А давайте обсудим Arducopter - APM

Да.
Отсюда классический вывод, Сначала настройте стаб , а в лойтере уже будет стабильнее.
в стабе в принципе все хороше кроме быстрого спуска и стабилизации после него.
в стабе в принципе все хороше кроме быстрого спуска и стабилизации после него.
Ну так на спуске и делается окончательно настройка в стабе. После этого в лойтере будет хорошо. В крайнем случае останется стабилизацию для лойтера настроить , к примеру при сильной реакции на стик - уменьшить и наоборот.
Мужики, есть идея, нужен совет.
поскольку официалы отказались от поддержки новых версий ардукоптера для контроллера АПМ то идея в том что основываясь на ништяках крайней прошивки ардукоптера под апм сделать свою версию. убрать ненужное, сомнительное, добавить стабильности т.е. сделать для апм прошивку которая будет летать лучше чем пикс.
собственно первый шаг я сделал, вырезав из прошивки бинарные протоколы навигационных модулей и оставив унверсальный NMEA освободил 20кб флеша.
сделанные мною наблюдения что причиной непредвиденного повердения в удержании позиции может быть инерциалка, опцию ее выключения я тоже сделал.
с тем чтобы небыло дерготни от разброса точек получаемых от жпс - сделан фильтр навигационных данных.
собрана прошивка под апм2 и проверна в настольных условиях.
прошивку не хочу пока публиковать пока ее не облетают более менее грамотные ардукоптерщики, не выскажут свое мнение, после чего возможно дораотаем с учетом пожеланий, напишем мнуал по тюнингу и выдадим публике.
поэтому на данном этапе нужен “клуб” (закрытое или открытое обсуждение) опытных апмщиков желающих облетывать, наблюдать и делиться наблюдениями.
вопросы.
- где бы пристроиться. варианты 1. в дневниках рцдизайна - ибо шапка. 2. на форуме apmcopter - там можно модерируюмую шапку прямо в обсуждении сделать.
- есть ли тут те кто хочет и может развивать апм?
Алексей, вы хотите полностью код 3.3+ адаптировать под АПМ?
Какие плюшки может АПМ получить? Почитал патчноты
наиболее значимое на мой взгляд
b) increased accelerometer range from 8G to 16G to reduce chance of climb due to high vibrations (requires accel calibration)
a) improved landing on slopes
a) SToRM32 gimbal support (using MAVLink) думаю 100% не влезет
a) PID scaling for battery voltage (disabled by default, see MOT_THST_BAT_ parameters)
- думаю дневник+apmcopter.
- попытка не пытка, как говорится, но помоему пациент скорее мертв 😃
PS. Альфа тестером быть не готов но бета тестером могу бы попытаться 😃
с тем чтобы небыло дерготни от разброса точек получаемых от жпс - сделан фильтр навигационных данных.
под одной строчкой “сделан фильтр” - годы наблюдений, один год теоретических изысканий, обсуждения с коллегами, полгода моделирования поведения различных алгоритмов, три месяца реализации и допиливания под арду.
основа будет ардукоптер 3.2
постепенно подтяну туда наиболее значимые ништяки из 3.2.1 и последующих прошивок.
разумеется не емкие по объему кода. т.е. лидар и прочее скорее всего не вариант.
скалировать по напряжению батареи - можно, но от себя замечу что оттюнингованный на низком напряжении аппарат как правило идеально работает во всем диапазоне питающих напряжений
increased accelerometer range from 8G to 16G to reduce chance of climb due to high vibrations (requires accel calibration)
увеличение рабочего диапазона акселя приводит к загрублению его чувствительности т.к число бит на единицу ускорения становится вдвое меньше. имхо
а вот мой фильтр применить к акселю - надо будет попробовать. вопрос хватит ли производительности проца.
a) improved landing on slopes
про это не в курсе, в чем это выражено?
Какие плюшки может АПМ получить?
суть в том что не гоняться за новыми плюшками как это делают дидронесы
а направить усилия в созидательное русло - получение мегастабильной прошивы
саму прошиву можно поделить на две субверсии.
тестовую
- терминал
- логирование всего
- автотюн
боевую
-сервогимбал (если вдруг кому надо)
-ретракты
-ограниченное логирование
-парашют
-прочее нужное
поскольку версия параметров будет идентичная то прошивы можно будет перегружать без необходимости каждый раз перезаливать параметры или перекалибровывать все заново
Я думаю сразу в 2 местах будет непродуктивно.
