правильные ESC

подскажите, что это за деталька выпала на картинке? Подозреваю что конденсатор, но какой номинал?
Вероятней всего конденсатор.Если по цвету и размерам(очень не точный метод определения,но в большинстве случаев попадает в точку) как тот на который указывет стрелка,то номинал 0.1мКф, корпус 0603.
А почему никто не пытается сделать правильные ESC? Про сделать мозги для коптеров так тем больше десятка, а про правильные регули - ни одной. Все ограничиваются перешивкой. Я это к чему? Мне с другого проекта могут перепасть вот такие регули open-bldc.org/wiki/Open-BLDC . Я их еще не видел, но говорят, что железо спаяно, но без софта. Железо я и сам спаять могу, но в программировании, мягко скажем, не силен. В проекте, вроде, даже софт есть, но как я понял, его надо править под себя. Как - я не знаю. Есть ли смысл заморачиваться? Сможет ли кто из уважаемых форумчан помочь мне, хотя бы советом?
А чем правильные ESC отличаются от неправильных в плане схемотехники?
Зачем опенпилоты делают “правильные” ESC на stm32, тоже не понятно…
Например esc от кастл криэйшнс выполнены по стандартной схемотехнике, отличаются только специальным коптерным фермваре. Причем по заявленным характеристикам у них дискретность 2048, что соответствует микрокоптеровским bl ctrl 2.0. Ну и остальные коптерные плюшки присутствуют. После крайнего обновления фермваре народ стал их хвалить. Я пока в раздумьях - и хочется и колется (цена 1800р за штуку)
Антон, можно ссылочку на спец. регули от кастл?
А чем правильные ESC отличаются от неправильных в плане схемотехники?
не видел схем правильных\неправильных регулей, но учитывая экономность китайцев, могу предположить, что
полевыми транзисторами идет управление напрямую от контроллера
правильно же управлять полевыми транзисторами с помощью микросхем драйверов(даже полевиками с логическими уровнями), а не напрямую от контроллера, такими образом открытие транзисторов происходит быстрее, уменьшается нагрев (соответственно потребление).
это повлияет повлияет на скорость установки требуемого напряжения с помощью PWM.
Далее Атмега 8 (контроллер регуля) имеет на борту 3 таймера , только один из них 16 бит и 2канала, соответственно могу предположить, что PWM реализован софтовый или 8bit аппаратный(максимальное значение 256). Если прибавить к этому, что большинство регулей идут без кварца и частота контроллера плавает, соответственно плавают все значения.
И в таких условиях контроллер должен отследить с помощью АЦП (вообще отдельная тема) и принять решение повысить\понизить напр.
Это все равно что писать(каждый поймет по своему 😃) во время шторма.
Следовательно, думаю, китайцы просто ставят очень грубые условия на регулировку выходных значений.
А еще обычные регули синус не умеют выдавать, только пилу
Кстати недавно вычитал, что большинство популярных недороших регулей не имеет осциллятора и при прогреве уже до 40 градусов таймеры могут плавать ±10%. На мой взгляд это не очень критично для выхода на моторы, т.к. мозги поправят любой медленнный дрейф благодрая I-составляющей в PID-регуле, но есть один неприятный момент с минимальным порогом PWM на входе . Например в MultiWii выставляется MINTHROTTLE, чтобы движки не остановились при любых маневрах. Если на земле он стабилно крутится при 1120, то после прогреве, после того как “уплывут” таймеры, 1120 может оказать ниже порога старта. (возможно, именно это я наблюдал когда останавливались двигатели после маневра в акро). Теперь я ставлю MINTHROTTLE с запасом.
