А давайте обсудим Arducopter - APM

Вы можете сохранить свои текущие параметры в файл, затем сбросить все параметры на значения по-умолчанию. Посмотрите какой Loiter PID P по дефолту и верните свои настройки из файла обратно.
У меня Loiter PID P стоит 1.0000 я его и не трогал и я вообще не знаю правильно ли я на эти пораметры грешу или дело вовсе не вних
Посмотри пожалуйста если не трудно какое значение стоит у вас Loiter PID P
У меня было по умолчанию.
0т этого параметра зависит удержание позиции на месте.
Так какие тогда значения отвечают за наклон квадрика в режиме loiter?
Максимальный угол по ролл и питч.
Угловое ускорение.
Но это не причина Вашей проблемы.
Просто перепиской Вы решение не найдете.
Пока не будет данных для анализа можно только бестолку гадать о проблеме.
Ладно понятно я сейчас в отпуске, приеду домой буду разбираться с логами если без них ни как
А по мне так центр тяжести вообще влияет только на нагруженнось маторов. У меня запас тяги хватает за глаза если даже центр на 1.5см не правильно. Моторы и регули после 22 мин. полёта холодные так что я за это не парюсь
Может на температуру моторов не влияет, однако влияет на управляемость! Во вложении рисунок по которуму я установил центр гравитации - он впереди, т.е. я делал по рисунку. Во вложении скрин моих настроек, следует помнить, что переходить к другим режимам нужно когда настроен режим STAB. Можете попробовать с моими пидами, обратите внимание мой квадрик весит 1700 г, чем больше вес тем больше величина пидов из-за проявления инерции. Т.е. для лёгких квадриков пиды меньше, а у Вас многовато будет.
Обратите внимание на несиметрию настроек по RATE Pitch, потому что по ролу и питчу момент инерции отличается из-за разного распределения массы. По ролу легче крутится чем по питчу поэтому там коэффициент больше. Также не настраивайте пиды на пределе - это подходит для гоночных где добиваются быстрого отклика на стики, а здесь пусть будет тупо лететь, но устойчиво.
Есть такой ещё нюанс в настойке пидов. Я по своей профессии был связан с настройкой промышленных контроллеров, так вот в таких контроллерах предусматривается автоматическое переключение на наборы параметров ПИД в зависимости от условий регулирования. В нашем квадролётном случае , например, с набором высоты меняется давление, температура, влажность, а с этим изменяется плотность воздуха, пропеллерам труднее создавать тягу на больших высотах, поэтому с набором высоты нужен другой набор параметров. Может знатоки подскажут в Пиксе или где это реализовано или в проекте?
Если кто хочет изучить инженерный подход к вопросу ПИД рекомендую книгу с хорошим английским, которую можно скачать в интернете Control engineering: A guide for beginners Manfred Schleicher, Frank Blasinger Там рассмотрены не только температурные процессы, но и электромеханические. Я по ней учился по настройке промышленных контроллеров, прекрасный город Фульда …
Обратите внимание на несиметрию настроек по RATE Pitch, потому что по ролу и питчу момент инерции отличается из-за разного распределения массы.
Вообще ничего не разобрать.
Вообще ничего не разобрать.
А так лучше?
Может на температуру моторов не влияет, однако влияет на управляемость! Во вложении рисунок по которуму я установил центр гравитации - он впереди, т.е. я делал по рисунку. Во вложении скрин моих настроек, следует помнить, что переходить к другим режимам нужно когда настроен режим STAB. Можете попробовать с моими пидами, обратите внимание мой квадрик весит 1700 г, чем больше вес тем больше величина пидов из-за проявления инерции. Т.е. для лёгких квадриков пиды меньше, а у Вас многовато будет.
Обратите внимание на несиметрию настроек по RATE Pitch, потому что по ролу и питчу момент инерции отличается из-за разного распределения массы. По ролу легче крутится чем по питчу поэтому там коэффициент больше. Также не настраивайте пиды на пределе - это подходит для гоночных где добиваются быстрого отклика на стики, а здесь пусть будет тупо лететь, но устойчиво.
Есть такой ещё нюанс в настойке пидов. Я по своей профессии был связан с настройкой промышленных контроллеров, так вот в таких контроллерах предусматривается автоматическое переключение на наборы параметров ПИД в зависимости от условий регулирования. В нашем квадролётном случае , например, с набором высоты меняется давление, температура, влажность, а с этим изменяется плотность воздуха, пропеллерам труднее создавать тягу на больших высотах, поэтому с набором высоты нужен другой набор параметров. Может знатоки подскажут в Пиксе или где это реализовано или в проекте?
