подвес на бк моторах (open source) от немцев

Если не умеет, можно отдать кому-то, что бы припаял в зад разъём.
Ды я не против, пожалуйста, припаять назад конечно лучше, но можно ведь внимательно прочитать сам вопрос.
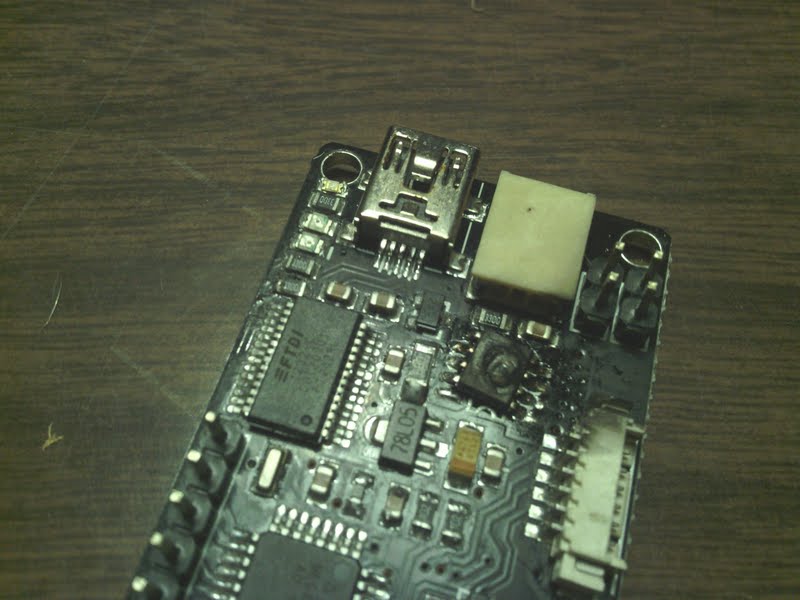
Подскажите как (каким кабелем) можно подключить плату с оторванным ЮСБ портом к компьютеру .
Есть такой подвес.



Методом околонаучного тыка выяснил, что на нем стоит прошивка v46.
После продолжительных тестов в попытке заставить подвес держать горизонт и убрать вибрации по оси roll было принято решение - обновить прошивку. Поскольку операция стремная в том плане, что в результате можно получить “кирпич”, возник ряд вопросов:
- совместимы ли аппаратно версии ПО ? т.е. можно ли прошивать v49 или v50 на плату, где ранее была установлена v46 ?
или же придется менять аппаратную часть для т.ч. сменить версию прошивки ? - требуются ли к-либо изменения в исходниках перед прошивкой ?
Аппаратная часть таже, менять в прошивке ничего не надо. А что это за контроллер такой?
После продолжительных тестов в попытке заставить подвес держать горизонт и убрать вибрации по оси roll было принято решение - обновить прошивку. Поскольку операция стремная в том плане, что в результате можно получить “кирпич”, возник ряд вопросов:
- совместимы ли аппаратно версии ПО ? т.е. можно ли прошивать v49 или v50 на плату, где ранее была установлена v46 ?
или же придется менять аппаратную часть для т.ч. сменить версию прошивки ?- требуются ли к-либо изменения в исходниках перед прошивкой ?
Ну вообще, программно довести что-то на базе Arduino до состояния кирпича - невозможно. Так что не бойтесь, и прошивайте. Я вчера, руководствуясь советами здесь, свой 048 на 050 перепрошил.
- Совместимы, насколько мне известно.
- В моём случае оно, вроде, заработало без изменений в исходниках (из рук вон плохо, но видимо надо настраивать)
Постарайтесь сохранить Ваши текущие настройки, чтобы в случае чего откатиться.
Товарищи, подскажите, вот поставил, значить, вчера 050 взамен стоявшего 048. Оба мотора равномерно дёргаются (т.е. движения по 2-3 раза в секунду, на пару градусов туда-обратно). Вернул 048 - всё прекрасно работает на штатных настройках. Есть ли для этого простое объяснение и решение? Пока остановился на 048, но придётся колдовать с расположением датчика. Хочется таки 050.
