Стедикам из подвеса на бесколлекторных двигателях.

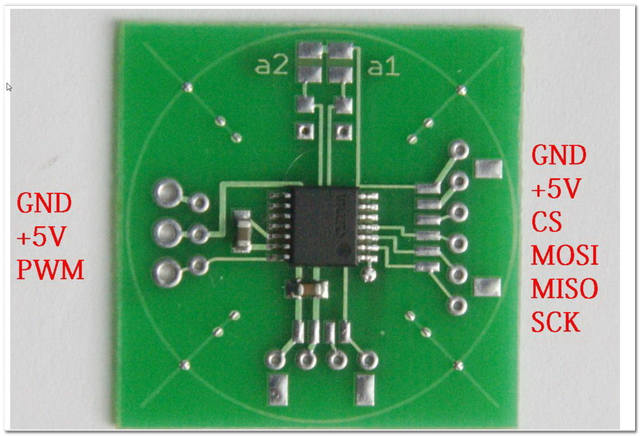
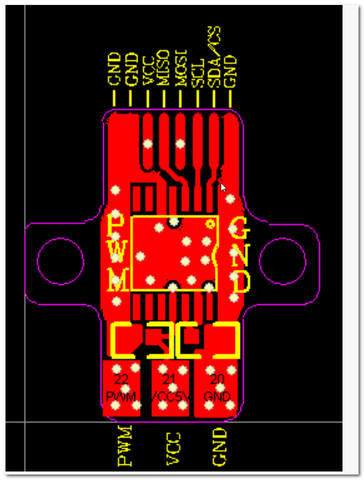
подскажите по соответствию выводов , верно ли я обозначил.
GND - GND
+5V - VCC
CS - SDA\CS
MOSI - MOSI
MISO - MISO
SCK - SCL
Приветствую форумчан. Спецы, помогите.
Beholder EC1, сгорел процессор. Заменил, прошил настроил, все заработало как надо.
И, как говорит товарищ, при очередном включении опять не работает. Опять сгорел процессор.
Подскажите, куда копать.
Видел видео, где ставят на I2C для защиты диоды или стабилитроны.
Подскажите их номинал и как правильно поставить?
Друзья, сегодня на моей самоделке помер слипринг - по ходу дела, по линии движка вышел из строя. Видать, в общем бракованный он был - вначале мертвая зона появилась по линии энкодера, а теперь с линией движка траблы. Таки худший сон сбылся - сдох стаб прямо на съёмке, на рекламе. За другим поехали, потеряли час, но все досняли. А теперь полночи менять слип, благо хоть есть на что
А теперь полночи менять слип, благо хоть есть на что
если не сложно препарируйте слипа и сделайте фотоотчет … интересно в каком состоянии контакты , возможная причина выхода из строя …
Видел видео, где ставят на I2C для защиты диоды или стабилитроны.
это не совсем диоды и стабилитроны , почитать можно например тут compel.ru/…/5-poluprovodnikovaya-zashhita-obzor-os…
на шину с уровнями 3,3 вольта нужен с самым малым напряжением пробоя (обычно начинается с 6,4 вольта ) но …
но защитит только от импульсных помех , статического электричества и тому подобного …
в случае с замыканием линий интерфейса на линию питания или силовую линию мотора оно никак не спасет …
фотоотчёт однозначно будет!
блиииин, кирдык… это не слип, во всяком случае точно не по оси ROLL. но что тогда? сейчас соберу всё обратно, попробую включить и если опять то же самое будет, запишу видео работы стаба, показания датчиков в GUI и всё остальное, может кто-то что-то подскажет
в общем пересобрал, обнаружил немного соплей, но это не о том. далее полез таки в прогу и обнаружил, что неверно было выставлено направление вращения моторов. ладно, сделал, всё работает. но беда не приходит одна))) ни с того, ни с сего у меня тупо сдыхает набортный стаб 5 вольт и мой стаб теперь работает только при подключении к компьютеру или к павербанку. вот же ж говно эти тини платы… с другой стороны очень хорошо, что всё остальное живое!
приветствую, коллеги! собираюсь делать стабилизатор под камеры типа Black Magic URSA, Red Epic и Arri Alexa Mini с порядком моторов Cam-Roll-Pitch-Yaw для работы с шестом. хочется на каждой оси использовать по два мотора, установив их разнесённо, чтобы обойтись и вовсе без дополнительных внешних подшипников. вопрос в выборе моторов, их подключении и платы управления. вот такие моторы надыбал ru.aliexpress.com/item/…/32845971509.html?algo_exp… но пока неясно, потянут ли пара таких моторов на каждой оси камеру в 7-8кг (стабилизатор будет с энкодерами, само собой), можно ли просто объединить провода моторов попарно (с соблюдением направления вращения), или там всё сложнее? так же неясно, хватит ли мощности классических плат, или нужны будут дополнительные драйвера. если да, то какие? заранее спасибо за советы!
