А давайте обсудим Arducopter - APM

Вставлю свои пять копеек про ардукоптер. Два года назад приобрел пустую Walkera и из того что было скрутил ее в комплект FPV. Была необходимость на охоте оперативно найти разливы воды, дичь, дорогу. Как же она меня задолбала!!! её непредсказуемость просто убивала. Научился на автомате вертеть компас при каждом включении, ждал по 20 мин пока не найдет спутники, прошил на самую последнюю версию- все бесполезно. Исключительно учитывая мой опыт управления моделями, я до сих пор пользую родную раму хоть и два раза клееную.
Он пытался:
- рвануть в небо
- улететь домой в китай
- переворачивался в полете
- и т д.
Но иногда, вел себя как очень послушный ребенок.
В конце концов, мне надоело гадать как сегодня поведет себя полетный контролер и наслушавшись отзывов заказал клон arducopter 2.6
Изучив его неделю, узнал все его возможности и решил скрестить Вальку с ним.
Имею богатейший опыт постройки моделей, пайки и сборки радиоэлектроники.
Но, то ли лыжи не едут …
Контроллер прекрасно выходит на связь. Отлично прошивается, настраивается, подключение родного компаса Вальки не вызвало проблем. Горизонт видит отлично. У всех, после прохождения визарда или ручных настроек он уже более менее летает. У меня- нет.
Проблемы следующие.
Не заканчивается процедура корректирования регуляторов. При убавлении стика газа не происходит длинного пика. В результате моторы не набирают полные обороты, модель даже не отрывается от земли.
В ручную каждый регуль настраивается нормально. Но модель тут же опрокидывается , не пытаясь взлететь. Никакой FPV пока даже не прикручиваю, пытаюсь наладить полет голой тушки. Геморрой
еще усложняется долгой разборкой сборкой аппарата. Что либо поменять надо раскручивать ее полностью. Телеметрию еще не получил, по этому вывел хвост юсб для миссион-планера из корпуса.
Может есть какие предположения? буду рад любому совету.
Может есть какие предположения? буду рад любому совету.
почитайте мой мануал.
попробуйте настроить все по пунктам не игнорируя мелочей
проверьте модель на предмет порядка подключения моторов и направления вращения
проверьте в режиме стабилизации как он стабилизируется в руке.
в случае трудностей с начальной настройкой пидов закрепите его на растяжке за два луча
мануал hobby.msdatabase.ru/project-updates/…/arducopter
Дык по Вашему мануалу и настраивал! первое с чем столкнулся - у Вас указана последовательность подключения моторов к контроллеру 1,4,2,3 , а в миссион планере проверка моторов идет A B C D. Ссылка на вики ардуино оттуда не работает , информация видимо устарела. У меня А , B, С ,D при проверке моторы включаются последовательно по часовой стрелке. В руке ведет себя не очень адекватно, хотя стиками управляется как бы в нужную сторону, но имеет бешеную тенденцию опрокинуться сразу же на бок. Всегда на правый.
пока до растяжки его далеко. С Пидами играл, но думаю пока, что то еще очень простое не досмотрел.
Еще, несколько раз, к примеру два раза из десяти, контроллер при подключении батареи может врубить один мотор.
а как это реализовано там?
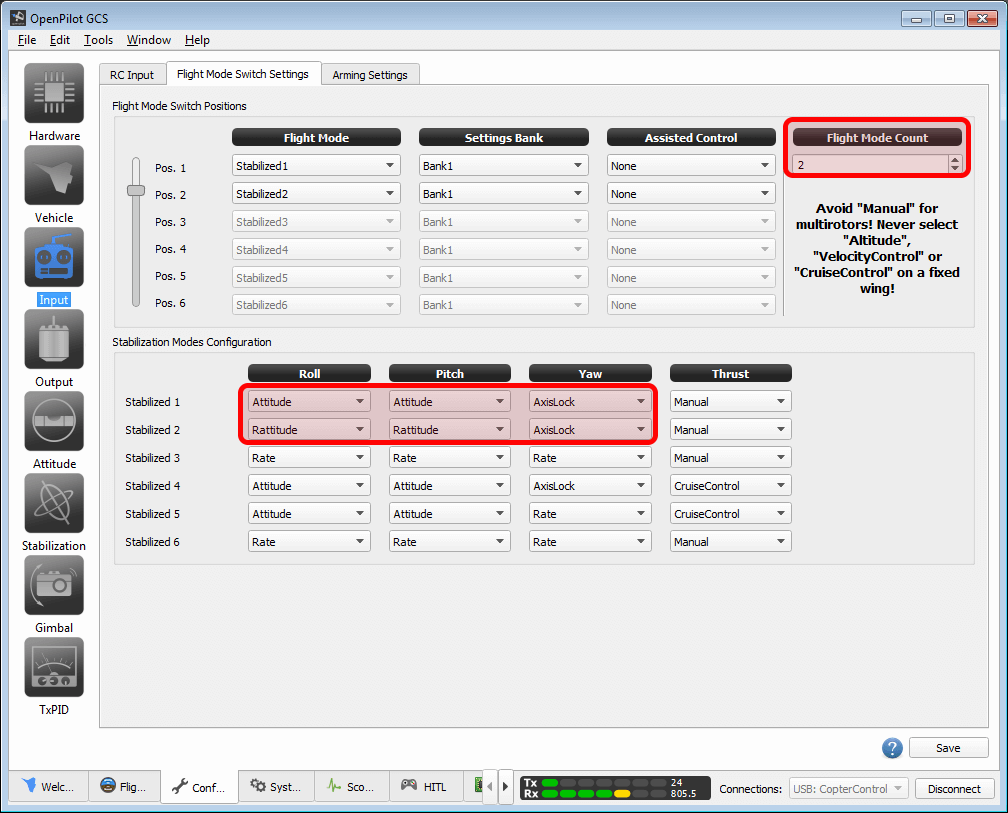
Есть 3 набора набора пидов и для каждого полётного режима можно выбрать свой набор.
