STorM32 BGC: 3-Axis STM32 Brushless Gimbal Controller

я его использовал для съемок с рук, и бывало заваливал угол.
так при превышении какого-то определенного угла наклона, стаб просто останавливался в определенном положении, но мощность на двигателях оставалась.
при чем, это было больше по оси roll, по питчу и по яву такого не было.
лечилось только перезагрузкой (выкл-вкл).
Ошибка по I2C, скорее всего. Стали использовать стабилизатор напряжения и пропало?
версия платы 1.33
Поискал гугелем. Тот такую не видел.
Покажите.
сколько ему интересно надо для идеальной работы? кто тто тут писал что виснет при напруге больше 11.5
Жаль, что люди не пишут версию платы.
3S полностью заряженная - 12.6V, v1.31 работает как часы.
при подключении к компу часто мониторил работу контроллера, не было ошибок по I2C.
сам вот удивляюсь.
но как мне кажется (не утверждаю т.к. со схемотехникой этого контроллера не знаком),
что движки точнее ключи питаются напрямую от батарейки.
и по-этому настраивая на одном напряжении, получаешь косяки на другом.
во общем у меня так, поставил стабилизатор напряжения и стабильность появилась.
сколько ему интересно надо для идеальной работы? кто тто тут писал что виснет при напруге больше 11.5
У меня зависал при напряжении >12В. Причем ошибок по i2c не было. Питается от 3S.
В итоге впаял в цепь питания диод. На нем падение 0.7В. Стало все идеально.
впаял в цепь питания диод. На нем падение 0.7В. Стало все идеально.
Не понял суть, поясните, пожалуйста. Зачем диод, в какое место цепи? Как объяснить исчезновение зависаний и чем они были вызваны?
Диод впаивается в разрыв линии питания (последовательно). Падение напряжения на диоде 0.7V. Т.е. на входе в плату получается от заряженной 3S 4.2V*3-0.7=11.9V (для разряженной 8.3V).
AndyGr Плата какая?
Не понял суть, поясните, пожалуйста. Зачем диод, в какое место цепи? Как объяснить исчезновение зависаний и чем они были вызваны?
Я обратил внимание, что подвес “зависает” только при “полной” батарее. Отлетав треть аккума зависаний уже нет. Экспериментальным выяснил, что контроллеру “не нравиться” напряжение > 12В.
Если в цепь питания прибора поставить диод, то он создаст падение напряжения на приборе от 0.5В до 1.2В в зависимости от типа диода. Вот первая ссылка из гугла на тему “падение напряжения на диоде”. Я нашел какой-то китайский диод от солнечной батареи. Он дает падение в 0.7В. Поставив его в цепь питания подвеса при напряжении на аккуме 12.6В на подвесе будет 11.9В.
AndyGr Плата какая?
Комплектная, что идет с подвесом от GLB. 1.31
Комплектная, что идет с подвесом от GLB. 1.31
Интересно. У меня тоже 1.31 с подвесом от гудлакбая, но такого бага нет.
У моей платки 1.31 иногда бывает выключение в полете. Просто в какой-то момент моторы “слабеют” полностью, выглядит стремновато через очки. Обычно во второй половине полёта или под конец. 1 из 15-ти полетов примерно заканчивается этим. С чем связано - пока не понял. Сейчас от 8.5V питается, планирую на 12V попробовать полетать. На rcgroups иногда проскакивают такие жалобы. I2C ошибок нет, на питание в GUI не жалуется… причины туманны 😃
Подвес на 2 оси для GoPro, установлен фронтально. Бывают завалы по горизонту часто, а так хорошо работает.
посмотри в настройках на какой вольтаж настроен подвес для отключения…
I2C ошибок нет
Дело в том,что я как раз таки “поймал” ошибку I2C в момент “зависания”. Они не сыпались тысячами, всего было 2! Поэтому мне кажутся скептическими рассуждения про вольтаж питания. Есть всеми любимая плата 1.31, у которой по ттх минимум 8В и всё. Выразил сугубо своё мнение и не утверждаю, что так оно и есть.
Друзья, а можно менять порядок моторов? Традиционный трехосевой гимбал имеет такой порядок:
1 мотрр- яв
2 мотор- рол
3 мотор- питч
Недостаток классической схемы- невозможность съемки камерой вертикально вверх, развернуть камеру можно но объектив упирается в мотор яв и верхнюю пластину подвеса.
