Интелектуальный , умный и независимый подвес камеры? Реально!

poneslas’ +2
В третьем видео количество шагов посчитать можно. Тряска очень сильная.
В третьем видео количество шагов посчитать можно. Тряска очень сильная.
это не шаги а cogging, t.e. некий эффект залипания …
Перед всеми снимаю шляпу . изучил тему , очень заинтересовался . вроде даже более менее разобрался , но остались вопросы . Был бы крайне признателен, если бы потратили чуть-чуть времени,и популярно объяснили.
-
Моторы,
Насколько я понял перематывать надо любой мотор, нет на сегодняшний день удовлетворяющего готового . собственно вопрос как перематывать, и каковы критерии . откуда взялись 10 Ом.подойдут ли многополюсники , и глядя на схемы перемотки толком не понял разницу (= может не туда смотрел. -
Контроллеры моторов . логика понятна - 3 синуса смещённых по фазе, а вот как это воплотить в жизнь ,причём чтобы можно было использовать общедоступный мозг неясно мне … И вообще , возможно ли это в стиле хоум мейд (=
Заранее спасибо .
это не шаги а cogging, t.e. некий эффект залипания …
угу, значит не хватает силы тока для моторки…
В третьем видео количество шагов посчитать можно. Тряска очень сильная.
=кол-во полюсов/2, а каждый такой шаг = 360градусов синусоиды
Моторы,
Насколько я понял перематывать надо любой мотор, нет на сегодняшний день удовлетворяющего готового . собственно вопрос как перематывать, и каковы критерии . откуда взялись 10 Ом.подойдут ли многополюсники , и глядя на схемы перемотки толком не понял разницу (= может не туда смотрел.Контроллеры моторов . логика понятна - 3 синуса смещённых по фазе, а вот как это воплотить в жизнь ,причём чтобы можно было использовать общедоступный мозг неясно мне … И вообще , возможно ли это в стиле хоум мейд (=
- перематывать оч хорошо по penolet.ru/content/110?page=2 проводом 0.15-0.2мм диаметром, чем больше полюсов тем лучше - больше сопротивление и меньше шаг.
- можно спокойно сделать и дома, главно уметь разводить и изготавливать платы, паять а также уметь программировать…
можно спокойно сделать и дома, главно уметь разводить и изготавливать платы, паять а также уметь программировать
Ну а для тех кто с C/C++ не дружит ,прошики гденьть выложены ?
Это все лирика про уметь паять:)
что куда разводить то? 😁
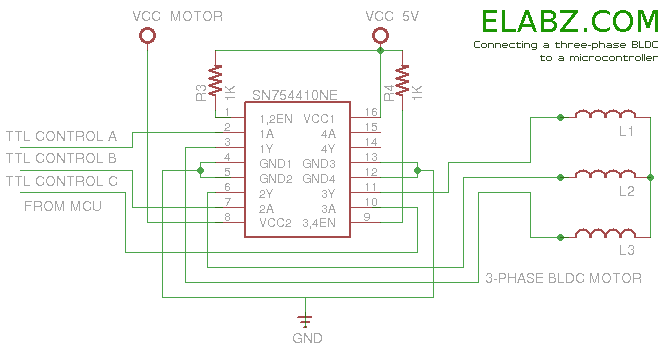
это пример контроллера для трехфазного двигателя, который управляется ардуиной:
это пример скетча, который дает 3 фазы на ШИМ выходах ардуины и , подобно библиотечному примеру servo sweep крутит мотор вперед, а потом назад.
const int ROLLmotorPin1 =9; //мотор подключен к выходам 9 10 11
const int ROLLmotorPin2 =10;
const int ROLLmotorPin3 =11;
boolean direct = true; //направление движения
int pwmSin[] = {127,110,94,78,64,50,37,26,17,10,4,1,0,1,4,10,17,26,37,50,64,78,94,110,127,144,160,176,191,204,217,228,237,244,250,253,254,253,250,244,237,228,217,204,191,176,160,144,127};
int increment;
int RollPos = 1;
int ROLLcurrentStepA=0; //первая фаза мотора крена
int ROLLcurrentStepB=16; //вторая фаза
int ROLLcurrentStepC=32; //третья фаза
void setup() {
pinMode(ROLLmotorPin1, OUTPUT);
pinMode(ROLLmotorPin2, OUTPUT);
pinMode(ROLLmotorPin3, OUTPUT);
}
void loop() {
for(RollPos = 0; RollPos < 47; RollPos += 1) //крутить 47 шагов вперед
{
increment = 1;
move ();
delay(50);
}
for(RollPos = 47; RollPos>=1; RollPos-=1) //крутить 47 шагов назад
{
increment = -1;
move ();
delay(50);
}
}
void move()//блок вращения двигателей
{
ROLLcurrentStepA = ROLLcurrentStepA + increment;
if(ROLLcurrentStepA > 47) ROLLcurrentStepA = 0;
if(ROLLcurrentStepA<0) ROLLcurrentStepA =47;
ROLLcurrentStepB = ROLLcurrentStepB + increment;
if(ROLLcurrentStepB > 47) ROLLcurrentStepB = 0;
if(ROLLcurrentStepB<0) ROLLcurrentStepB =47;
ROLLcurrentStepC = ROLLcurrentStepC + increment;
if(ROLLcurrentStepC > 47) ROLLcurrentStepC = 0;
if(ROLLcurrentStepC<0) ROLLcurrentStepC =47;
analogWrite(ROLLmotorPin1, pwmSin[ROLLcurrentStepA]);
analogWrite(ROLLmotorPin2, pwmSin[ROLLcurrentStepB]);
analogWrite(ROLLmotorPin3, pwmSin[ROLLcurrentStepC]);
}
Вот у меня к примеру есть лишняя плата сенсоров AllInone я так понимаю можно ее юзать в качестве датчика.С нее всего лишь нужен аксель.Соеденить с ардуинкой по i2с шине ,а к ардуинке уже вышеупомянутый драйвер. Но вот еслиб кто пршивкой поделился бы😇
Расклад по вышеописанному скетчу.