А еще обычные регули синус не умеют выдавать, только пилу
чистый PWM - это меандр, чем круче границы тем меньше нагрева и потерь, а синус не нужен
затем по идее выход PWM нужно фильтровать LC фильтром, в регулях ничего этого нет
недороших регулей не имеет осциллятора
где то здесь на форуме видел таблицу, точно не помню, но кварцы устанавливаются на регулях от 50А
обычные регули синус не умеют выдавать
Если регуляторы будут выдавать синус, то к ним будут нужны радиаторы неподъемного веса, потому что чем меньше время переключения, тем меньше нагрев ключа.
первоисточники все же читать надо
Goedendag,
These controllers don’t use block-commutation but sinus-currrent-control.
Higher motor efficiency, lower torque ripple, lower noise, no current spikes
between controller and battery:
http://www.sinusleistungssteller.deVriendelijke groeten 😉 Ron van Sommeren
И соответственно радиаторы на 60В-200А

Вот аналог из “обычных”

первоисточники все же читать надо
понятно мы и вы имели ввиду разные сигналы,
мы с Евгением имели ввиду сигнал PWM (подача сигнала на ключи),
а вы имели ввиду способ изменения напряжения на выходах ключей во время включения фазы мотора,
да собственно говоря, то что дешевые регули не умеют синус выдавать- это просто китайцы на уровне прошивки не стали заморачиваться, к устройству железа не имеет отношения
первоисточники все же читать надо
если можно, то вкратце, в чем суть у немецких разработчиков (скорее всего там просто нарастание и затем спад) ?
в идеале график нарастания должен быть управляемым U = F(снимаемое напряжение с фаз регулирования)
Антон, можно ссылочку на спец. регули от кастл?
Любой регуль из линейки Phoenix имеет эту специальную коптерскую прошивку. Про остальные линейки не в курсе.
Например www3.towerhobbies.com/cgi-bin/wti0001p?&I=L5GVS006…
Любой регуль из линейки Phoenix имеет эту специальную коптерскую прошивку.
и не хилый ценник от 50$ за регуль
коллеги! а если кварц дает такую стабильность - процы известны…
