SteadiСopter

TOPTUN Алексей, давно хотел спросить. Почему изначально было принято решение идти по пути для наклона камеры наклонять всю ось стедикама?
Почему нельзя сделать как во взрослых системах, где ось всегда старается быть вертикальной, а наклон камеры регулирует подвес.
Видимо вы это уже обмозговавыли. Какие там подводные камни, в двух словах?
TOPTUN Алексей, давно хотел спросить. Почему изначально было принято решение идти по пути для наклона камеры наклонять всю ось стедикама?
Почему нельзя сделать как во взрослых системах, где ось всегда старается быть вертикальной, а наклон камеры регулирует подвес.
Видимо вы это уже обмозговавыли. Какие там подводные камни, в двух словах?
Я планировал выпуск подобной модели после Easy, но теперь занят более концептуальными изменениями и новые модели задерживаются. Я удивлен, что подобного до сих пор не сделали другие. Китайцы делают только подобие того, что уже поступило в продажу, а более существенного развития пока не видно. Еще есть ограничение со штатными гироскопами - при длинном коромысле не хватает коэффициента обратной реакции.
Если я правильно понял, коэффициент обратной реакции, это то, что у гироскопов слабая чувствительность и они просто не отреагируют на малые изменения в положении коромысла?
Простите за мой французский, просто те гироскопы которые я когда-то держал в руках жужали и вращались внутри со скоростью 20 000 об/м. Модельных гироскопов в руках не держал.
Так что мешает сделать для более точного контроля положения коромысла механический усилитель. К примеру обычный рычаг (для двух осей - 2 рычага), параллельный коромыслу, коромыслом и толкаемый, с плечами 1:10 т.е. от места толкания-соприкосновения коромысла и рычага, по коромыслу расстояние до центральной точки вращения в 10 раз длинее, чем расстояние то центральной точки у рычага. (Наверное проще нарисовать 😃) При изменении положения на 1 градус коромысла, рычаг имеет отклонение в 10гр. (Посмотрите на колёса старых паровозов, там часто подобное применялось)
Если систему стедикама стабилизировать так, как на больших стедиках, т.е. низ тяжелее верха настолько, насколько сама система возвращается из горизонтального положения в вертикально за 1,5-2 сек. то при возмущениях со стороны коптера, не передвигаясь, и по крену и по тангажу, стедикам будет выравнивать практически самостоятельно.
И лишь в момент ускорения и торможения коптера по горизонтальной плоскости, нижняя часть стедикама будет отклоняться по инерции, как более тяжёлая. Собственно в этот момент и нужно это отклонение компенсировать.
По моему это проще чем наклонять и придерживать коромысло всегда.
Где я не прав?
Если я правильно понял, коэффициент обратной реакции, это то, что у гироскопов слабая чувствительность и они просто не отреагируют на малые изменения в положении коромысла?
Простите за мой французский, просто те гироскопы которые я когда-то держал в руках жужали и вращались внутри со скоростью 20 000 об/м. Модельных гироскопов в руках не держал.
Так что мешает сделать для более точного контроля положения коромысла механический усилитель. К примеру обычный рычаг (для двух осей - 2 рычага), параллельный коромыслу, коромыслом и толкаемый, с плечами 1:10 т.е. при изменеиии положения на 1 градус коромысла, на длинном плече рычага имеем отклонение в 10гр. (Посмотрите на колёса старых паровозов, там часто подобное применялось)
Если систему стедикама стабилизировать так, как на больших стедиках, т.е. низ тяжелее верха настолько, насколько сама система возвращается из горизонтального положения в вертикально за 1,5-2 сек. то при возмущениях со стороны коптера, не передвигаясь, и по крену и по тангажу, стедикам будет выравнивать практически самостоятельно.
И лишь в момент ускорения и торможения коптера по горизонтальной плоскости, нижняя часть стедикама будет отклоняться по инерции, как более тяжёлая. Собственно в этот момент и нужно это отклонение компенсировать.
