подвес на бк моторах (open source) от немцев

Люди добрые. всю ветку не осилил.
купил вот это www.aliexpress.com/item/…/1751082372.html
через эту оболочку SimpleBGC_GUI_2_2b2 сконнектился с девайсом.
Подскажите, можно ли из этой оболочки настраивать контроллер?
Какую и чью крайнюю прошивку лучше залить?
Желательно с сылками.
Ну так настраивайте и летайте с удовольствием. просто для полетов и поснимать хватит с головой.
Все сразу хотят запороть китайское чудо а потом писать ПОМОГИТЕ!!!
Подскажите, можно ли из этой оболочки настраивать контроллер?
да
Какую и чью крайнюю прошивку лучше залить?
Вам мало ломанного АлексМоса 2_2b2 залитого китайцами ?
У меня есть ещё комплект моторов, так самое интересное что на одном трясёт больше на другом меньше. Уже не знаю что дальше пробовать.
давайте последовательно попробуем исключить тряску, хотя бы для зеркалотеста.
- если по одной оси датчик работает, то имеет смысл повернуть или перевернуть датчик сделать переключение осей swap XY , reverse Z.
- поменять местами моторы, может обмотка на моторе повреждена.
- может микросхема контроллера ШИМ на одной из осей повреждена. Может электролит кондёры в цепи питания этих же контроллеров не припаяны. Проверить температуру этих микросхем. Прозвонить может там и питание прыгает.
- Пропаять разъёмы- тут была картинка что контакты выводов на мотор коротили.
А скажите, такие платочки хорошо работают с маленькими моторами под проху?
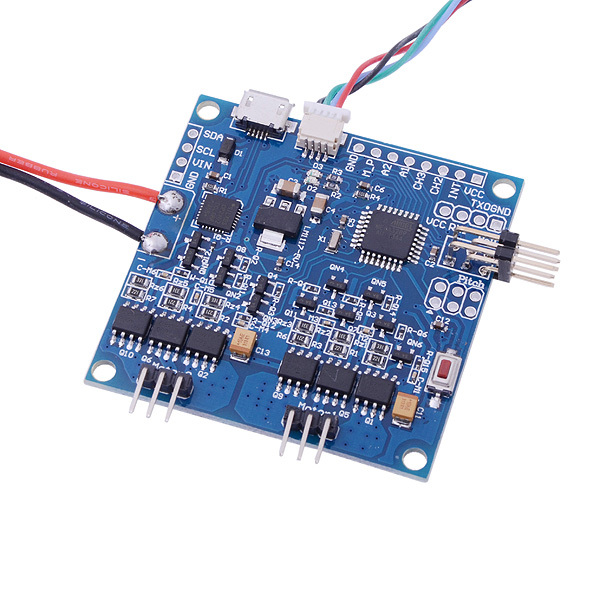
или лучше такие?
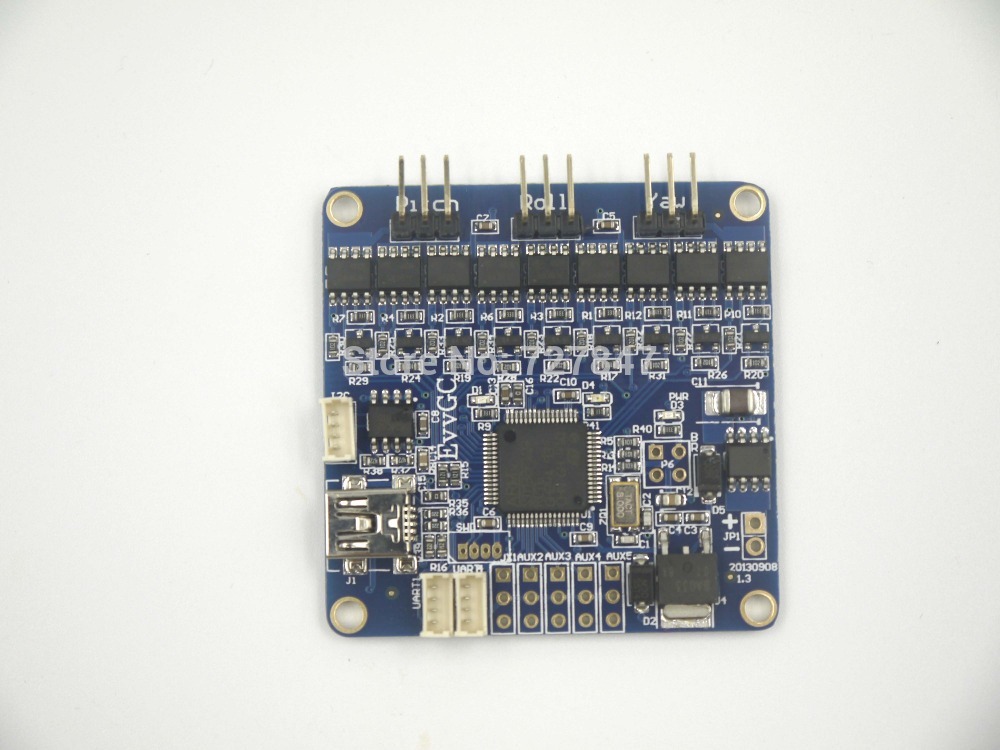
А это разве обе немцы?
