А давайте обсудим Arducopter - APM

Может быть, PIDы не настроены, и коптер не попадает в заданный угол? Увидеть бы логи Pitch, DesPitch. Иван, вы автотюн делали, PID настраивали?
Нет не делал. Не вижу в нем смысла. У меня он летает как по рельсам. Всё чётко. Ну вот кроме этой проблемы. И лазить в настройках неохота на угад так как я в коптерах чайник вот и решил тут спросить. Может это проблема не только у меня и кто-то знает точно что крутить
Вот единственно что похоже на мою проблему и что надо крутить:Параметр Loiter PID P (в правом верхнем углу на картине выше) используется для конпенсации ошибок горизонтального положения (то есть разница между желаемой и фактической позицией) до желаемой скорости по направлению к целевой позиции. Как правило не требует регулировки. Но с версии 3.х рекомендуется установить в значение 0.2 иначе квадрокоптер будет бешено менять позицию. А у меня там стоит 1.000 как думаете в этом проблема?
Кое как разобрался как тут изображение вставить)))
Я пиды настраивал по видео Юлиана, да и вообщем все настраивал как у него.да и из пидов то только настроил Rate roll P
Когда коптер в режиме Loiter и например жму чтоб он летел вперёд то он летит вперёд, но летит не стабильно а как бы рывками то сильнее наклоняясь вперёд то слобее, а я стик держу вперёд стабильно до конца. Как победить такое поведение?
А попробуйте проверить центровку квадрика. Например, у моего TBS Discovery нарисован кружочек где должен быть Ц.Т. Регулируется попадаемость центра гравитации в кружочек путём перемещения аккумулятора. А у Вас как и где этот центр гравитации?
У меня такая же рама ЦТ я сделал ровно по этой точке. Тут именно видно что в настройках что-то APM. Такое ощущение что я стик до конца отклоняю вперёд и коптер наклонятся на максимальный угол вперёд, но в режиме loiter есть ограничение по скорости и вот когда он дастигает этой скорости то он выравнивается в горизонт, когда скорость чуть меньше станет он опять наклонится вперёд на максимальный угол.вот так при движении в loiter он у меня и качается. А как это исправить?
А попробуйте проверить центровку квадрика. Например, у моего TBS Discovery нарисован кружочек где должен быть Ц.Т. Регулируется попадаемость центра гравитации в кружочек путём перемещения аккумулятора. А у Вас как и где этот центр гравитации?
Если память мне не изменяет как раз на TBS кружочек нарисован не где центр тяжести должен быть, а где линии, соедяняющие моторы пересекаются. Хотя может сейчас и поменяли место этого кружочка. Но года 4 назад он точно там был. Даже на форуме обсуждалось это. Реальный центр тяжести кажется смещен от него на 1,5 см что ли. Я на своем специально проверял. Реально так оказалось. Даже помню чертеж с моментами сил делал, чтобы определить ЦТ. Но это речь об родной раме TBS.
Такое ощущение что я стик до конца отклоняю вперёд и коптер наклонятся на максимальный угол вперёд, но в режиме loiter есть ограничение по скорости и вот когда он дастигает этой скорости то он выравнивается в горизонт, когда скорость чуть меньше станет он опять наклонится вперёд на максимальный угол.вот так при движении в loiter он у меня и качается.
Когда АПМ в лойтере набирает максимум скорости, то он потом вообще-то ее держит, если нет ошибок или вибрация не мешает. Специально проверял - держит четко.
Так я знаю что должен держать))))) а у меня качается вот и пишу тут может кто знает что покрутить надо
Если память мне не изменяет как раз на TBS кружочек нарисован не где центр тяжести должен быть, а где линии, соедяняющие моторы пересекаются. Хотя может сейчас и поменяли место этого кружочка. Но года 4 назад он точно там был. Даже на форуме обсуждалось это. Реальный центр тяжести кажется смещен от него на 1,5 см что ли. Я на своем специально проверял. Реально так оказалось. Даже помню чертеж с моментами сил делал, чтобы определить ЦТ. Но это речь об родной раме TBS.