А что это за контроллер такой?
икс его знает, внутрь заглянуть не могу, платы спаяны между собой. На одной плате стоят ключи для моторов, на другой - мозги. Вообще это был RTF набор с алиэкспреса, ссылка на продукт уже невалидная, так что показать не смогу.
Пока искал для этого чуда ПО наткнулся на тему, посвященную данному подвесу на RC groups.
Там же есть фотка платы со слегка обугленными компонентами:
давно не следил за темой,подскажите немецкая прошивка также уступает алексмосовской или они уже на равных?
уступает алексмосовской
“как сравнить Android и IOS ?”
открытый софт всегда будет чуть хуже…(это чисто моё мнение). Сам пользуюсь прошивкой немцев, меня целиком и полностью устраивает за потраченные деньги и нервы.
ситуация осталось такой же,или немец уже догоняет алекса?
ситуация осталось такой же,или немец уже догоняет алекса?
Как мне кажется исходя из этого видео, мой, не очень настроенный Brugi, даже перегоняет Alexmos 😄
Интересно, как они добились такого говенного качества от Brugi в этом видео…
Как мне кажется исходя из этого видео, мой, не очень настроенный Brugi, даже перегоняет Alexmos 😄
Интересно, как они добились такого говенного качества от Brugi в этом видео…
Видимо пословица “делай хорошо, а плохо само получиться”
поддерживаю вопрошение.
Как мне кажется исходя из этого видео, мой, не очень настроенный Brugi, даже перегоняет Alexmos 😄
Интересно, как они добились такого говенного качества от Brugi в этом видео…
Это очень старое видео. Я думаю, причина плохой работы “немца” в этом. Проект не стоит на месте.
К сожалению, не слежу за успехами Alexmos, но купил с пол года назад plug&play настроенный, закрученный и спаянный подвес. Оказалось там старая версия прошивки от alexmos - пришлось узнать это чтобы настроить “расходы” наклона камеры. Плохо работает, заметно хуже немца на моём другом коптере. НО! Это старая 0.5х прошивка, поэтому сравнивать напрямую нельзя.
Пока что оставил как есть, но хочу прошить немцем тот подвес. У меня к нему нет вопросов совершенно. Лишь доверие, основанное на почти годе безпроблемной съёмки с коптера.
заказал вот такой www.aliexpress.com/snapshot/6124490790.html кто нить работал с ним?юсб чип от силабс ср2102,продавец говорит что алексмос 2.2 уже установлен,когда спросил где вы взяли ломанный алексмос 2.2(как я знаю его пока еще нет)продаван сразу выскочил из чата)))
100 лет уже ломанному 2.2
как я знаю его пока еще нет
Ужель свежий, ломанный AlexMos прямо на официальном сайте AlexMos?!
свежий, ломанный
А, я вас не так понял. Я подумал, что вы в принципе говорите, что кетайсы нашли 2.2 откуда-то да ещё и ломаный, прямо с рабочего стола у разработчиков типа утянули. Ломаный - да, я сам не видел, но и не искал правда давно уже. У меня 2.2b2 последний найденный. Я буду переделывать свой подвес, не нравится он мне 😃
Щас хочу попробовать накатить 050r217, вот даже интересно.
Почему в конфиге #define MPU6050_DEFAULT_ADDRESS стоит HIGH и надо каждый раз править на LOW? И даже инструкцию для этого сделали. Зачем это всем делать? Неужели нельзя сразу выкладывать с нужной опцией? Никак не могу понять.
Странно, я ничего не менял и все прошивки у меня работали. Даже с разными сенсорами.
Щас хочу попробовать накатить 050r217, вот даже интересно.
Почему в конфиге #define MPU6050_DEFAULT_ADDRESS стоит HIGH и надо каждый раз править на LOW? И даже инструкцию для этого сделали. Зачем это всем делать? Неужели нельзя сразу выкладывать с нужной опцией? Никак не могу понять.
наверное это зависит от вида платы к которой вы сосбираете прошивку?
у разработчиков одна плата, у вас другая