правильные ESC

А чем правильные ESC отличаются от неправильных в плане схемотехники?
не видел схем правильных\неправильных регулей, но учитывая экономность китайцев, могу предположить, что
полевыми транзисторами идет управление напрямую от контроллера
правильно же управлять полевыми транзисторами с помощью микросхем драйверов(даже полевиками с логическими уровнями), а не напрямую от контроллера, такими образом открытие транзисторов происходит быстрее, уменьшается нагрев (соответственно потребление).
это повлияет повлияет на скорость установки требуемого напряжения с помощью PWM.
Далее Атмега 8 (контроллер регуля) имеет на борту 3 таймера , только один из них 16 бит и 2канала, соответственно могу предположить, что PWM реализован софтовый или 8bit аппаратный(максимальное значение 256). Если прибавить к этому, что большинство регулей идут без кварца и частота контроллера плавает, соответственно плавают все значения.
И в таких условиях контроллер должен отследить с помощью АЦП (вообще отдельная тема) и принять решение повысить\понизить напр.
Это все равно что писать(каждый поймет по своему 😃) во время шторма.
Следовательно, думаю, китайцы просто ставят очень грубые условия на регулировку выходных значений.
А еще обычные регули синус не умеют выдавать, только пилу
Кстати недавно вычитал, что большинство популярных недороших регулей не имеет осциллятора и при прогреве уже до 40 градусов таймеры могут плавать ±10%. На мой взгляд это не очень критично для выхода на моторы, т.к. мозги поправят любой медленнный дрейф благодрая I-составляющей в PID-регуле, но есть один неприятный момент с минимальным порогом PWM на входе . Например в MultiWii выставляется MINTHROTTLE, чтобы движки не остановились при любых маневрах. Если на земле он стабилно крутится при 1120, то после прогреве, после того как “уплывут” таймеры, 1120 может оказать ниже порога старта. (возможно, именно это я наблюдал когда останавливались двигатели после маневра в акро). Теперь я ставлю MINTHROTTLE с запасом.
А еще обычные регули синус не умеют выдавать, только пилу
чистый PWM - это меандр, чем круче границы тем меньше нагрева и потерь, а синус не нужен
затем по идее выход PWM нужно фильтровать LC фильтром, в регулях ничего этого нет
недороших регулей не имеет осциллятора
где то здесь на форуме видел таблицу, точно не помню, но кварцы устанавливаются на регулях от 50А
обычные регули синус не умеют выдавать
Если регуляторы будут выдавать синус, то к ним будут нужны радиаторы неподъемного веса, потому что чем меньше время переключения, тем меньше нагрев ключа.
первоисточники все же читать надо
Goedendag,
These controllers don’t use block-commutation but sinus-currrent-control.
Higher motor efficiency, lower torque ripple, lower noise, no current spikes
between controller and battery:
http://www.sinusleistungssteller.deVriendelijke groeten 😉 Ron van Sommeren
И соответственно радиаторы на 60В-200А

Вот аналог из “обычных”

первоисточники все же читать надо
понятно мы и вы имели ввиду разные сигналы,
мы с Евгением имели ввиду сигнал PWM (подача сигнала на ключи),
а вы имели ввиду способ изменения напряжения на выходах ключей во время включения фазы мотора,
да собственно говоря, то что дешевые регули не умеют синус выдавать- это просто китайцы на уровне прошивки не стали заморачиваться, к устройству железа не имеет отношения
первоисточники все же читать надо
если можно, то вкратце, в чем суть у немецких разработчиков (скорее всего там просто нарастание и затем спад) ?
в идеале график нарастания должен быть управляемым U = F(снимаемое напряжение с фаз регулирования)
Антон, можно ссылочку на спец. регули от кастл?
Любой регуль из линейки Phoenix имеет эту специальную коптерскую прошивку. Про остальные линейки не в курсе.
Например www3.towerhobbies.com/cgi-bin/wti0001p?&I=L5GVS006…
Любой регуль из линейки Phoenix имеет эту специальную коптерскую прошивку.
и не хилый ценник от 50$ за регуль
коллеги! а если кварц дает такую стабильность - процы известны…
что мешает впаять кварц и выставить фьюзы ?
или может от кварцев не так много и зависит ?
А кто может сказать, есть ли кварц в этом регуле?
static.rcgroups.net/…/a809310-4-Ultimate 014.jpg
…rcgroups.net/…/a4679160-112-Phoenix 25 amp - fron…
что мешает впаять кварц и выставить фьюзы ?
