Rabbit Flight Controller

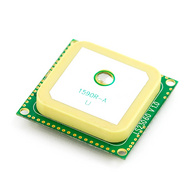
GPS модуль G.top MTK 3329 тынц! Модуль интересен тем, что допускает как по питанию, так и по логическим уровням TTL 5В, но нужно подавать бэкап питание, до 4,2В, то есть тут уж без диодов не обойтись, или лепить батарейку. Изначально шёл с 9600 и 1 Гц, прошил по рекомендациям с рцгрупс какой то прошивкой, стал по умолчанию 38400 1Гц. Пока не ясно, переводит ли его кролик в 5Гц или нет, судя по удержанию в пределах метров 15 - скорее всего нет. Спутников при этом было не менее 8-9!!!
Формат данных NMEA, обычный текстовый вывод. Полагаю, с Ублоксом не более чем маркетинг!
судя по удержанию в пределах метров 15 - скорее всего нет
суда по прошивке так он работать и должен, скажите разрабам спасибо что не 50м
А вот про ублокс не понял… что тот 40 баксов, что второй, какая разница? Оба 10 герц, оба навороченные, в чем мтк интереснее? Формат тоже одинаковый, Логический ттл 3,3-5в оба, ах да, на ублоксе не нужно батарейку городить- уже есть, этим он наверное точно хуже?
Спутников при этом было не менее 8-9!!!
Если сравнивать с оригинальным кроликовым то он лучше ловит спутники или так же?
Если сравнивать с оригинальным кроликовым то он лучше ловит спутники или так же?
также. сколько спутников есть на небе столько и поймает, больше 9 не увидишь никогда. Ублокс видит до 13 спутников, но их столько никогда нет.
Ток понять не могу что создателям кролика мешало сделать на 10 герц нормальный приемники… оно же лучше всего…
По калибровке, постараюсь рассказать, все проще, чем вы думаете.
- Включили режим калибровки, не тормозим, время идет, берем коптер перед собой горзонтально, светодиоды светят вперед, ну вот так за два луча и берем, не стесняемся!
- Крутим как юлу в плоскости пола, будто по Yaw крутится, два оборота, светодиоды опять вперед светят, закончили упражние.
- Опять держим как вначале, но теперь даем крен и будто крутим на месте бочку, два оборота, светодиоды все время смотрят от вас, вперед! Закончили упражнение, вернулись в исходное положение, будто на земле стоит, только в руках.
- Теперь кувыркаем вперед его, плавно все делая, будто на веревке висит сушится, за центральную часть подвешенный, а вы его прокручиваете, светодиоды описывают траекторию колеса, которое катится вперед, ну, хотите обруча.
То есть, принципиальная разница от инструкции в том, что по ней мы коптер ставим разнымии осями вертикально, и все время крутим вокруг вертикальной оси, то есть прокручивая каждую ось датчика в поле Земли. А нужно, получается, прокручивать каждую ось датчика в его родной плоскости!!! Разница принципиальная. Эффект 100%! попробуйте и вы! (с)
Ток понять не могу что создателям кролика мешало сделать на 10 герц нормальный приемники… оно же лучше всего…
они и есть 10 герц все. Только кролику это не нужно. Прошивка мультивии- пока там ничего нового не придумают, до тех пор и кролик будет неадекват с гпс.
П.С. Да, забыл написать, в полете курс держит ок! КэриФри не пробовал, мне ГПСных фишек пока что хватило 😉
И, мелочь, но важно. Плата контроллера между пластинами, но никакой металлизации, и силовая плата, на видео видно, под аккумулятором, она сверху от контроллера, отлично видна на 2:44. Ничего компасу измерять снизу поле Земли не мешает!!! Не пускайте силовую разводку между Кролем и Землей!