Формат дневника хорош тем , что основной текст всегда перед глазами и можно править.
Хотя и на апмкоптере есть что-то подобное и даже оформлено общим списком настроек. Наверно лучше на апм.
Помочь всегда можно пока есть контроллер , по мере возможности.
увеличение рабочего диапазона акселя приводит к загрублению его чувствительности т.к число бит на единицу ускорения становится вдвое меньше. имхо а вот мой фильтр применить к акселю - надо будет попробовать. вопрос хватит ли производительности проца.
если сохранить предыдущее разрешение измерений акселерометра то загрубления не произойдет как мне кажется. Но конечно объем вычислений возрастет как минимум в 2 раза.
про это не в курсе, в чем это выражено?
как это проявляется честно не в курсе. По переводу как понял - лучше работает автопосадка на неровной поверхности.
По поводу мегастабильности. Если честно то на 3.2.1 отлетал пару десятков аккумуляторов уже. Железо у меня отнюдь не идеальное и топовое но каких то особых косяков и глюков не случалось. Сейчас даже прикрепил апм на скотч без всяких виброразвязок. Летал в -15, полет нормальный.
Сейчас даже прикрепил апм на скотч без всяких виброразвязок. Летал в -15, полет нормальный.
суть в том что тоже все летает 3.1 - 3.2 за исключением известной 3.12
но есть нюансов и наблюдений несколько, тоесть редко встречающихся эффектов.
“туалетная воронка” если на компас сильно влияют магнитные поля. ошибка компаса - минимальна скажем 15 градусов . ну и пусть бы он шел к цели по дуге.
но изза ошибки компаса инерциалка внутри делает доворот и копится инерциальная ошибка и эта ошибка приводит к тому что компас надо четко блюсти и калибровать если месность иная чем там где привык летать и проверять на адекват
скалировать по напряжению батареи - можно, но от себя замечу что оттюнингованный на низком напряжении аппарат как правило идеально работает во всем диапазоне питающих напряжений
Неправда ваша, при переходе с 3S на 4S мой коптер начинает осцилировать, при настройке на 4S и обратном переходе на 3S становится вяловатым. Ну и в добавок почему не подумать об автоматическом переключении battery failsafe, на установленый тип батареи?
Я готов быть бетатестером.
Где поститься мне не важно.
optic flow хочу, он с какой версии полноценно поддерживается? вчера пол ночи устанавливал, сегодня вышел в поле а режима включения OF_Loiter не побнаружил 😃
3S 4S это уже слишком большой перепад напряжений. Скалировать это для компенсации разрядки батареи.
и обратном переходе на 3S становится вяловатым
ну вяловат ведь не на столько чтобы нелетабельно, исклчительно комфорта ради. а в пределах заряженой - разряженой батареи вообще минимум.
но раз нужно - сделаю. есть пример пидов стабилизации оптимальных для вашего случая под 3 и 4 банки?
под 3 и 4 банки
Было бы удобно каким то образом менять пиды как в cc3d. Чтобы просто хотя бы 2 набора пидов под разные аккумы или нагрузки. Иначе всё это как то бессмысленно.
Чтобы просто хотя бы 2 набора пидов под разные аккумы или нагрузки
Так есть же сохранение и загрузка параметров… Сделали один набор параметров - сохранили… Так же со вторым/третьим и так далее… По месту и задаче загружаете нужный… Вроде по Мавлинку это можно делать…
Было бы удобно каким то образом менять пиды как в cc3d. Чтобы просто хотя бы 2 набора пидов под разные аккумы или нагрузки.
а как это реализовано там?
Вставлю свои пять копеек про ардукоптер. Два года назад приобрел пустую Walkera и из того что было скрутил ее в комплект FPV. Была необходимость на охоте оперативно найти разливы воды, дичь, дорогу. Как же она меня задолбала!!! её непредсказуемость просто убивала. Научился на автомате вертеть компас при каждом включении, ждал по 20 мин пока не найдет спутники, прошил на самую последнюю версию- все бесполезно. Исключительно учитывая мой опыт управления моделями, я до сих пор пользую родную раму хоть и два раза клееную.
Он пытался:
- рвануть в небо
- улететь домой в китай
- переворачивался в полете
- и т д.