А по мне так центр тяжести вообще влияет только на нагруженнось маторов. У меня запас тяги хватает за глаза если даже центр на 1.5см не правильно. Моторы и регули после 22 мин. полёта холодные так что я за это не парюсь
Когда АПМ в лойтере набирает максимум скорости, то он потом вообще-то ее держит, если нет ошибок или вибрация не мешает. Специально проверял - держит четко.
Посмотри пожалуйста если не трудно какое значение стоит у вас Loiter PID P
Вы можете сохранить свои текущие параметры в файл, затем сбросить все параметры на значения по-умолчанию. Посмотрите какой Loiter PID P по дефолту и верните свои настройки из файла обратно.
У меня Loiter PID P стоит 1.0000 я его и не трогал и я вообще не знаю правильно ли я на эти пораметры грешу или дело вовсе не вних
Посмотри пожалуйста если не трудно какое значение стоит у вас Loiter PID P
У меня было по умолчанию.
0т этого параметра зависит удержание позиции на месте.
Так какие тогда значения отвечают за наклон квадрика в режиме loiter?
Максимальный угол по ролл и питч.
Угловое ускорение.
Но это не причина Вашей проблемы.
Просто перепиской Вы решение не найдете.
Пока не будет данных для анализа можно только бестолку гадать о проблеме.
Ладно понятно я сейчас в отпуске, приеду домой буду разбираться с логами если без них ни как
А по мне так центр тяжести вообще влияет только на нагруженнось маторов. У меня запас тяги хватает за глаза если даже центр на 1.5см не правильно. Моторы и регули после 22 мин. полёта холодные так что я за это не парюсь
Может на температуру моторов не влияет, однако влияет на управляемость! Во вложении рисунок по которуму я установил центр гравитации - он впереди, т.е. я делал по рисунку. Во вложении скрин моих настроек, следует помнить, что переходить к другим режимам нужно когда настроен режим STAB. Можете попробовать с моими пидами, обратите внимание мой квадрик весит 1700 г, чем больше вес тем больше величина пидов из-за проявления инерции. Т.е. для лёгких квадриков пиды меньше, а у Вас многовато будет.
Обратите внимание на несиметрию настроек по RATE Pitch, потому что по ролу и питчу момент инерции отличается из-за разного распределения массы. По ролу легче крутится чем по питчу поэтому там коэффициент больше. Также не настраивайте пиды на пределе - это подходит для гоночных где добиваются быстрого отклика на стики, а здесь пусть будет тупо лететь, но устойчиво.
Есть такой ещё нюанс в настойке пидов. Я по своей профессии был связан с настройкой промышленных контроллеров, так вот в таких контроллерах предусматривается автоматическое переключение на наборы параметров ПИД в зависимости от условий регулирования. В нашем квадролётном случае , например, с набором высоты меняется давление, температура, влажность, а с этим изменяется плотность воздуха, пропеллерам труднее создавать тягу на больших высотах, поэтому с набором высоты нужен другой набор параметров. Может знатоки подскажут в Пиксе или где это реализовано или в проекте?
Если кто хочет изучить инженерный подход к вопросу ПИД рекомендую книгу с хорошим английским, которую можно скачать в интернете Control engineering: A guide for beginners Manfred Schleicher, Frank Blasinger Там рассмотрены не только температурные процессы, но и электромеханические. Я по ней учился по настройке промышленных контроллеров, прекрасный город Фульда …
Обратите внимание на несиметрию настроек по RATE Pitch, потому что по ролу и питчу момент инерции отличается из-за разного распределения массы.
Вообще ничего не разобрать.
Вообще ничего не разобрать.
А так лучше?
Может на температуру моторов не влияет, однако влияет на управляемость! Во вложении рисунок по которуму я установил центр гравитации - он впереди, т.е. я делал по рисунку. Во вложении скрин моих настроек, следует помнить, что переходить к другим режимам нужно когда настроен режим STAB. Можете попробовать с моими пидами, обратите внимание мой квадрик весит 1700 г, чем больше вес тем больше величина пидов из-за проявления инерции. Т.е. для лёгких квадриков пиды меньше, а у Вас многовато будет.