Кратко - собрал трикоптера на карбоновой раме, 30а rctimer желтых регулях, и новых 2830 750 фиолетовых моторах, прошивка 210-я сонар и баро - это СКАЗКА, висит как прибитый по высоте, сонар и баро отлично работают, 5в cо всех кроме одного (ну и серву конечно не трогал провод) отрезал
провода без ферритов, питание короткий, к мотору длинные ( не укорачивал) доп подсветку пока не ставилВывод, регули действительно не шумящие с линейным бэком, рекомендую
Чуть позже выложу видео сетапа и полета
аккуратно получилось. можно поворотный узел крупнее и подробнее?
Напомните пожалуйста какой ГПС использовали на видео
Хотел сказать для тех, кто планирует к кролику нефирменный модуль - отличный вариант Locosys LS20031.
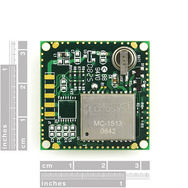
Очень хорошая чуйка, он, конечно, не 5 грамм, как мой GPS, а раза в 3-4 тяжелее, но есть светодиод, мигающий при 3D fix, и бэкап батарейка. Минус - питание 3,3В, и нужно что-то мутить по согласованию уровней TTL, как-то ставят сопротивления, я в электронике не силён, поэтому и выбрал заведомо 5В модуль, который еше и по TX/RX допускает пороги 5В (только не забываем понижать напругу для бэкап, или питание батарейкой согласно даташиту)
нужно что-то мутить по согласованию уровней TTL, как-то ставят сопротивления, я в электронике не силён, поэтому и выбрал заведомо 5В модуль, который еше и по TX/RX допускает пороги 5В
Вашь модуль не 5В ТТЛ а 3.3В. У вас питание с 5В понижается на 3В для процессора обычным линейником. Любой ТТЛ кабель на 3.3в прочитает линию 5В и 5В прочитает 3.3в. Не забивайте этим голову. 3.3-5в ттл не читает только обычный ком-порт. Любой кабель от старой нокии, самсунга, любого другого СТАРОГО телефона на СОМ или УСБ имеет порог ТТЛ 3.3в, но он прочитает и 5в, если попадется. Все современные ГПС заточены под 3.3в, если модуль хочет 5В, то он так и так понизит напругу до 3- 3.6в для питания процессора.
При выборе гпс модуля внимание стоит уделять не его описанию какой он крутой (все они нафаршированы дальше некуда), а разводке питания процессора- есть ли защита от переплюсовки, батарейка(это не столь важно как то каким раком питание сделано). У оригинального кроликовского модуля питание сделано хуже некуда, при переплюсовке улетает куча всего, может пробить до процессора, хотя поставить 1 толстый диод ничего не стоит…
Вашь модуль не 5В ТТЛ а 3.3В.
Я не писал, что мой 5В TTL, я писал что допускает 5В, ибо в описании была фраза TTL 3.3V (5V tolerant) это меня и привлекло, не умею и не люблю вешать всякие деталюшки, хотя блин на backup пришлось диоды городить, без backup мой GPS тупо не заводился, долго мучался, что делаю не так, пока вдумчиво не прочитал в даташите и на rcgroups, что питание backup обязательно для этих модулей!!! Я просто пишу, что я делал, что бы в итоге вчера кролик с превой попытки подключения GPS этот GPS нашел, и благополучно с этим GPS полетал. Локосис 20031, на самом деле, особо обвязывать и не нужно, у кролика TTL 3.3В, вчера замерил. Только питание понизить, КРЕНкой там, или 2-3 диода, кому что нравится.
Сергей Вертолетов, а можно скриншот ваших настроек в GUI.
А если колика на самолет прицепить… Как будет работать ГПС удержание позиции? 😃)) Ну это ладно, а вот с возвратом домой как будут дела обстоять…
без backup мой GPS тупо не заводился, долго мучался, что делаю не так, пока вдумчиво не прочитал в даташите
Без бекап заводится :Р Надо закоротить Vbackup на землю 😃 Но тогда всегда будет холодный старт, батарейка намного лучше без вариантов 😃
Игорь, могу рассказать на словах. Левая часть, где ползунки - никакой самодеятельности, просто выбрана сверху справа в списке выбора рама 330-450мм. Ползунки при этом сами встают как надо, ничего не менял.
