STorM32 BGC: 3-Axis STM32 Brushless Gimbal Controller

на всех трех появились отверстия в одном месте ,я поначалу подумал ,что другие отличаются ,теперь понял ,что выгорели все 3 ,вопрос в причине ,что послужило причиной,у меня была аварийная посадка ,уже давно,отлетели ноги ,и коптер секунд 6 вертелся на подвесе ,пока я дизармил винты ,не понял ,пока не решил подключить сейчас управления с пульта по яв
это не мосфеты а драйверы для IGBTшек (TC4452 или им подобные) … есть риск что выгорели и ноги на проце … для начала выпаять сгоревшие 8 ножки и посмотреть что там на приходит к ним на 2 ногу …
на всех 2х ногах должны быть импульсы амплитудой 3,3 вольта (можно сравнить с тем что подается на живые драйверы) если гдето их нет или они маленькие то менять еще и проц …
если проц дохлый ИМХО проще купить новую плату , притом сразу на DRV8313 , они поживучее будут …
Ща присмотрелся к фото , судя по разводке действительно стоят мосфеты , те все зависит от того что там с обратной стороны …
если есть еще 8 ножки (драйверы мосфетов ) то плату стоит восстанавливать … если стоят мелкие мосфеты то лучше сразу на помойку … такие платы в любой момент (при программном сбое) могут выпустить волшебный дым …
Если повезло и сгорели только одни этоти мосфеты - заменить и дальше использовать. Найти по маркировке на других. Они одинаковые. на всех осях.
Но могли погореть и другие детальки. Мотор не коротит обмотки?
не проверил еще ,просто управление по яв настраивал ,мотор двигаться не захотел ,только слегка подергивался ,чуть -чуть
есть риск что выгорели и ноги на проце … для начала выпаять сгоревшие 8 ножки и посмотреть что там на приходит к ним на 2 ногу …
на всех 2х ногах должны быть импульсы амплитудой 3,3 вольта
можно поподробнее,yadi.sk/d/BiBm34713RWLpN эти ноги выпаять?
“проц дохлый”-вообще остальные оси управляются (питч и ролл)
и я имею для проверки только мультиметр
как я могу понять сгорели транзисторы :4606 мосфеты ,пока я могу поискать их на замену .
Юрий ,я вас почти не понимаю ,можно попонятнее,поясните скудоумному нерадиолюбителю ,как проверить .
можно попонятнее,поясните скудоумному нерадиолюбителю ,как проверить
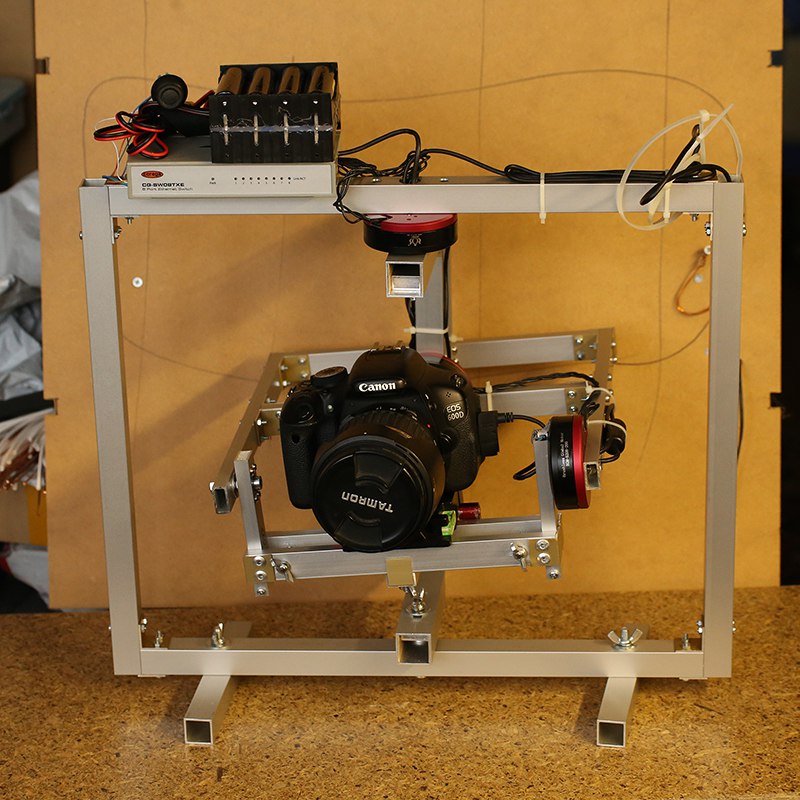
для начала нужно фото обратной стороны платы , чтобы понять по какой схеме сделаны выходные ключи …
сегодня ковырялся с новыми платам , которые v3.3M … github.com/olliw42/…/storm32-nt-bgc-v330m
у этих плат стабилизатор 5v сделан на LMR14206 … этот чип позволяет работать до 42v на входе , те до 10S … чтобы поднять входное до этих самых 42 вольт нужно вместо диодов PMEG3010ER использовать PMEG6010ER а конденсаторы С1 и С2 должны быть на 50 вольт … проверено, работает !!!