В оочень многих регуляторах стоят кварцы. В том числе и 10баксовых
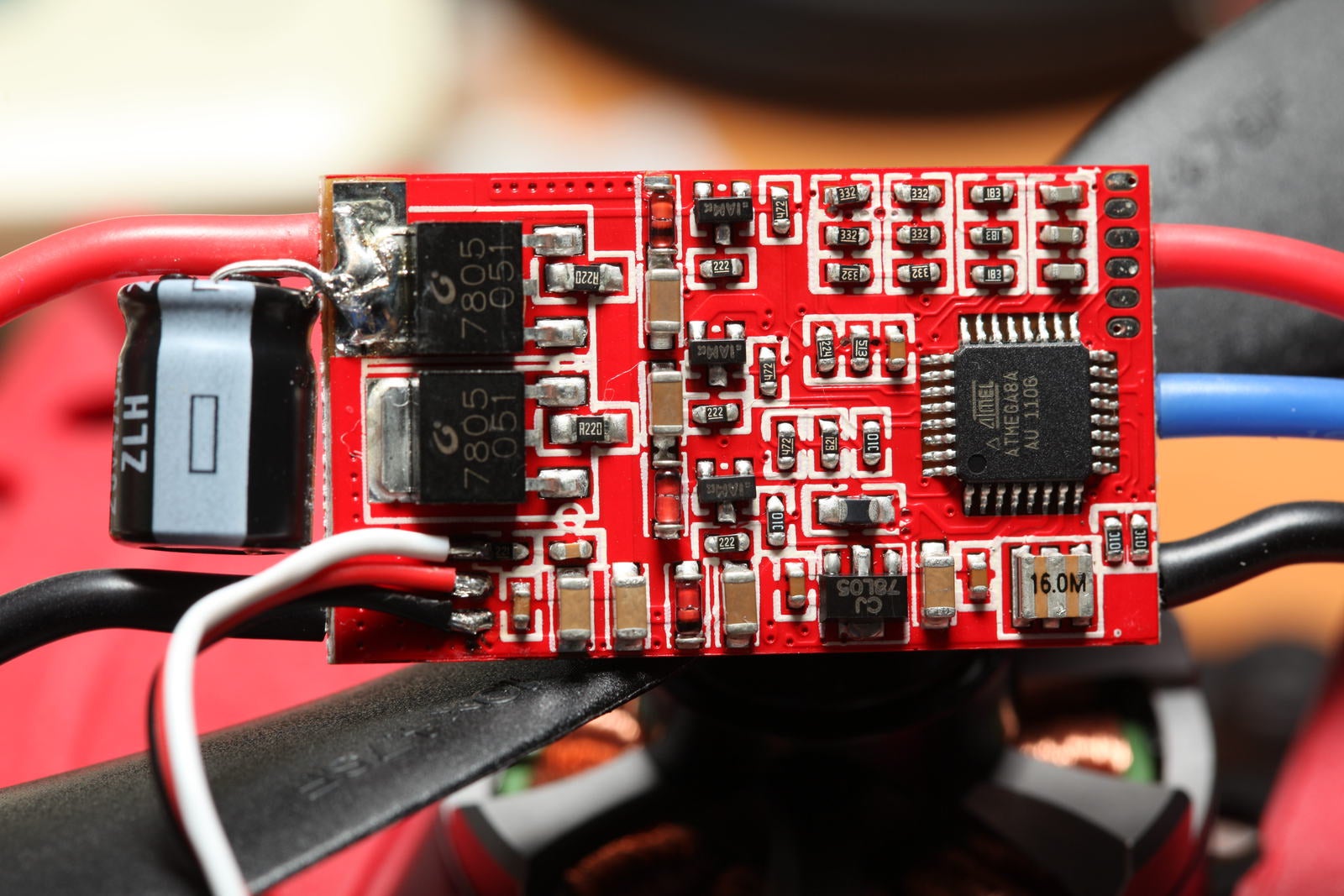

есть ли кварц в этом регуле?
А он разве не на silabs?
but sinus-currrent-control
Именно. Мотор является индуктивной нагрузкой, поэтому ток не нарастает мгновенно как напряжение, он является своего рода фильтром низкой частоты. Поэтому для реализации синусоидального тока через обмотку необходимо программным образом корректировать ШИМ пакеты контроллера. Такой нехитрый метод используют, например, в усилителях класса D, получая большую выходную мощность при относительно малых габаритах. Правда, приходиться жертвовать коэффициентом нелинейных искажений, что для силовых приводов некритично. Если Вы обратите внимание на свою ссылку, то увидите токовые резисторы на выходе контроллера именно для контроля формы выходного тока.