что мешает впаять кварц и выставить фьюзы ?
или может от кварцев не так много и зависит ?
А кто может сказать, есть ли кварц в этом регуле?
static.rcgroups.net/…/a809310-4-Ultimate 014.jpg
…rcgroups.net/…/a4679160-112-Phoenix 25 amp - fron…
что мешает впаять кварц и выставить фьюзы ?
В оочень многих регуляторах стоят кварцы. В том числе и 10баксовых
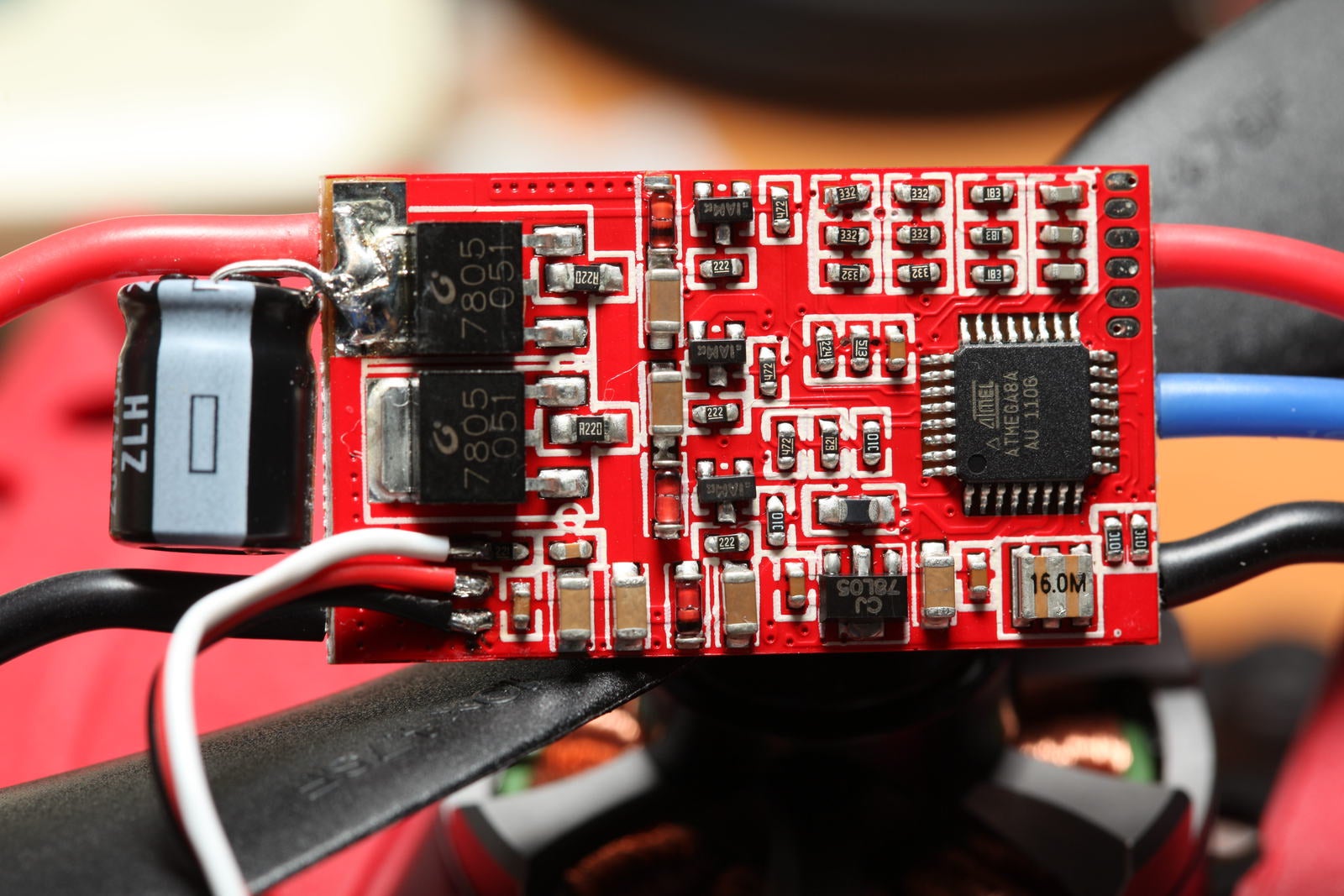

есть ли кварц в этом регуле?
А он разве не на silabs?
but sinus-currrent-control
Именно. Мотор является индуктивной нагрузкой, поэтому ток не нарастает мгновенно как напряжение, он является своего рода фильтром низкой частоты. Поэтому для реализации синусоидального тока через обмотку необходимо программным образом корректировать ШИМ пакеты контроллера. Такой нехитрый метод используют, например, в усилителях класса D, получая большую выходную мощность при относительно малых габаритах. Правда, приходиться жертвовать коэффициентом нелинейных искажений, что для силовых приводов некритично. Если Вы обратите внимание на свою ссылку, то увидите токовые резисторы на выходе контроллера именно для контроля формы выходного тока.
Мотор является индуктивной нагрузкой,
А с каких это пор реактивные нагрузки научились преобразовывать электрическую энергию в механическую, и вообщё участвовать в преобразовании энергии? Только активная нагрузка, в реальной жизни комплексная, в нашем случае с индуктивной составляющей. Индуктивность двигателя, также как и индуктивность обмотки трансформатора вещь вредная, но принципиально неизбежная и легко преодолимая. В классической электротехнике всё это давно решаемо.
то увидите токовые резисторы на выходе контроллера
чтобы было всем понятно
шунты для измерения падения напряжения на них - соответственно измерения тока
только где эти резисторы ? это не конденсаторы ли для фильтрации- сглаживания ШИМ ?
А зачем дополнительно фильтровать? Ведь у нас и так есть ФНЧ с тау L/R, вот и сработали индуктивность и сопротивление обмотки.