сказано что EKF failsafe и работает только на Pixhawk. Для АРМ имеет смысл отключить EKF AHRS_EKF_USE = 0
Если “просто повесите” - то нитка! Амплитуда колебания ±2.
Это не идеал.
А теперь еще при пролете, сразу видно есть ли резонанс.
И что с питанием АПМ. Почему так плохо?
И еще, может кто знает, EKF_CHECK_THRESH поставить 0 или 0,9? Нужно что бы фейл сейв с Land-ом не врубался, что бы игнорировались возможные расхождение компаса и GPS.
!
This check will trigger when the EKF’s compass and velocity “variance” are higher than 0.8 (configurable with EKF_CHECK_THRESH parameter) for one second. This “variance” increases as the estimates become untrustworthy. 0 = very trustworthy, >1.0 = very untrustworthy. If both variances climb above the EKF_CHECK_THRESH parameter (default is 0.8) the EKF/Inav failsafe triggers.
У меня стоит 1.0
чем меньше цифра, тем больше доверяет данным от EKF тригера.
Т.е. по логике при 0 фильтр не работает, . Можно попробовать значение и выше 1.
Для АРМ EKF вообще бесполезен
Ага! Вы это моему контроллеру расскажите! Смотрите принтскрин.
Err: EKF_CHECK-2, потом Err: FAILSAFE_EKF-1 и здрасьте: LAND, плавное снижение и сидим в снегу!
Я по колено в снегу 500 метров ломился - прозрел!
Решил, что надо курить бросать, потому что (не дай бог)- противогаз, калаш и разгрузку не потяну 😃
На скрине ничего не видно.
Коптер можно было вернуть в Стабилайзе.
Добро пожаловать в Ардукоптер! Эта ошибка с ЕКФ вообще не связана на Апм. Привет разработчикам. На Апме ЕКФ не работает.
Коптер можно было вернуть в Стабилайзе.
Первый раз высоты хватило, успел вернуть в стабилайзе. Второй раз летел низко, метров 5 в PosHOLD и не успел среагировать.
Да с пяти метров, даже понять не успеешь, что произошло! )
сказано что EKF failsafe и работает только на Pixhawk. Для АРМ имеет смысл отключить EKF AHRS_EKF_USE = 0
Не нашел такого параметра. APM 2.6, прошивка ArduCopter V3.2.1
Кто-нибудь знает почему?
Не нашел такого параметра. APM 2.6, прошивка ArduCopter V3.2.1
Кто-нибудь знает почему?
Потому, что его там нету. Нет фильтра, значит и отключать нечего.
Единственный параметр связянный с “EKF” ’ это EKF_CHECK_THRESH.
Здраствуйте. Правильно ли я сделал, снял 2 проводка а в инструкции Юлиан снимает один, а если я снимаю один проводок то он всёравно питает апм.
снял 2 проводка
VCC отсоедините и будет вам феншуй
а у меня и с этим модулем хорошо летает 😉 (тьфу трижды)
Всем привет народ. У меня три вопроса поможет кто нибудь?
- имеет ли разница версия прошивки для Экспорт/импорт настроек прошивки?
- Какая прошивка максимально стабильная для полетов с вдаль?
- В программе Мишен Планер мой самолет отображен в красном кругу Аэропорта, что это именно?
VCC отсоедините и будет вам феншуй
а у меня и с этим модулем хорошо летает 😉 (тьфу трижды)
Оба?
Можно взять вольтметр и померить, оба или два. Совсем элементарные вещи уже.
Оба?
элементарные вещи
да
Ребята, можно ли менять Loiter maximum horizontal speed на например 15м/с? Сейчас стоит 7м/с. Если например, коптер не сможет развить такую скорость то всёравно полетит на максимальной которую он может развить?
Если например, коптер не сможет развить такую скорость то всёравно полетит на максимальной которую он может развить?
Да.
А сколько нужно минимальное напряжение подавать на телеметрию апм? Подаю 3.3в работает в этом напряжение не упадет ли мощность телеметрии?