без энкодеров такая схема точно работает … моторы соединяются параллельно … но … есть один нюанс …
чтобы это работало нужно чтобы магниты одного мотора стояли относительно статора в том же положении что и второго …
для этого систему нужно включить с отпущенными креплениями одного из моторов … тогда моторы сами станут в нужное положение …
как это будет работать с энкодерами не знаю (не пробовал) …
по части драйверов , если моторы достаточно высокоомные то работать будет … возможно потребуется дополнительное охлаждение платы , только правильное , те от штатных теплоотводов 8313 а не так как это сделано в любимых вами “ТИНИ ПРО” резиной от крышек …
для низкоомных моторов потребуются внешние драйверы …
вообще для таких больших камер существует ПРО версия платы , там точно все потянет …
еще лучше воспользоваться CAN моторными платами , но они фактически в состоянии БЭТА …
С тини покончено раз и навсегда после того, как третья плата сгорела(( так что буду стандартную плату брать. Под высокоомными моторами что имеется ввиду
сопротивление обмоток … чем выше сопротивление тем больше витков намотано на зуб , тем на большее напряжение питания рассчитан мотор и тем меньше ток обмоток …
стандартная плата держит до 6S питания …
ЗЫ: тот мотор что по вашей ссылке низкоомный 10,3 ома , те у него хоть и много полюсов , но намотан он толстым проводом … высокоомные порядка 18 ом и выше …
Ясно, значит если использовать его, то придется перемотать на большее количество витков проводом меньшей толщины?
да , или использовать внешний драйвер …
можно взять драйверы полумостов типа IR2302 , и при питании 2-4S им на вход подавать сигнал с выходов 8313 (это чтобы не уродовать контроллер) …
в свое время делал такие драйверы для ардуинок под мартинз/алексмос прошивку …

мосфеты стоят на ток 20 ампер …
такая плата , только с распаянным бустером питания, у меня крутила обычные (не гимбаль) моторы 130Kv от одной банки LiFePo …
Тем не менее, в целом, при правильном охлаждении мне должно хватить стандартной платы? Питать лучше от 4s, или выше? От этого ведь и момент на моторах зависит, верно?
8313 по даташиту до 2,5 ампер в пике , но сопротивление ключей аж по 0,25 ома , так что греться при таком токе оно будет неслабо … главное чтобы Китайцы не сЪэкономили припой на брюхе чипа …
я почему и рекомендовал высокоомные моторы , чтобы мощность подымать не за счет тока а за счет напряжения …
питать лучше так чтобы параметр павер был высоким , но не максимальным (при повер близком к 255 не остается запаса на коррекцию мощности при разряде батареи) …
при очень низком повер идет потеря разрядности ШИМ (менее 128 - 1 разряд, менее 64- 2 разряда , менее 32 3 разряда и так далее) что тоже не хорошо …
тяжелее всего будет совместить 2 мотора в единое целое , а не подобрать оптимальное количество банок в батарее …
ясно, значит буду условным первопроходцем! в принципе, если не получится, движки всегда можно пустить на другой стаб, а для тяжёлого заказать новые, соответствующие моторы
приветствую, коллеги! собираюсь делать стабилизатор под камеры типа Black Magic URSA, Red Epic и Arri Alexa Mini с порядком моторов Cam-Roll-Pitch-Yaw для работы с шестом. хочется на каждой оси использовать по два мотора, установив их разнесённо, чтобы обойтись и вовсе без дополнительных внешних подшипников. вопрос в выборе моторов, их подключении и платы управления. вот такие моторы надыбал ru.aliexpress.com/item/…/32845971509.html?algo_exp… но пока неясно, потянут ли пара таких моторов на каждой оси камеру в 7-8кг (стабилизатор будет с энкодерами, само собой), можно ли просто объединить провода моторов попарно (с соблюдением направления вращения), или там всё сложнее? так же неясно, хватит ли мощности классических плат, или нужны будут дополнительные драйвера. если да, то какие? заранее спасибо за советы!
использую такие моторы в своих проектах, ничего фантастического, обычные китайские слабо намотанные моторы(дуалскаи в мотают лучше и плотнее) с сопротивлением в 10 ом их можно спокойно питать от 6S. Кстати собраны они на клей, в домашних услвиях разбирать будет крайне проблематично.
Раньше я использовал дуалскаи 7015, некоторые перематывал сам на сопротивление 6,5 ом под питание 4S, кстати тюни про отлично справляется с такой нагрузкой, тепло рассеивается на алюминиевый корпус, он же силовой элемент подвеса.
спокойно питать один мотор, или два? при параллельном соединении моторов сопротивление будет уменьшаться вдвое
по одному имел ввиду, если по два на ось, то 4S.
Смотрю тема фактически заглохла. Вот интересные наработки : www.geardads.com/gimbal-support-letus-exo17/ Линейка продукции Letus-Helix_Products
Сергей, я жду свой комплект движков, энкодеров, слипрингов и контроллер iflight-rc.com/alexmos-32-bit-bgc-with-gbm110-150t… от китайцев, как приедет буду немного тему обновлять. на ближайшее время в планах сделать изириг + серену, так как стабилизатор планирую под урсу мини, а для съёмки с рук она тяжеловата, нужна разгрузка