Wookong wk-m полетный контроллер от DJI

DJI-Wookong М + DJI 450 RTF там что дополнительно регуляторы рама моторы и пропы
DJI ESC-30A Brushless OPTO - отличные регуляторы.
ИМХО, не советую брать родные моторы+пропеллеры. Родные моторы неплохие, но требуют специальных пропеллеров - посадочное отверстие там не круглое. А поскольку пропеллеры - расходный материал будете завязаны лишь на них. (У меня улетела Наза с родными моторами/пропеллерами. Вроде и жалко, а по сути - с плеч долой эту комбинацию 😃 )
Моторы рекомендовал бы Пульсо, Тайгеры… Пропеллеры - APS SF.
А чтобы определиться точнее - изучите хорошо вот эту ссылку.
Адепты Вуконга! Расскажите кто пользовался настройками что в скриншоте в пункте 2 (пункт два).
Что за параметры “I”, “V.Damping”, “Disturbed GAIN” ? На что влияют? Какие впечатления? В инструкции сказано что для продвинутых пилотов и все…
В инструкции сказано что для продвинутых пилотов и все…
в этом соль вуконга - похоже киты сами точно не знают, иначе не объяснить того что нигде не существует конкретного определения на что эти крутилки влияют 😃 так же впрочем как и загадочные белые сигналы, периодически появляющиеся на стоящем на земле пепелаце…
Дим, ты думаешь, они сами в шоке от того что Вуконг моргает так как они не расчитывали 😉
в пункте 2 (пункт два).
Скажите что вы думаете про эти регуляторы Hobbywing 18А FLYFUN ESC они вроде работаю на частоте 800
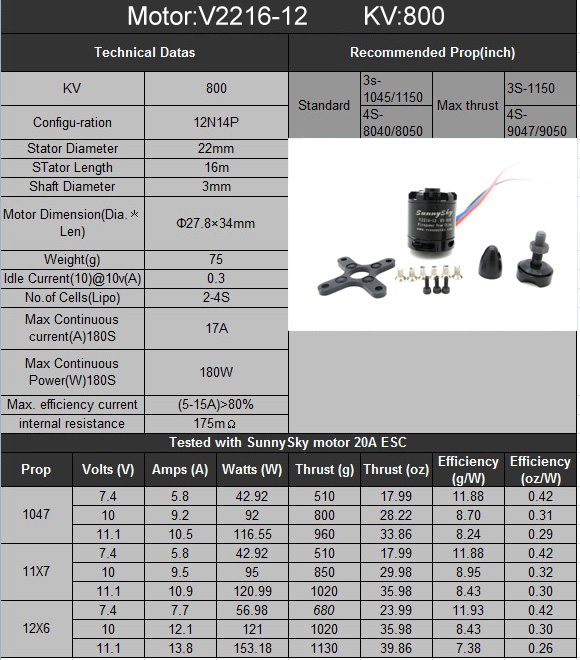
И что вы думаете про эти моторы
Вопрос пятый. Про калибровку компаса. Вывел сегодня первый раз “прогуляться” своего “ОСЬМИНОГА”. Попробовал калибровать компас и напоролся на засаду. 7 попыток сделал - безрезультатно. Когда тумблером щелкаешь, в режим калибровки входит, все нормально, загорается синий огонек. Начинаю крутить в горизонтальной плоскости, тоже все хорошо, синий переключается на постоянно горящий зеленый. А вот дальше - засада!!! Как только переворачиваю в вертикальную плоскость аппарат и делаю один оборот, сразу выскакивает красный сигнал ошибки калибровки. И так 7 попыток подряд.крутил так, как в инструкции на картинке. Может есть какой то нюанс? который не учел? Как его калибровать надо??? А то голова уже кружится от всего этого действа. А без калибровки поднимать в воздух, тем более первый раз не хочется. И еще, аппарат тяжелый, 3,5 кг ( с батареями) установил скорость моторов в поле настроек на одно деление выше среднего, не маловато?
загадочные белые сигналы
Эти сигналы согласно описанию должны появляться после завершения режима калибровки компаса. Я вот этих белых сигналов дождаться не могу, а у Вас они сами моргают. Забавно 😃
Эти сигналы согласно описанию должны появляться после завершения режима калибровки компаса. Я вот этих белых сигналов дождаться не могу, а у Вас они сами моргают. Забавно 😃
Просто после калибровки светодиодный индикатор горит белым чуть более секунды, если все прошло правильно и успешно
кто знает, когда выйдет новая прошивка 5.08 ?
кто знает, когда выйдет новая прошивка 5.08 ?
А чем 5.06 не устраивает?
у меня сейчас только view, а в обновлении view становится singe weipoint
у меня сейчас только view, а в обновлении view становится singe weipoint
Обещают в течении двух трех недель запуститить обновление.