У меня, и не только, верхний контролллер в комплекте подвеса под проху, бьемся с настройками в соседней ветке.
у меня такой как на верхней картинке. v 2.2b все ок
бьемся с настройками в соседней ветке.
Вы про хакнутый Алексмос? Это тогда к любым платам относится. С немецкой значит она тоже работает.
Больше волнует насколько тут правильная схемотехника.
Вы про хакнутый Алексмос? Это тогда к любым платам относится. С немецкой значит она тоже работает.
Больше волнует насколько тут правильная схемотехника.
именно она
А что хуже работает чем на оригинальных платах?
Отпишусь сюда, ибо прошита была именно brugi…
Короче, случайно воткнул разъем питания наоборот… Переполюсовка… И вроде бы такого быть не должно - разъемы-то с защитой - а хватило цепи замкнуться. Короче, от платы пошел легкий душок (не успел заметить, откуда именно) и на оборотной стороне перебило одну дорожку. Дорожку восстановил как мог, но не помогло. Прозвонка ближайших smd’шек показала что C12 не звонится совершенно. Подскажите люди добрые, что там за емкости? …если я конечно правильно понимаю.
Отпишусь сюда
Эти платы, по моему опыту, вообще не жильцы. Сгорели без видимых причин две (никакой переполюсовки). Даже две с половиной, можно сказать: с одной на другую после двух случаев были перепаяны детали, после чего случился третий “пожар”.
на rctimer ломаный алексмос не работает(
шьеца,но калибровка датчика не катит.
Переполюсовка…
Спасибо leprud, вспомнив навыки пионера-радиолюбителя удалось выяснить что на выходе регулятора 1.3в
Будем менять…
За 16 баксов наверное все может быть. Вот ужо заменю регуль, посмотрим…
Скажите, а почему у одних датчик по пяти проводам подключен, а у других по четырем?
В общем моторы вибрируют в движении, т.е видео получается с мелкой тряской. Какие бы пиды я не ставил всё равно моторчики похрустывают
В общем эпопея продолжается, кое как настроил, при этом заменив моторчик питча,перемотал с dvd roma, но всё равно нет особой плавности в движении. Вычитал в инструкции к алексмосовскому контроллеру, что при похрустывании и постукивании следует заменить подтягивающие резисторы. Может дело в них, не знаю где находятся, может кто в курсе, rctimerовский контроллер, или кто нибудь уже менял, подскажите.
Столкнулся с такой ситуацией:
- контроллер с гудлака (за 16 баксов который)
- прошивка brugi v50r207
- моторки с rctimer
- конструкция из двух полосок алюминиевой ленты и куска корпуса от БП принтера 😃
Камера закреплена временно - резинками - на время теста для более точной балансировки.
Вчера настраивал сугубо по мануалу sourceforge.net/p/…/PIDtuningguide/
Добился, как мне - неопытному - кажется, достаточно четкого и быстрого срабатывания:
www.youtube.com/watch?v=8mvQ8MP1slc&feature=share&…
Однако, утром обнаружил что подвес перестал работать так, как вчера. По питчу (а с ним основные проблемы) стал дергаться и не держал горизонт. Пришлось снова покрутить пиды… Сейчас все ок, но я что-то уже не уверен.
Кто что подскажет?
- Заметил что очень сильно меняется качество стабилизации в зависимости от напряжения. В начале полетов более-менее нормально, но с разрядкой аккумов результат ухудшается. Видел в настройках что вроде бы есть возможность компенсации падения напряжения. Подскажите как правильно настроить эту компенсаци?
- Значение Battary Voltage у меня какое-то странное: 0,72. Не пойму почему такое странное значение…
- Толком не могу понять, зачем нужен Voltage-Sense-Modification - припаивание к контроллеру двух резисторов. Для чего это нужно?
- Значение Battary Voltage у меня какое-то странное: 0,72. Не пойму почему такое странное значение…
т.к. у Вас не сделано Voltage-Sense-Modification он измеряет то что приходит на порт, т.е. обычные шумы, от этого и такое странное значение.
- Толком не могу понять, зачем нужен Voltage-Sense-Modification - припаивание к контроллеру двух резисторов. Для чего это нужно?
Это как раз нужно для правильного измерения напряжения для внесения корректировки в алгоритм управления. Без этого не будет измеряться напряжение.
Спасибо! А без правильного измерения напряжения не будет работать компенсация по напряжению, правильно?
А эти резисторы не нужно подбирать? Они всегда будут 10кОм и 2,2кОм? Интересно, почему эти резисторы сразу на заводе не припаивают?