моторные платы T-Storm32 тоже будут прекрасно работать на 42 вольта , нужно только поставить более высоковольтные входные конденсаторы .
LMR14206 выдает по 5v максимум 600 ма . если нужно больше , то вместо LMR14206 ставим AOZ1280 , диоды вместо PMEG6010ER ставим PMEG3020ER , дроссель L1 вместо 10Uh ставим 2.2Uh , все остальное без изменений . получаем на входе до 28 вольт (6S) , на выходе до 1,2ампера . также проверено , работает !!!
[QUOTE=Gapey;7280588]для начала нужно фото обратной стороны платы , чтобы понять по какой схеме сделаны выходные ключи …
ok.завтра дома буду ,скину.
yadi.sk/i/UA7RAygU3Rbok7
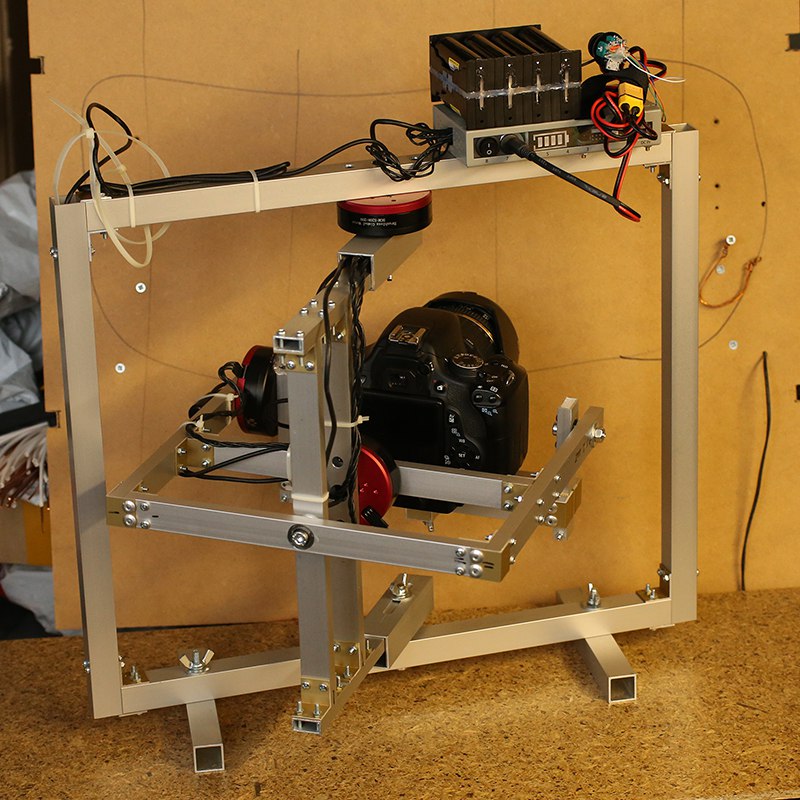
другая сторона
на MOT-2 сгоревшие мосфеты
завтра поеду в областной центр ,в чип и дип закуплю нужные детали .Юрий ,если зайдете ,подскажите ,что мне еще может понадобиться.