Но иногда, вел себя как очень послушный ребенок.
В конце концов, мне надоело гадать как сегодня поведет себя полетный контролер и наслушавшись отзывов заказал клон arducopter 2.6
Изучив его неделю, узнал все его возможности и решил скрестить Вальку с ним.
Имею богатейший опыт постройки моделей, пайки и сборки радиоэлектроники.
Но, то ли лыжи не едут …
Контроллер прекрасно выходит на связь. Отлично прошивается, настраивается, подключение родного компаса Вальки не вызвало проблем. Горизонт видит отлично. У всех, после прохождения визарда или ручных настроек он уже более менее летает. У меня- нет.
Проблемы следующие.
Не заканчивается процедура корректирования регуляторов. При убавлении стика газа не происходит длинного пика. В результате моторы не набирают полные обороты, модель даже не отрывается от земли.
В ручную каждый регуль настраивается нормально. Но модель тут же опрокидывается , не пытаясь взлететь. Никакой FPV пока даже не прикручиваю, пытаюсь наладить полет голой тушки. Геморрой
еще усложняется долгой разборкой сборкой аппарата. Что либо поменять надо раскручивать ее полностью. Телеметрию еще не получил, по этому вывел хвост юсб для миссион-планера из корпуса.
Может есть какие предположения? буду рад любому совету.
Может есть какие предположения? буду рад любому совету.
почитайте мой мануал.
попробуйте настроить все по пунктам не игнорируя мелочей
проверьте модель на предмет порядка подключения моторов и направления вращения
проверьте в режиме стабилизации как он стабилизируется в руке.
в случае трудностей с начальной настройкой пидов закрепите его на растяжке за два луча
мануал hobby.msdatabase.ru/project-updates/…/arducopter
Дык по Вашему мануалу и настраивал! первое с чем столкнулся - у Вас указана последовательность подключения моторов к контроллеру 1,4,2,3 , а в миссион планере проверка моторов идет A B C D. Ссылка на вики ардуино оттуда не работает , информация видимо устарела. У меня А , B, С ,D при проверке моторы включаются последовательно по часовой стрелке. В руке ведет себя не очень адекватно, хотя стиками управляется как бы в нужную сторону, но имеет бешеную тенденцию опрокинуться сразу же на бок. Всегда на правый.
пока до растяжки его далеко. С Пидами играл, но думаю пока, что то еще очень простое не досмотрел.
Еще, несколько раз, к примеру два раза из десяти, контроллер при подключении батареи может врубить один мотор.
а как это реализовано там?
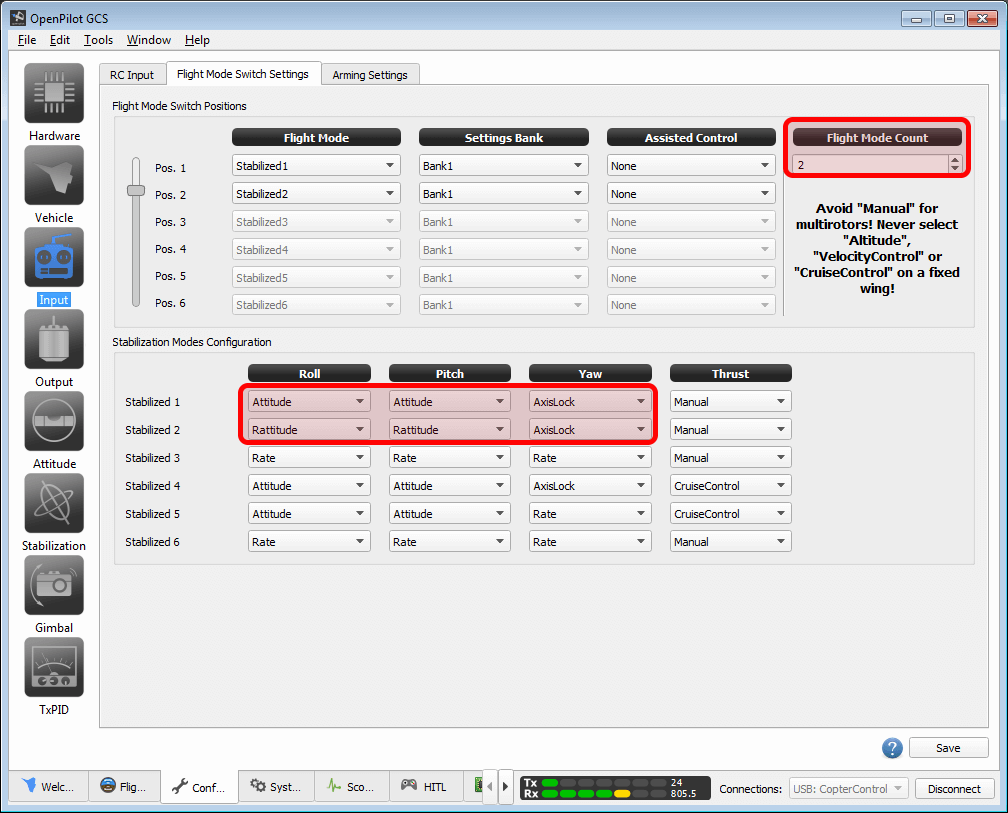
Есть 3 набора набора пидов и для каждого полётного режима можно выбрать свой набор.