Я им крутил мотор от жесткого диска, с родными обмотками. Крутится рывками. Рывки происходят видимо при проскакивании зуба между магнитами. Как лечить не знаю. Ставил синусоиду на 256 шагов длинной, не помогло. Возможно, проблемы не будет с перемотанным мотором, проверить смогу не ранее 6-го января (когда приедет провод для перемотки).
По программированию. Я сам кодить не умею и образование у меня музыкально-теоритицкое 😃 Однако, можно находить нужные куски готового кода и библиотеки для работы с датчиками. Так после нескольких дней гугленья я нарыл библиотеку ПИД-регулятора, библиотеку для акселя и гироскопа, а так же крутилку мотора, которую вы уже видели. Если у меня получится собрать что-то рабочее, я выложу это здесь. Но ждать успеха не стоит. Пробуйте кодить-конструировать самостоятельно. Самостабилизирующийся по двум осям девайс задача вполне решаемая, ее решали много студентов до нас применительно к своим задачам. Куски их творчества можно найти в сети.
Вот у меня к примеру есть лишняя плата сенсоров AllInone я так понимаю можно ее юзать в качестве датчика.С нее всего лишь нужен аксель.
Нужны по крайней мере аксели И гироскопы. Точнее, гироскопы и аксели, в порядке важности.
Самостабилизирующийся по двум осям девайс задача вполне решаемая, ее решали много студентов до нас применительно к своим задачам. Куски их творчества можно найти в сети.
Из кусков чужого кода построить что-то путное нереально, сужу по себе (если не считать библиотеки). Нужно ПОНИМАТЬ, что в коде происходит. И к тому же стабилизация по двум осям не настолько тривиальная задача, как может показаться на первый взгляд, там есть много подводных камней. Парадоксально, но трехосевая стабилизация в мат. отношении проще.
супер , уже информация к размышлению…
а готовых драйверов таких нет ?. ну или можно ли , скажем, просто на выходы арду повесить ключи ?
з.ы. касательно мозга , понятно , что не принципиально толком какой брать , лишь бы набор датчиков был , но , например хочу я в качестве инерциального блока использовать MPU . какой контроллер к нему надо ? .в ардуинах этих глаза разбежались …
если я говорю бред , не злитесь , ну не силён я в этом (+ но желание разобраться чешется
а готовых драйверов таких нет ?
www.ebay.com/itm/…/200697775568
5 шт = 5 баксов.
Два на две оси и еще три про запас. Собрать схему по рисунку элементарно, зачем покупать готовые драивера?
Я им крутил мотор от жесткого диска, с родными обмотками. Крутится рывками. Рывки происходят видимо при проскакивании зуба между магнитами. Как лечить не знаю.
Это практически не возможно вылечить. 😒 Дело в том что эти моторы не расчитаны на синусоиду. Синусоидные моторы мотаются примерно так:
“Concentric belts.”
Ну или так:
“The skew in the armature slots”
Чего только на рынке нет. Вполне возможно, что такие моторы суперплавно будут работать. Но все они рассчитаны на ВРАЩЕНИЕ и имеюют соответсвенно низкоомные обмотки. А для наших целей нужны обмотки как у шаговиков, на УДЕРЖАНИЕ. Поэтому прхиодится мириться с эффектом залипания и бороться с ним глубокой ОС
бороться с ним глубокой ОС
ОС - шо цэ тэ кэ?
Алексей , тогда поинтересуюсь у родоначальника ветки . та конфигурация , которую предложили мне вообще имеет право на жизнь !?
ОС - шо цэ тэ кэ?
Чего только на рынке нет. Вполне возможно, что такие моторы суперплавно будут работать. Но все они рассчитаны на ВРАЩЕНИЕ и имеюют соответсвенно низкоомные обмотки. А для наших целей нужны обмотки как у шаговиков, на УДЕРЖАНИЕ. Поэтому прхиодится мириться с эффектом залипания и бороться с ним глубокой ОС
Ага я тоже все борюсь и программно и железом), одно могу сказать моторы с большим зазором крутятся почти без рывков 😉

Даже очень!!! Как оно то зажурчало и пошло…
Алексей, круто! вот это я понимаю возможности у людей, и скорость изготовления впечатляет.
Супер!!!
От а я забыл что у меня 3д принтер есть - щас я тоже напечатаю себе подвес ))