на обратной стороне сдвоенные мелкие мосфеты в 6 ногих корпусах … www.s-manuals.com/pdf/…/pmgd780sn_nxp.pdf
могут и они быть дохлые …
нужно проверить что на них приходят импульсы с микроконтроллера ( на 5 ногу этих 6х ножек ) если гдето их нет то выпаять эту мелочЪ и 8 ножку с другой стороны … если импуьсы не появятся менять микроконтроллер …
ЗЫ. лично я бы выкинул эту плату нафиг , ибо она собрана по схеме с негарантированным DEADTIME … если говорить проще, то качество работы какой схемы сильно зависит от напряжения питания , температуры , конкретной партии используемых деталей (разброс параметров) и погоды на марсе … и в любом случае она будет работать хуже чем схема использующая специализированные драйверы двигателей или драйверы полумостов … это все проходили еще много лет назад когда Aircam делал первые одноосеыве стабилизаторы из немецких регулей … с тех пор сильно продвинулся софт , но в схемотехнике выходных ключей ничего принципиально не изменилось …
На барахолке есть правильные платы, без мелких мосфетов.
Могу дать ссылки. 😃
Заменил 4606 мосфеты,вопрос решился,пока не знаю нужна ли другая плата,все работает
Помогите с пидами 😕
Ролл настроил сразу отлично, а вот питч каличный

Нашел видео настройки подвеса, может кому поможет
Правда настройку датчика по точкам наверное все таки лучше делать перед калибровкой и настройкой всего подвеса
Здравствуйте уважаемые друзья!! Вот приобрел сие чудо,но так и не решил для себя с чего начинать настройку этого подвеса с прошивки 096 с калибровкой по 6 точкам или намтройку пидов и всяких там вещей.С чего начинать посоветуйте.
Естественно с прошивки. Или настроить и не прошивать.
Помогите пожалуйста, я уже уйму времени убил на попытку настроить подвес. Хочу чтоб было как тут (только у меня 3 оси):
Версия 0.90
Я пробовал разные комбинации IMU orientation. Перекалибровывал сто раз - нифига. Не хочет выходить в горизонт. Все что я делаю похоже на тыканье пальцем в небо.
Наверняка же кто-то уже делал подобное? Подскажите пожалуйста как завалить монтажную площадку назад
В голове не укладывается как такое может быть если камера жестко прикреплена к этой пластине.
Да легко может быть, жёсткость же не 100%, а камерра самый энертный элемент ввиду массы, у самого таже проблема надо переносить датчик 😃
Вот тоже себе собрал под камеру поиграться 😃 Моторы 5208 (маловато по Yaw особенно), стабилизатор поставил на xl6019 выставил на 12в для питания контроллера, батарея из 18650 4S2P
Вот только вопрос есть: джойстик (потенциометры) подключеный на Pan входы отклоняет камеру с постоянной скоростью или скорость зависит от степени отклонения?
Добрый день! Давно читаю форум и благодаря ему многое получилось сделать. Проблема возникла вот какая, после падения квадрокоптера решил поставить данный подвес. Откалибровал, все работает, не могу подключить наклон камеры вверх-вниз. Раньше стоял двухосевой. И наклон камеры вниз-вверх работал, а тут получается либо наклонятся по горизонту начинает, либо по горизонтали крутится. Пульт родной фантомовский, наза. Подскажите как подключить
Добрый день! Давно читаю форум и благодаря ему многое получилось сделать. Проблема возникла вот какая, после падения квадрокоптера решил поставить данный подвес. Откалибровал, все работает, не могу подключить наклон камеры вверх-вниз. Раньше стоял двухосевой. И наклон камеры вниз-вверх работал, а тут получается либо наклонятся по горизонту начинает, либо по горизонтали крутится. Пульт родной фантомовский, наза. Подскажите как подключить
Все, подключить смог, другой вопрос, при наклоне до упора вниз камера начинает дергатся, как в ковульсиях. Как ограничить угол наклона? программно?
Да
Да
А не подскажите как? Прошивка 0.96, я так понимаю нужен параметр Pitch Pan Limiter, его у меня нету, Pitch Pad Deadband это другое?
Нужно открыть эту вкладку

и настроить по своим предпочтениям/
Питч? - значит его мин/макс крутить.
у меня так и настроено, как на вашем скрине. Какие параметры отвечают за ограничение наклона именно с пульта? или нет разницы? Pitch Min? До этого на старом подвесе такого не было, в смысле не дергался, думал сначала бракованный попался