А давайте обсудим Arducopter - APM

Я разве этот параметр есть? Его же убрали вроде как? Вместо него так теперь
Skid Steering¶
“Skid steering” vehicles (like R2D2) control their direction and forward/reverse motions by varying the speed of two (or more) independent wheels. For these style rovers the left wheel should be connected to RC Output 1 and the right wheel should be connected to RC Output 3.
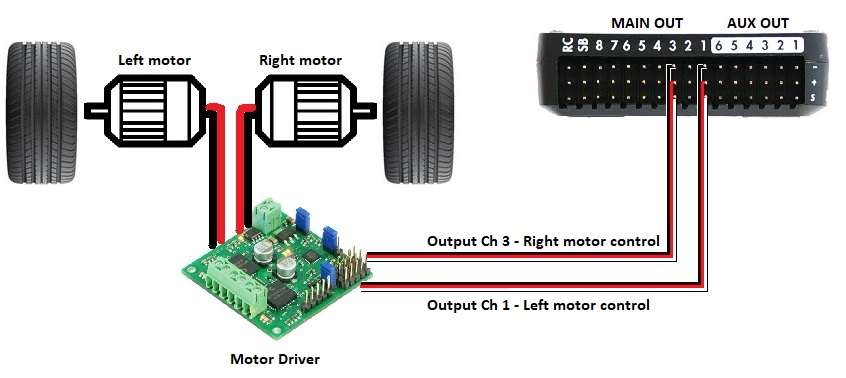
For this setup these parameters values will need to be set. More details can be found on the Motor and Servo Configuration page.
- SERVO1_FUNCTION = 73 (Throttle Left)
- SERVO3_FUNCTION = 74 (Throttle Right)
Хотя это к пиксу видимо. А в APM возможно по -старому осталось.
Спасибо, разобрался вроде. А еще не могу понять, почему у меня во вкладкн Servo outputs, не активны выпадающие окна для настройки. Только полоски сигналов двигаются когда стиками двигаю.
А еще не могу понять, почему у меня во вкладкн Servo outputs, не активны выпадающие окна для настройки.
прошивка апм уже не облвляется несколько лет, а мишен планер продолжает развиваться
если вы используете автовзлет с полосы то компас необходим, в остальных случаях он желателен но необязателен.
Я планирую использовать его на летающем крыле. Крыло AR.Wing + Mini Pix от Radiolink с последней прошивкой (ChibiOS). Не хочется резать тушку и где-то на консолях размещать антенну. Так как внутри много места. Т.е смело можно отключить оба компаса?
Подскажите пожалуйста при переходе с карбоновых винтов 11.55 на АРС 11.45 в какую сторону на много ли и какие из пидов изменить ? Двигатели Mltistar 4220-880 батарея 3s.
Настройки на карбоне такие:
Всем доброго дня! Чуток разобрался. У меня пульт как на видео, но Mode-1, т.е. газ справа, поэтому пришлось поменять местами 1 и 4 каналы. Теперь армится, движки запускаются, но сразу обороты примерно на полгаза и не регулируются. Только когда стик газа на 0, выключаются. Стик вверх чуть чуть, снова большие обороты. Движки калибровал через подключенный АРМ, все отлично, газ регулируется от 0 до 100. После выключения борта и включения, газ на нуле, стиг газа вправо вниз, армится и история, что описал выше. Что посоветуете проверить?
поэтому пришлось поменять местами 1 и 4 каналы
Но ведь стик на пульте - это 2 канала. У вас газ остался на левом стике?
Газ остался на правом стике (моде-1). Настройки сброшены на заводские - проверил все каналы, расходы на -100 и +100, миксы все отключены. Попробую сбросить все настройки АРМ и заново откалибровать. Приемыш РРМ поддерживает, но пока попробую без РРМ.
Про РРМ. В этой аппе выходы каналов приемника с 1 по 4 программно не переназначить. Поэтому при РРМ на входе АРМ каналы будут 1-2-3-4, а мне нужно 4-2-3-1. Или я ошибаюсь?
Доброго дня друзья. Настроил пиды в Стабе все отлично. А в Лоитере после остановки раскачка сильная в несколько колебаний. Может кто знает куда дели настройки пидов режима Лоитер?
Все настройки на общей странице (включая и для лойтера).
Настройка пидов в стабе влияет и на лойтер. Или пиды до конца не настроены, или вмг слабое и не может справиться с раскачкой.
В стабе раскачку на спуске проверяли?
ВМГ сильное газ висения 40% пиды в стабе устраивают там раскачки нет после остановки. Только в режиме лоитер. Раньше в старых версиях Мишн планер были отдельные пиды режима лоитер. Сейчас их там нет … Раскачка на спуске есть но тут другая тема… моторы 100kv и 30 пропы…
Ура!!! Сбросил настройки в МП. Заново все перекалибровал. Все заработало. Сейчас учу теорию, жду антивибро платформу и буду пробовать. Это видео по аппаратуре смотрел, спасибо! Спасибо всем откликнувшимся! Удачных полетов!
это только у меня не обновляетса ???
ВМГ сильное газ висения 40% … моторы 100kv и 30 пропы…
При 30-х скорее медленное (слабое), не способное быстро реагировать. Я подозреваю, что напряжение не максимальное.
Раньше в старых версиях Мишн планер были отдельные пиды режима лоитер.
Что-то не припоминаю, чтобы были настройки лойтера от раскачки. Скорее только для удержания позиции. Насколько помню, всегда были рекомендации сначала настроить стаб, потом все остальное. И если не хватает в лойтере, то дальше настраивать в стабе. О чем в теме про пиксы вам и подтвердили.
Напряжение максимальное 12s. В стабе все безупречно.Без лишних движений. А а лоитере после остановки 3 качка происходит до полной стабилизации.
В стабе все безупречно.Без лишних движений.
Вам в теме про пиксы уже ответили даже из опыта. Какие еще доводы нужны?
Ну не хватает обычных пидов. Поднимите и будет счастье. Кстати раскачка на спуске косвенно это подтверждает.
А не пора ли прикрутить лидар. Тему давно не курил… Но лидар не на землю, а на раму. Препятствия … по лабиринтам гонять. Самое то будет. И не дорого, но главное достойно;) С весом у лидаров уже нормуль
Приветствую!
При просмотре логов в MP, увидел, что Alt показывает действительную высоту, а BarAlt показывает 0. При полете в AltHold коптер гуляет по высоте.
Продуть барометр? Поролон установлен.
APM 2.8
А не пора ли прикрутить лидар.
Это не то, Нуно с обзором по периметру спереди ± 45 градусов, для обхода препятствий по не четкой свободной логике. А тут просто контроль высоты…банально и тем более, даже это древнее, не у нас . Мельчаем ОднакО.
Нуно с обзором по периметру спереди