Обратите внимание на несиметрию настроек по RATE Pitch, потому что по ролу и питчу момент инерции отличается из-за разного распределения массы. По ролу легче крутится чем по питчу поэтому там коэффициент больше. Также не настраивайте пиды на пределе - это подходит для гоночных где добиваются быстрого отклика на стики, а здесь пусть будет тупо лететь, но устойчиво.
Есть такой ещё нюанс в настойке пидов. Я по своей профессии был связан с настройкой промышленных контроллеров, так вот в таких контроллерах предусматривается автоматическое переключение на наборы параметров ПИД в зависимости от условий регулирования. В нашем квадролётном случае , например, с набором высоты меняется давление, температура, влажность, а с этим изменяется плотность воздуха, пропеллерам труднее создавать тягу на больших высотах, поэтому с набором высоты нужен другой набор параметров. Может знатоки подскажут в Пиксе или где это реализовано или в проекте?
Если кто хочет изучить инженерный подход к вопросу ПИД рекомендую книгу с хорошим английским, которую можно скачать в интернете Control engineering: A guide for beginners Manfred Schleicher, Frank Blasinger Там рассмотрены не только температурные процессы, но и электромеханические. Я по ней учился по настройке промышленных контроллеров, прекрасный город Фульда …
У меня квадрик летает в режиме Stabilize, AltHold как по рельсам, в RTL тоже домой прилетает чётко. У меня только проблема в режиме Loiter при движении он качается, а если стик отпустить то висит чётко. Вот такая проблема
Коллеги, добрый день! Я извиняюсь, что не в тему, но уже мозг сломал. Пробую поставить АРМ 2.8 на свой гусеничный проект. Попробовал залить прошиву для Roverа, но там только серва и один мотор управляется, мне же нужно два мотора крутить (каждый на своей стороне), подскажите вычитал на просторах, народ для этих целей меняет параметр SKID_STEER_OUT, кто-то может подсказать какие могут быть значения и за что он отвечает? Крайне мало информации нашел, может тут посоветует кто. Спасибо!
Я разве этот параметр есть? Его же убрали вроде как? Вместо него так теперь
Skid Steering¶
“Skid steering” vehicles (like R2D2) control their direction and forward/reverse motions by varying the speed of two (or more) independent wheels. For these style rovers the left wheel should be connected to RC Output 1 and the right wheel should be connected to RC Output 3.
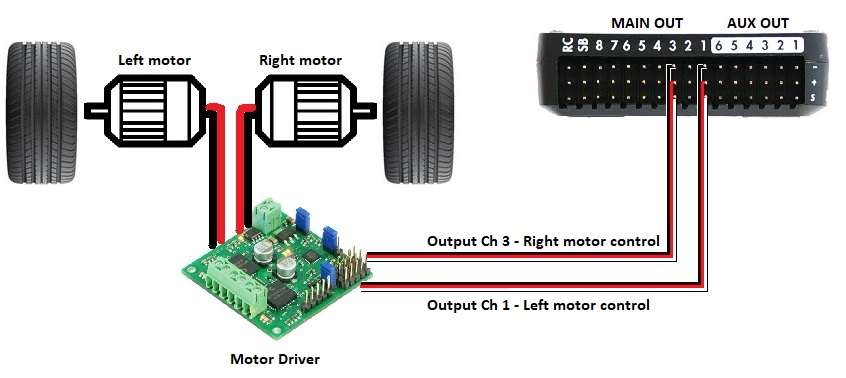
For this setup these parameters values will need to be set. More details can be found on the Motor and Servo Configuration page.
- SERVO1_FUNCTION = 73 (Throttle Left)
- SERVO3_FUNCTION = 74 (Throttle Right)
Хотя это к пиксу видимо. А в APM возможно по -старому осталось.
Спасибо, разобрался вроде. А еще не могу понять, почему у меня во вкладкн Servo outputs, не активны выпадающие окна для настройки. Только полоски сигналов двигаются когда стиками двигаю.
А еще не могу понять, почему у меня во вкладкн Servo outputs, не активны выпадающие окна для настройки.
прошивка апм уже не облвляется несколько лет, а мишен планер продолжает развиваться