Мотор является индуктивной нагрузкой,
А с каких это пор реактивные нагрузки научились преобразовывать электрическую энергию в механическую, и вообщё участвовать в преобразовании энергии? Только активная нагрузка, в реальной жизни комплексная, в нашем случае с индуктивной составляющей. Индуктивность двигателя, также как и индуктивность обмотки трансформатора вещь вредная, но принципиально неизбежная и легко преодолимая. В классической электротехнике всё это давно решаемо.
то увидите токовые резисторы на выходе контроллера
чтобы было всем понятно
шунты для измерения падения напряжения на них - соответственно измерения тока
только где эти резисторы ? это не конденсаторы ли для фильтрации- сглаживания ШИМ ?
А зачем дополнительно фильтровать? Ведь у нас и так есть ФНЧ с тау L/R, вот и сработали индуктивность и сопротивление обмотки.
А с каких это пор реактивные нагрузки научились преобразовывать электрическую энергию в механическую, и вообщё участвовать в преобразовании энергии?
Со времен Ампера. Магнитные рамки-прообраз электромотора. До него электричеством или нагревали, или светили. Да! Еще лягушек мучили. Только взаимодействие магнитных полей производит механическую работу. Можно, конечно, двигать параллельные провода, да и то у них есть индуктивность. Я не говорю об электростатическом взаимодействии- промышленного применения достичь трудновато. В классической электротехнике все это давно известно.
только где эти резисторы
Возле выходных проводов. Регуляторы высокого класса питают двигатель током, по форме близким к синусоиде, избегая таким образом паразитных потерь от высших гармоник. Уменьшается нагрев двигателя, повышается КПД, и т.д.
Со времен Ампера. Магнитные рамки-прообраз электромотора. До него электричеством или нагревали, или светили. Да! Еще лягушек мучили. Только взаимодействие магнитных полей производит механическую работу. Можно, конечно, двигать параллельные провода, да и то у них есть индуктивность. Я не говорю об электростатическом взаимодействии- промышленного применения достичь трудновато. В классической электротехнике все это давно известно.
Сэр, без обид, настоятельно рекомендую хотя бы посмотреть принципы работы трёхфазного двигателя переменного тока и его эквивалентную схему при номинальной мощности на валу. Так вот, индуктивная составляющая мощности идёт только на намагничивание статора в режиме холостого хода, что в общей мощности нагруженного двигателя составляет единицы процентов.
Регуляторы высокого класса питают двигатель током, по форме близким к синусоиде, избегая таким образом паразитных потерь от высших гармоник. Уменьшается нагрев двигателя, повышается КПД, и т.д.
Сглаживать ШИМ в синусоиду можно фильтром низких частот на выходе регулятора, но сама индуктивная составляющая нагрузки достаточно хорошо фильтрует пульсации. А управлять синусоидой с помощью ключей - получить большой нагрев на сопротивлении “недооткрытого” канала - низкий КПД.
Шим не сглаживается в синусоиду. Принцип формирования синусоиды другой - как в усилителях класса D. Контроллер знает текущую частоту управляющего напряжения, соответствующего заданным оборотам и формирует косинусоидальный сигнал на ключи, это примерно та же ШИМ, но среднее значение изменяется по косинусоиде. Естественно частота квантования выбирается таким образом, что хотя бы на порядок превосходит частоту коммутирующих импульсов на максимальных оборотах. Интегрирование происходит на самом двигателе, то есть на его индуктивной составляющей входного сопротивления. Немного сумбурно, но без иллюстраций.
Питание током абсолютно не оправдано, так как для двигателя нет никакой критической зависимости от тока, наоборот есть всем нам известное Kv.
В общем подведем итог,
ШИМ в идеале меандр (если не меандр - то потери на нагрев, и чем выше частота ШИМ -тем больше потери), создавая разную скважность ШИМ (время полного открытия ключа) на выходе ключа получаем сглаженное напряжения определенной величины.
таким образом, во времени, меняя скважность также получаем сигнал U(t) определенной формы,
частота изменения скважности (не частота ШИМ- она на порядок должна быть больше) в усилителях ит.д.можно назвать частотой дискретизации
Например, при инициализации регуль пищит мотором в разной тональности, вообще можно даже и простую музыку сыграть.
таким образом синусоидальный сигнал или квадратный или пила на “сглаженном” выходе ключей - всё это задается на уровне прошивки (что пилу, что синусоиду одинаково просто сделать)
И ещё вопрос , тем кто схемотехнику регулей знает, есть ли регули в которых применяются драйвера ключей (mosfet-ов) ?
потому что без драйверов - ключи будут медленно открываться (в момент открытия ключи имеют большее сопротивление) и куча энергии будет тратится на нагрев