Вот где Settings Bank: (обводил не я, просто картинка такая)
Еще, несколько раз, к примеру два раза из десяти, контроллер при подключении батареи может врубить один мотор
это жесть какаято.
залейте прошивку ардукоптер 3.1 под квадру
зайдите в терминал и сделайте сброс сетапа.
перекалибруйте все по новой
обратите внимание что радио калибровано в пределах 1000-2000
если не поможет - остается только деффект аппаратной части
недолжно быть несанкционированых включений моторов ни при каких раскладах
надеюсь валькеровский “7” серии приемник не используете? он полон сюрпризов
Вот где Settings Bank:
на вид это не пиды а персонализация функционала - типа конструктора полетного режима
видимо там где bank1 - можно выбрать набор пидов?
да, в нескольких банках ты хранишь настройки пидов. При переключении режимов можно менять и пиды. На арду я думаю к режимам смену пидов привязывать не к чему (разве что в акро летаете) а вот к разным акб можно было бы, но вообще как мне кажется проще летать на одних типах батарей.
Сообщение от alexeykozin
тротл мин поднимите. слишком малая тяга на минимальных оборотах, т.е. мертвая зона по тяге.
а на сколько поднять тротл что бы не накосячить? сейчас стоит 130.-до 200 не много будет
видимо там где bank1 - можно выбрать набор пидов?
Да. Вот сама настройка:

Может есть какие предположения? буду рад любому совету.
Почитайте ветку про Нову и ветку про Чирика (это СХ-20) - в них все “начинающие” и “конченные” бъются за светлую жизнь АРМ-клона, причём - вполне успешно решая описанные вами проблемы и задачи, вплоть до полёта по точкам (кто умудряется выжить от нетерпения на второй день покупки взлететь по-выше).
Собственно основная проблема - надо понять и принять, что АПМ настраивается ВМЕСТЕ с уже законченной конструктивно и развешанной рамкой со всеми грамотно расположенными прибамбасами на борту. Причём, настройка производится в строго определённой последовательности - иначе полная непредсказуемость результата (вернее - вполне предсказуемый шмяк …).
Торопиться не нАаада ! - некто т.Саахов.
Сообщение от alexeykozin
тротл мин поднимите. слишком малая тяга на минимальных оборотах, т.е. мертвая зона по тяге.
проверил изменение при повышения тротл мин на 200 .улучшения не заметил. сделал автотюн без ветра. p-0.06500- 0.162000. I-0.06-0.09200. стало гораздо хуже.
если сохранить предыдущее разрешение измерений акселерометра то загрубления не произойдет как мне кажется. Но конечно объем вычислений возрастет как минимум в 2 раза
если использовать медианный фильтр вместо накопительного округления то зашкаливающие за границу разрешения акселя сэмплы не будут оказывать влияния на результат. а если тупое интегрирование - то расширяй не расширяй шкалу результат будет с ошибкой. но медианный имхо не справится с таким битрейтом каков он у акселя на атмеге. в медианном фильтре есть достаточно медленная процедура сортировки данных
проверил изменение при повышения тротл мин на 200 .улучшения не заметил. сделал автотюн без ветра. p-0.06500- 0.162000. I-0.06-0.09200. стало гораздо хуже.
ок, начнем сначала.
соосны ли моторы, высталяли ли инструментально?
какие пропеллеры?
стало гораздо хуже
Стал вялым или дёрганым - как именно хуже? А центр тяжести у вас по центру?
ок, начнем сначала.
соосны ли моторы, высталяли ли инструментально?
какие пропеллеры?
на этой же раме 2месяца назад стоял контроллер jp2 летал идеально.висел нак прибитый. но почему то его заглючило и я поставил apm pro mini/ пропы карбон 10-45. сколько мог балансировал. моторы золотого цвета без названия 2212-1000kw/ вес без акума 920гр. акум 3s 3000mah 30c/ в режиме висения 15amper/(в планере)
Стал вялым или дёрганым - как именно хуже? А центр тяжести у вас по центру?