По моему это проще чем наклонять и придерживать коромысло всегда.Где я не прав?
Практические работы отнимают много времени. Времени не хватает. Китайцы анонсируют новый продукт (аналог существующего), когда еще и не опробовали прототип. У меня лежит пара работающих прототипов, но анонсировать коммерческую версию еще рано.
По гирам - у пилотажных вертолетов возможно на порядок более быстрое вращение, нежели у коромысла. Потому нужен гироскоп для более медленного прибора, так будет точнее, чем механическая компенсация.
Мультикоптер маневрирует активнее, чем вариант на троссе, потому и возможность активной коррекции необходима в большей степени. Дисбалансы сказываются сильнее по той же причине.
Для развития нужны эксперименты и люди, которые тратят время на прототипы с более существенным образом измененными конструкциями. Пока все копии - теже две оси, такие же нагрузки, тоже плече, такая же компановка элементов. Пропало желание демонстрировать альтернативные решения раньше времени.
Привет ецилопоманам. Подскажите, что может быть, клинит моторы T-MOTOR 3506-25, но не всегда, а иногда, бывает чаще третий иногда второй (согласно схеме наза), пока не подтолкнешь рукой, дальше работает как положено. Проявляется не каждый раз. Регуляторы Maytech 35A с прошивкой simon k. И naza. И второй вопрос не могу разобраться как настроить на назе, передатчике и приемнике, режим file-safe?
Господа подскажите, кто какие движки и регули использует на ецилопе и какие наиболее удачны.
Поменял двигатель изменений нет, поменял регулятор на 3 луче вроде бы стартуют все одновременно. Единственное мне кажется, что этот мотор вращается с меньшей скоростью по сравнению с другими двигателями. Это видно даже по инерции остановки после стопа моторов, он останавливается первым, а остальные позже на 0.5 секунды примерно все три одновременно. Не имея платы программирования я откаллибровал все двигатели путем подъема газа на 100%, потом на 0. Делал каждый двигатель поочередно на канале газа приемника. Кто- то сталкивался с такой ситуацией, может это какие-то настройки назы или на что это хотя бы похоже? Помогите пожалуйста разобраться.
Поменял двигатель изменений нет, поменял регулятор на 3 луче вроде бы стартуют все одновременно. Единственное мне кажется, что этот мотор вращается с меньшей скоростью по сравнению с другими двигателями. Это видно даже по инерции остановки после стопа моторов, он останавливается первым, а остальные позже на 0.5 секунды примерно все три одновременно. Не имея платы программирования я откаллибровал все двигатели путем подъема газа на 100%, потом на 0. Делал каждый двигатель поочередно на канале газа приемника. Кто- то сталкивался с такой ситуацией, может это какие-то настройки назы или на что это хотя бы похоже? Помогите пожалуйста разобраться.
Двигатель и регулятор не греются? Может быть замкнутый виток или наоборот оборваный проводок в двигателе. Точнее предположить сложно. Программировать контроллеры обычно можно и без карты.
Подскажите пожалуйста как программировать регуляторы maytech 35a без карты программирования и какие значения стоит подрепетировать для исправления ситуации?
разобрал Эцилопа, поменял 401 гиры, собрал - стало лучше, но все равно склоняюсь к тому что для ИДЕАЛЬНОЙ настройки нужно арендовать спортзал взять ноут и убить пару часов на запись тестовых полетов при разных настройках с небольшим шагом, а потом сравнить видео и выбрать лучшее
Подскажите пожалуйста как программировать регуляторы maytech 35a без карты программирования и какие значения стоит подрепетировать для исправления ситуации?