Если кто хочет изучить инженерный подход к вопросу ПИД рекомендую книгу с хорошим английским, которую можно скачать в интернете Control engineering: A guide for beginners Manfred Schleicher, Frank Blasinger Там рассмотрены не только температурные процессы, но и электромеханические. Я по ней учился по настройке промышленных контроллеров, прекрасный город Фульда …
У меня квадрик летает в режиме Stabilize, AltHold как по рельсам, в RTL тоже домой прилетает чётко. У меня только проблема в режиме Loiter при движении он качается, а если стик отпустить то висит чётко. Вот такая проблема
Коллеги, добрый день! Я извиняюсь, что не в тему, но уже мозг сломал. Пробую поставить АРМ 2.8 на свой гусеничный проект. Попробовал залить прошиву для Roverа, но там только серва и один мотор управляется, мне же нужно два мотора крутить (каждый на своей стороне), подскажите вычитал на просторах, народ для этих целей меняет параметр SKID_STEER_OUT, кто-то может подсказать какие могут быть значения и за что он отвечает? Крайне мало информации нашел, может тут посоветует кто. Спасибо!
Я разве этот параметр есть? Его же убрали вроде как? Вместо него так теперь
Skid Steering¶
“Skid steering” vehicles (like R2D2) control their direction and forward/reverse motions by varying the speed of two (or more) independent wheels. For these style rovers the left wheel should be connected to RC Output 1 and the right wheel should be connected to RC Output 3.
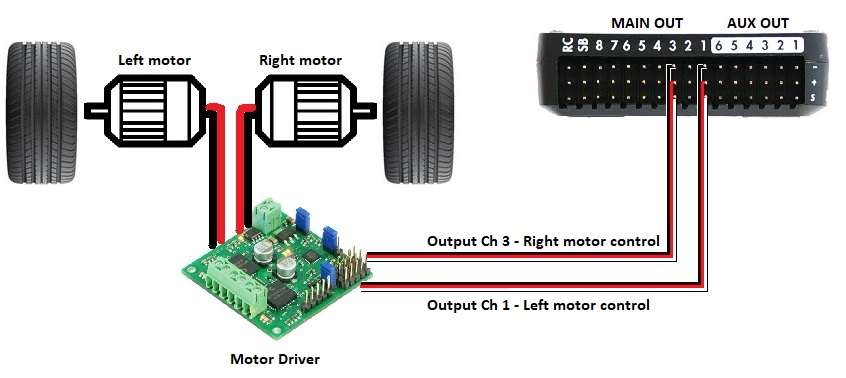
For this setup these parameters values will need to be set. More details can be found on the Motor and Servo Configuration page.
- SERVO1_FUNCTION = 73 (Throttle Left)
- SERVO3_FUNCTION = 74 (Throttle Right)
Хотя это к пиксу видимо. А в APM возможно по -старому осталось.
Спасибо, разобрался вроде. А еще не могу понять, почему у меня во вкладкн Servo outputs, не активны выпадающие окна для настройки. Только полоски сигналов двигаются когда стиками двигаю.
А еще не могу понять, почему у меня во вкладкн Servo outputs, не активны выпадающие окна для настройки.
прошивка апм уже не облвляется несколько лет, а мишен планер продолжает развиваться
если вы используете автовзлет с полосы то компас необходим, в остальных случаях он желателен но необязателен.
Я планирую использовать его на летающем крыле. Крыло AR.Wing + Mini Pix от Radiolink с последней прошивкой (ChibiOS). Не хочется резать тушку и где-то на консолях размещать антенну. Так как внутри много места. Т.е смело можно отключить оба компаса?
Подскажите пожалуйста при переходе с карбоновых винтов 11.55 на АРС 11.45 в какую сторону на много ли и какие из пидов изменить ? Двигатели Mltistar 4220-880 батарея 3s.
Настройки на карбоне такие:
Всем доброго дня! Чуток разобрался. У меня пульт как на видео, но Mode-1, т.е. газ справа, поэтому пришлось поменять местами 1 и 4 каналы. Теперь армится, движки запускаются, но сразу обороты примерно на полгаза и не регулируются. Только когда стик газа на 0, выключаются. Стик вверх чуть чуть, снова большие обороты. Движки калибровал через подключенный АРМ, все отлично, газ регулируется от 0 до 100. После выключения борта и включения, газ на нуле, стиг газа вправо вниз, армится и история, что описал выше. Что посоветуете проверить?
поэтому пришлось поменять местами 1 и 4 каналы
Но ведь стик на пульте - это 2 канала. У вас газ остался на левом стике?
Газ остался на правом стике (моде-1). Настройки сброшены на заводские - проверил все каналы, расходы на -100 и +100, миксы все отключены. Попробую сбросить все настройки АРМ и заново откалибровать. Приемыш РРМ поддерживает, но пока попробую без РРМ.
Про РРМ. В этой аппе выходы каналов приемника с 1 по 4 программно не переназначить. Поэтому при РРМ на входе АРМ каналы будут 1-2-3-4, а мне нужно 4-2-3-1. Или я ошибаюсь?
Доброго дня друзья. Настроил пиды в Стабе все отлично. А в Лоитере после остановки раскачка сильная в несколько колебаний. Может кто знает куда дели настройки пидов режима Лоитер?
Все настройки на общей странице (включая и для лойтера).
Настройка пидов в стабе влияет и на лойтер. Или пиды до конца не настроены, или вмг слабое и не может справиться с раскачкой.
В стабе раскачку на спуске проверяли?