Вот где Settings Bank: (обводил не я, просто картинка такая)
Еще, несколько раз, к примеру два раза из десяти, контроллер при подключении батареи может врубить один мотор
это жесть какаято.
залейте прошивку ардукоптер 3.1 под квадру
зайдите в терминал и сделайте сброс сетапа.
перекалибруйте все по новой
обратите внимание что радио калибровано в пределах 1000-2000
если не поможет - остается только деффект аппаратной части
недолжно быть несанкционированых включений моторов ни при каких раскладах
надеюсь валькеровский “7” серии приемник не используете? он полон сюрпризов
Вот где Settings Bank:
на вид это не пиды а персонализация функционала - типа конструктора полетного режима
видимо там где bank1 - можно выбрать набор пидов?
да, в нескольких банках ты хранишь настройки пидов. При переключении режимов можно менять и пиды. На арду я думаю к режимам смену пидов привязывать не к чему (разве что в акро летаете) а вот к разным акб можно было бы, но вообще как мне кажется проще летать на одних типах батарей.
Сообщение от alexeykozin
тротл мин поднимите. слишком малая тяга на минимальных оборотах, т.е. мертвая зона по тяге.
а на сколько поднять тротл что бы не накосячить? сейчас стоит 130.-до 200 не много будет
видимо там где bank1 - можно выбрать набор пидов?
Да. Вот сама настройка:

Может есть какие предположения? буду рад любому совету.
Почитайте ветку про Нову и ветку про Чирика (это СХ-20) - в них все “начинающие” и “конченные” бъются за светлую жизнь АРМ-клона, причём - вполне успешно решая описанные вами проблемы и задачи, вплоть до полёта по точкам (кто умудряется выжить от нетерпения на второй день покупки взлететь по-выше).
Собственно основная проблема - надо понять и принять, что АПМ настраивается ВМЕСТЕ с уже законченной конструктивно и развешанной рамкой со всеми грамотно расположенными прибамбасами на борту. Причём, настройка производится в строго определённой последовательности - иначе полная непредсказуемость результата (вернее - вполне предсказуемый шмяк …).
Торопиться не нАаада ! - некто т.Саахов.
Сообщение от alexeykozin
тротл мин поднимите. слишком малая тяга на минимальных оборотах, т.е. мертвая зона по тяге.
проверил изменение при повышения тротл мин на 200 .улучшения не заметил. сделал автотюн без ветра. p-0.06500- 0.162000. I-0.06-0.09200. стало гораздо хуже.
если сохранить предыдущее разрешение измерений акселерометра то загрубления не произойдет как мне кажется. Но конечно объем вычислений возрастет как минимум в 2 раза
если использовать медианный фильтр вместо накопительного округления то зашкаливающие за границу разрешения акселя сэмплы не будут оказывать влияния на результат. а если тупое интегрирование - то расширяй не расширяй шкалу результат будет с ошибкой. но медианный имхо не справится с таким битрейтом каков он у акселя на атмеге. в медианном фильтре есть достаточно медленная процедура сортировки данных
проверил изменение при повышения тротл мин на 200 .улучшения не заметил. сделал автотюн без ветра. p-0.06500- 0.162000. I-0.06-0.09200. стало гораздо хуже.
ок, начнем сначала.
соосны ли моторы, высталяли ли инструментально?
какие пропеллеры?