стал больше болтатся при быстром спуске (и газ в верх) дергатся не стал.центр тяжести я регулирую акумом.цепляю с низу.
А сравниваете с чем - какие до этого пиды были?
Я по опыту пяти разных рам и вмг заметил, что в стабилизации летает всегда почти нормально на 0.15, поэтому надо именно в лоитере ловить. Мало P - как на верёвке болтается и очень плохо рулится, много - как на шару соскальзывает.
Ставьте Р на крутилку и ловите оптимальный момент. Автотюн на прямоугольных всегда косячит.
У меня рпсколбас на спуске был на miniapm. Причем поймать уже было нереально, краш 100%.
Проблемму решил утяжелением контроллера + виброразвязка (до этого просто на 3м скотче сидел).
А сравниваете с чем - какие до этого пиды были?
Я по опыту пяти разных рам и вмг заметил, что в стабилизации летает всегда почти нормально на 0.15, поэтому надо именно в лоитере ловить. Мало P - как на верёвке болтается и очень плохо рулится, много - как на шару соскальзывает.
Ставьте Р на крутилку и ловите оптимальный момент. Автотюн на прямоугольных всегда косячит.
на крутилку пока что не знаю как .у меня flyski-i6 а пиды я вручную проверил от 0.06 до 0.25 по 10%.
Щас у меня на пиксе и м8н с банггуда офсеты по двум компасам
-49 -5 -58
113 -554 -140
Нашел у знакомого старый советский размагничиватель “Прибой УР-03”, несколько раз прошелся им по обеим платам (пикса и жпс с компасом) - офсеты уменьшились по некоторым осям, но не стали околонулевыми, как у Алексея Козина, а некоторые увеличились. Текущие значения
-98 -22 14
53 -234 -11
Аналогично себя ведет и внешний компас, который брал для AIOPv2, и встроенный в нем же.
Что Я Делаю Не Так?
53 -234 -11
Но ведь явно есть 180 и что то просится перевернуться.
Други, полетный режим optic flow loiter с какой версии появился? Что то я в своей 3.2.1 под АПМ не нахожу режима, несмотря на то, что настройки пидов для режима есть!
полетный режим optic flow loiter с какой версии появился?
У меня сейчас подключен AIOP с 3.1.5r2 - в списке режимов есть OF_Loiter. Может от MP зависит? Он у меня последний.
Но ведь явно есть 180 и что то просится перевернуться.
А было 550+… это сколько раз надо было переворачиваться? =)) Обе платы, сам пикс и жпс с банггуда, установлены в соответствии с маркировкой на оных, в МП при калибровке закрашиваются по одинаковым осям. Я тоже думал перевернуть, но если так сделать (к примеру ROTATE_ROLL_180), то оси при калибровке закрашиваются противоположные. Сам модуль жпс перевернуть не пробовал - он явно сконструирован антенной вверх и коннектором назад, так что переворачивать его или неудобно, или бессмысленно.
у Вас указана последовательность подключения моторов к контроллеру 1,4,2,3 , а в миссион планере проверка моторов идет A B C D. Ссылка на вики ардуино оттуда не работает , информация видимо устарела. У меня А , B, С ,D при проверке моторы включаются последовательно по часовой стрелке
…
но имеет бешеную тенденцию опрокинуться сразу же на бок
Простите, влезу в разговор… Сам по глупости недавно перепутал моторы - они подключаются немного странно, я бы сказал 3,1,2,4. Т.е как-то по-арабски - справа-налево.
1 - Правый Верхний, 2 - Левый Нижний, 3 - Левый Верхний, 4 - Правый Нижний. Ну и направление вращения, конечно проверить нужно
Все, я сдаюсь. Я вообще в прострации с этим контроллером. Уже процентов на 99 уверен что китайцы подсунули брак.
залил прошивку ардукоптер 3.1 под квадру
сделал сброс сетапа.
перекалибровал все по новой.
Моторы настроились отлично. горизонт видит отлично. все отлично!
но есть маленькое НО!
Арминг моторов происходит на секунду и вырубается. Можно пробовать сколько хочешь. Секунда- и вырубается. Все напруги отличные. Запитал от родной платы вальки там 5,2 вольта. Подавал и со стороны регулей (впаивал перемычку) и со стороны передатчика. Напруга не проседает. Шарил по всей плате. И вдруг, обнаружил, что с подключенным по USB компьютером, все заводится замечательно. Опять стал думать что проседает напруга. Взял провод микро юсб, подал 5 вольт - нифига! только когда подключен к компу, замечательно стартует и дизармится. Ну что же за хрень то!
Не выдержал, подрубил батарею 4S, но все то же самое. Арминг, секунда прокрутки моторов и стоп как будто я дизармлю.