Конечно вещь хорошая. Но как показал опыт эксплуотации наземной станции при полетах по точкам, то для прокладки маршрута полноценного и сложного вполне достаточно и 20 точек. Ну если они решили 50 дать, то только хорошо. Это очень много.
Ну а для мониторинга кликгоу - это намного удобнее чем полет по маршруту. Единственное, снимки местности что доступны в “Планете -земля” иногда некудышние. Вот векторные карты бы подкладывать…
Если возникнут вопросы по заложению и планированию маршрутов, то помощь и объяснения как и что, что бы не наломать дров,здесь будут
Не хочет летать… Начинаю менять всю электронику по кругу.
Создалось впечатление что взлет в режиме “M”, не взирая на цвет светодиода.
Если еще присмотреться…то наступает момент возврастающих незатухающих колебаний.
Какие ESC у вас стоят? Правильно ли установлен MUI и правильно ли введена его ориентаци с координатами.(особенно внимательно знаки смещений)
Но честно могу сказать, такого еще не было нигде. Только у нас два аппарата улетело и вот теперь еще один кувыркается. Больше нигде такого не было. Что то не правильно установили или ошибочно выбрали в настройках. Другого просто не может быть
Создалось впечатление что взлет в режиме “M”
😃 …и чайник-пилот. Похоже, конечно, но не смущают двойные помигивания контрольной лампы?
При подключении аккума в ассистэнте стало отображать завышенное напряжение для батареи 4S - 17-18V. Попробовал 3 разные батареи. С чем может быть связано?
При подключении аккума в ассистэнте стало отображать завышенное напряжение для батареи 4S - 17-18V. Попробовал 3 разные батареи. С чем может быть связано?
нужно провести калибровку по контрольному вольтметру и забить эти значения вместо тех что есть.
Показывает неправильно, потому вы случайно сами сбили эти показания влазия для любопытства в режим калибровки батареии.Теперь только повторная и реальная калибровка
Только у нас два аппарата улетело и вот теперь еще один кувыркается.
У кого-то видео в гараже было, кувыркался. Стало быть, теперь четыре?
Какие ESC у вас стоят? Правильно ли установлен MUI и правильно ли введена его ориентаци с координатами.(особенно внимательно знаки смещений)
Но честно могу сказать, такого еще не было нигде. Только у нас два аппарата улетело и вот теперь еще один кувыркается. Больше нигде такого не было. Что то не правильно установили или ошибочно выбрали в настройках. Другого просто не может быть

Падает тот что слева, тот что справа - летает. В прошлые выходные левый аппарат был на раме ХА Value, в эти пересобрал его на XA DIY. Поменял сначала движки, потом ESC. ESC - родные, DJI-евские. Результат подлетов сейчас грузится на Ютюб.
Ну что, проверю сервисные возможности одного небезызвестного магазина, где купил этот мозг 😃
Падает тот что слева, тот что справа - летает.
Хороший парк. Посему и удивительно что Х4 кувыркается. Но давайте попробуем понять почему это происходит при условии что все собрано правильно.
Только одно объяснение. Энертность моторов с пропом 13х6.5(во всяком случае шаг большой в варианте Х4 и )намного больше размер. Посему начал бы с опускания пида к минимуму для Х4. Если в цифрах (процентах) , то как минимум в 2 раза относительно значений для Х6.Может даже 3 раза. Моторы у обоих аппаратов одинаковые. Вот только как себя чувствуют моторы на Х4. Им тяжелее и обороты при одном и том же положения газа намного меньше чем на Х6
Именно большое значение ПИД при всех остальных исправных деталях и настройках может вгонять аппарат в резонансные незатухающие колебания приводящие в конечном итоге к перевороту.
Чем медленнне отклик системы ESC-мотор-пропеллер, тем меньше ПИД. Чем шустрее система, тем выше значение ПИД
Пропы у меня 12х6. Моторки на аппаратах разные. На шестерке Пульсо 920 (АРС 10х4.7), на четверке - Тигры 800 (АРС 12х6).
Но дело, все таки, в выходе DJI на 4 мотор. История такова, что после падений (раскачек!!!) на прошлой неделе поменял не только раму, но и моторы, а потом ESC. Подозрение было на 4 мотор. Колебания на обоих рамах возникали вокруг оси 1-3 мотор. Как на одной так и на второй рамах. Как Вы понимаете, после полной пересборки все движки и регули поменялись местами. После первого падения, вчера были по кругу заменены все движки из запасного комплекта, а затем и ESC на 4 моторе. В конце концов 4 мотор стал жить своей жизнью. Видео всего здесь, квад практически не слушается пульта:
А это пруфлинк за летающую шестерку,место где, собственно, квад и бился в конвульсиях 😃 :