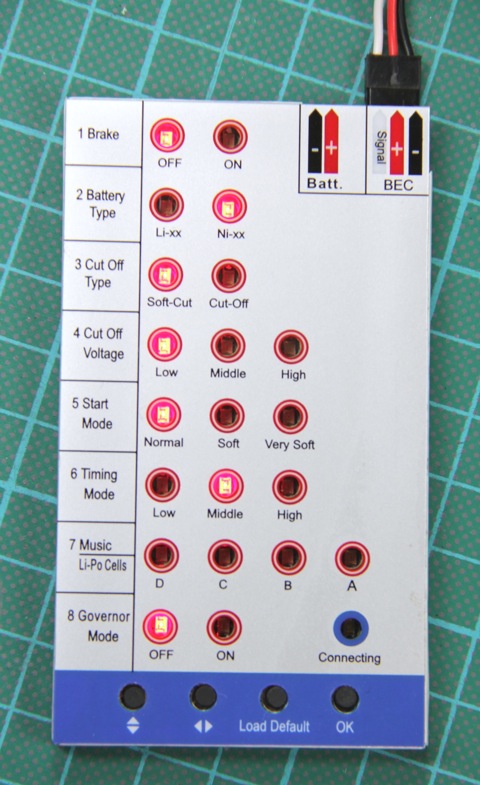
вопрос не по теме но отвечу. без карты смотри интсрукцию и считай бипы, что нужно поставить видно из фото. Кстати у тебя они с прошивкой SimonK поэтому тебе ничего менять не надо. Но SimonK может привести к срыву синхры на моторах блинчиках а у тебя именно такие. Я какое то время летал (без активного маневрирования) вообще без перепрошивки и программирования, потом от греха перепрошился на wiiESC и удалил BEMF конденсаторы
А что за гиры поставил?. У меня от вертолетной юности завалялись 611, но они конечно тяжеловатые заразы, хотя для эксперименУ хочу поставить .
разобрал Эцилопа, поменял 401 гиры, собрал - стало лучше, но все равно склоняюсь к тому что для ИДЕАЛЬНОЙ настройки нужно арендовать спортзал взять ноут и убить пару часов на запись тестовых полетов при разных настройках с небольшим шагом, а потом сравнить видео и выбрать лучшее
Все настройки подвеса осуществляются не взлетая. Единственное, что добавляет реальный полет - возможные вибрации от двигателей. Легкими толчками пальца можно раскачивать подвес и подобрать раекцию гироскопа (если речь идет о гироскопах). Наклоняя раму настраивается реакция NAZA.
А что за гиры поставил?. У меня от вертолетной юности завалялись 611, но они конечно тяжеловатые заразы, хотя для эксперименУ хочу поставить .
те же HK 401b - дешево и сердито но надо брать с запасом они часто дурят. делал мод - заливал термоклеем, новые 401 уже идут с виброраспоркой внутри
у меня завалялась футаба с маховиком она весит как кирпичь и жужжит ацки
прошло всего два месяца и я стал счастливым обладателем ЭЦИЛОПа. “спасибо” нашей почте 😦(( Хорошо хоть, что за это время посылка не повреждена
А еще спасибо, но уже настоящее Алексею и Юле, за то, что всегда поддерживали связь и даже выслали второго, но он тоже где-то затерялся на просторах нашей страны 😦 Жаль, что улетаю на неделю, собрать уже сейчас охота 😃
Господа а как насчет заморочиться по поводу чехла для переноски ecilop. Пошить удобный, легкий, компактный. В дно вшить фанерку и по всем сторонам вшить туристический коврик с карманами под акумуляторы, струмент. Если кого заинтересовала идея пишите кто что придумает, может у кого есть на заметке ателье, которые это делают. Давайте сконструируем и закажем пошив. Может у кого-то есть более интересные предложения?
Всем доброго дня, или вечера. На выходных удалось немного полетать в первый раз. Подвес пока не подключал, но на земле работает вроде нормально, хотелось сначала облетать сам квадрик. Вес снаряженного аппарата вышел с камерой 2400 г.( двигатели МТ3506(650кV), АРС 12Х3,8, NAZA, ОРТО 30А dji, 4s 5000 25c).