Справа галочки:
…5 канал …6 канал
Функция …Lo Mid Hi …Lo Mid Hi
AutoStability… v …v …v
HeightLock …v… v
HeadLock …v
PositionHold…v
Go…v
5 канал - 3 поз. тумблер. 6 канал - крутилка, изначально ставлю ее по центру, и кручу до упора то влево то вправо, контроль положения по писку бипера коптера, если рядом, или по монитору каналов на апапарутре, когда коптер был далеко.
канал - 3 поз. тумблер. 6 канал - крутилка, изначально ставлю ее по центру, и кручу до упора то влево то вправо,
когда управляешь 6 каналом (удержание позиции по гпс или возврат домой) 5 канал в каком положении выбираешь - просто со стабилизацией или с удержанием высоты и компасом??
Чел KKUSA с рцгрупп пишет утилиту для конфигурирования кролика, выложил демо версию, удобно все в одном и на экран помещается
У меня дикая идея появилась- будет много букафф!
Я кажется вьехал в траблы с ГПС! Гпс использует компас, без норм рабочего компаса гпс работать не будет. Идею я получил с РСгрупс, там разрабы на англокитайском пытались это обьяснить, но толком ничего не понятно, зато, кажется, я доехал сам проведя аналогию с мобилой.
Берём смартфон с компасом, почти у всех он есть. Его надо калибровать перед использованием т.к. он сбивается. Калибруется как и кролик (2й, верный способ) с любым приложением использующим компас. Откалибровали- работает точно. Проходит день, мы шатались с телефоном везде и всюду, открываем компас- он опять сбит, опять нужно калибровать. Так вот, с кроликом точно такая беда!!! Не достаточно 1 калибровки дома! Пока туда- сюда с кролем шатаешься компас сбивается как и у мобилы! Компас надо калибровать сразу по приезду на место полетов как и каждый раз мобилу перед использованием! Думаю что если с поля никуда не уходили, то при смене батареи калибровать не надо, хотя ХЗ! Калибровка компаса никуда не записывается ни на кролике ни на мобильнике. Я провел тест со своим дибильником- откалибровал компас и покрутил магнитики возле него- компас сбился и хорошо, так, сбился. Откалибровал- порядок. Я более чем уверен что с кролем также лажа. Между полетами (смена батареи), если машины/магнитов рядом не было, то скорее всего калибровать не надо. Но если тягали вертушку домой, через багажник- перед полетами обязательно калибровать. Скорее всего все видео с адекватным гпс поведением сделаны после калибровки- приехал чел на поле, попробовать гпс и давай калибровать всё и вся- включил гпс, работает! Записал видео, доволен. А мы смотрим и не понимаем что за хрень, почему у нас не пашет. Вполне возможно что после калибровки не стоит вертушку ставить ни на капот машины, ни ближе 5м к ней чтоб компас не сбился. Вот так. Если я прав, то сегодня вечером гпс у меня заработает как надо. И, мне кажется, оба способа калибровки верны. Тест с дибильником это подтвердил. Обоими способами дибильник во всех положениях кажет верный север… Оригинальный способ проще для выполнения…
Чел KKUSA с рцгрупп пишет утилиту для конфигурирования кролика, выложил демо версию, удобно все в одном и на экран помещается
офигенная прога!!! Спасибо!
Насчет компаса тоже попробую калибровать на месте перед полетом
Я кажется вьехал в траблы с ГПС! Гпс использует компас, без норм рабочего компаса гпс работать не будет. Идею я получил с РСгрупс, там разрабы на англокитайском пытались это обьяснить, но толком ничего не понятно, зато, кажется, я доехал сам проведя аналогию с мобилой.
Я писал тут про то, что для работы GPS необходимо отлично настроенный режим CAREFREE. Этот режим напроямую зависит от правильно откалиброванного компаса. Если в режиме CareFree квадриком не можете управлять, то отключаем и заново калибруем компас до тех пор, пока нормально не сможете им управлять (вперед, назад, влево, вправо).
удобно все в одном и на экран помещается
а было всё не в одном?
красиво конечно, но удобно ли, когда разбито на столько закладок?