Вариантом избежать этот недостаток- поменять моторы яв и питч местами, мотор ява получает третий номер и переходит под камеру, и уже не мешает. Получаем ограничения по яву, но в случае коптера это не большая проблема, коптер по яву сам крутится. Получаем полный обзор как на двухосевом гимбале.
Я это испытал на Storm32 и получил отрицательный результат, прошивка учитывает порядок моторов и произвольно их менять не получается, я так понимаю нужна спец настройка порядка следования моторов. Возможно ли такое, или оно уже есть и я чего то не понимаю?
Может я не понял проблемы.
Что мешает при калибровке расположить плату (соответственно и набортный датчик) перпендикулярно?
Поместив pitch под камеру Вы ведь не сможете снимать то, что внизу. Объектив будет утыкаться в мотор.
Возможно ли такое, или оно уже есть и я чего то не понимаю?
Experts only, expert tool, motor mapping. Расскажите, что получится 😃
Поместив pitch под камеру Вы ведь не сможете снимать то, что внизу. Объектив будет утыкаться в мотор
Под камерой я поместил яв, он нулевой, все остальное сбоку и сзади…
Experts only, expert tool, motor mapping. Расскажите, что получится
к сожалению в моей версии 0.70 нет варианта M0-yaw, поэтому попробовать не получается. зато алекс мос говорит что у него такая возможность есть…
Arkady68, так должно быть?
Прошивку, тем более такую старую, нужно обновлять. Новые версии не просто так выходят.
Ребят, я правильно понимаю, что:
Mot2-yaw
Mot1-roll
Mot0-pitch
?
Вроде простой вопрос, а ответа тут не нашел.
Пришел самосборный комплект и пока не получается его заставить работать. Начинает крутиться, упирается сам в себя и моторы вырубаются. Залил параметры, которые китаец прислал, отклибровал по шести осям, но ситуация не поменялась. Может просто замереть в каком-то косом положении и не реагировать на раскачку, при этом моторы сильно греются…
Буду благодарен, если подскажите что делать с этим товарищем…
Вопрос как искать. 😃
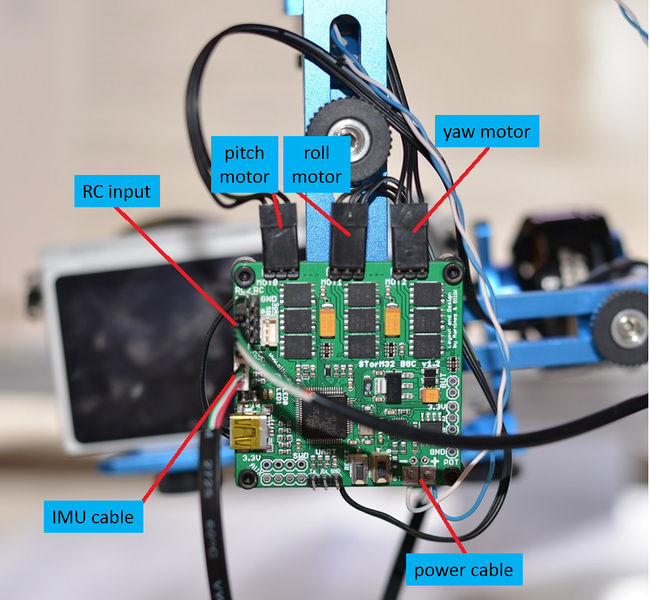
The usage of the three connectors is
Mot0: Pitch motor to point the camera up/down
Mot1: Roll motor to stabilize the horizon
Mot2: Yaw motor to turn the camera left/right
Arkady68, так должно быть?
Нет, не так. У вас нулевой мотор питч. В таком сетапе вы сне сможете снимать вниз. У меня нулевой мотор яв.
Да, вроде новые прошивки позволяют все вариации моторов, вот и сижу чешу репу как прошить контроллер, у меня есть три типа и ни на одном нет подключения FTDI. Все миниатюрные, три нижних с этой странички. Сижу, чешу репу 😃
Прошился до 2.01, включаю подвес. Плата отмигивает, но не сигнализирует о готовности к работе. Моторы без напряжения.
Откатываюсь до 0.96 - всё ок.
Снова прошиваю 2.01 - моторы не работают. Во вкладке “сетап” моторы в положении “нормал”.
Пробежался по ветке Олли, никто о таком баге не отписывается.
Ктонить пробовал 2.01?