Gain вывел на крутилки на пульте, вроде бы настроил, но все равно должного отклика от квадрика получить не могу. При повороте вокруг своей оси квадрик теряет высоту, приходиться постоянно подправлять высоту газом, причем на удержание газа не 50%, а где то 60-70 % да еще и с запозданием, среднее время полета выходит 7-8 минут.
Такое впечатление, что мощности на этих пропеллерах или двигателях не хватает. На сайте Т-Motor по данному двигателю есть информация, что на 4s и пропах 12Х3.8 на 50% газа он тянет 560 г (rctigermotor.com/show.php?contentid=142).
Не подскажите у кого с какими двигателями и пропами были хорошие результаты в плане маневренности, меньшей вибрации и время полета?
Да и еще одна странная вещь произошла, при снижении коптера на высоте 1,5-2 метра произошел небольшой краш. Ни с того ни с сего резко перевернуло раму в лево в зубилом вниз. Просмотрел все на предмет плохого контакта или не затянутого пропа, все в норме. Что это было так и не понял.
Всем доброго дня, или вечера. На выходных удалось немного полетать в первый раз. Подвес пока не подключал, но на земле работает вроде нормально, хотелось сначала облетать сам квадрик. Вес снаряженного аппарата вышел с камерой 2400 г.( двигатели МТ3506(650кV), АРС 12Х3,8, NAZA, ОРТО 30А dji, 4s 5000 25c).
Gain вывел на крутилки на пульте, вроде бы настроил, но все равно должного отклика от квадрика получить не могу. При повороте вокруг своей оси квадрик теряет высоту, приходиться постоянно подправлять высоту газом, причем на удержание газа не 50%, а где то 60-70 % да еще и с запозданием, среднее время полета выходит 7-8 минут.
Такое впечатление, что мощности на этих пропеллерах или двигателях не хватает. На сайте Т-Motor по данному двигателю есть информация, что на 4s и пропах 12Х3.8 на 50% газа он тянет 560 г (rctigermotor.com/show.php?contentid=142).
Не подскажите у кого с какими двигателями и пропами были хорошие результаты в плане маневренности, меньшей вибрации и время полета?Да и еще одна странная вещь произошла, при снижении коптера на высоте 1,5-2 метра произошел небольшой краш. Ни с того ни с сего резко перевернуло раму в лево в зубилом вниз. Просмотрел все на предмет плохого контакта или не затянутого пропа, все в норме. Что это было так и не понял.
У назы барометр глючит от воздушных потоков с ротора, потому я не использую режим фиксации высоты. На форумах назы предлагают экранировать.
У меня тоже был похожий переворот (видео внизу). Предположительно - контроллеры двигателей дают глюк, но это только догадки. Достоверно причину переворачивания не установил. Теперь летаю с t-motor регуляторами, больше не переворачивался.
Обнаружил странность в таблице параметров на странице T-motors: www.rctigermotor.com/show.php?contentid=142
тут для APC13*4 указано меньшее потребление, чем для APC12*3.8 - такого не бывает. Сам последнее время испорльзовал 13*4, продолжительность не засекал, вроде 10 минут установленных на таймере вылетывает новрмально.
[QUOTE=Willi1;4072859]… Если Вы летали на назе-поробуйте подлетнуть немного на мануале-какой процент газа? Если выше 75-надо ставить большие пропы или повышать напряжение. Из-за этого бывают кувырки.
Если Вы летали на назе-поробуйте подлетнуть немного на мануале
Ну на счет “на мануале”, что то я очкую. Всего один раз попробовал еще на раме F450 и то не удачно.
То что газа не хватает, я и так чувствую. Думаю попробовать поставить пропы побольше.
Наверно лучше питч побольше,или напряжение повысить-будет стабильнее.
Подскажите, кто знает?
Задавал вопрос в ветке про подвесы на прямом приводе, никто не ответил.
Может-ли двигатель напрямую управлять положением стедикама, вместо пружинок и серв? Или с таким мощным моментом двигателей просто не существует?
Смысл? Если через пружины-то серва удобнее и компактнее,напрямую-сильнейший момент нужен…