STorM32 BGC: 3-Axis STM32 Brushless Gimbal Controller

В общем я донастраивался, пока подвес не начал дергаться, отключил - начал медленно крутиться pitch. Датчик который выносной определяется, но параметров не передает. В DataDisplay не отображаются изменения положения, на калибровке тоже пустые окошки. Видимо датчик который на камере бракованный, он и раньше работал видимо со сбоями, а я думал проблема в настройке. Вопрос теперь что делать? Менять датчик или плату целиком? Подвес был в сборе от этого продавца ru.aliexpress.com/item/…/32817328381.html , не проработал и два дня получается. Спор открывать поздно. отдельно датчик не продается, только вместе с платой, но заказывать у этого продавца не хочется, где гарантия что опять не сломается. Посоветуйте хорошего продавца и возможно более качественную плату?
Сделайте сначала скрин основного окна конфигуратора сразу после коннекта с контроллером. Там все иму определяются или нет?
Дотчик отдельно можно прилепить, вроде функционал позволяет.
все Imu Определяются
тогда логично предположить, что не в них косяк. Верно? Смотрите видео на офсайте внимательней, возможно что-то не так делаете.
Или пошагово здесь пишите со скринами. Иму (любое) если не работает, то сразу ошибку показывает.
почему тогда не считываются параметры с внешнего imu при калибровке? и в data display тоже на перемещения внешнего датчика никак кривые не реагируют?
у этих плат есть одна особенность …
в отличии от большинства других контроллеров подвесов на них нет 5 вольт питания … импульсный преобразователь делает сразу 3,3 вольта из батарейного …
а вот на большинстве сенсоров стоит стабилизатор 5в->3,3в … в том сенсоре что у меня еще стоит перемычка 0402 , которая закорачивает вход и выход этого стабилизатора …
на фото сенсора у elvies тоже присутствует такой стабилизатор ( в 3х ногом корпусе SOT-23) , но вот закорочены ли его вход вход с выходом по фото разглядеть невозможно … если нет то на сенсоре не хватает питания и он нормально работать не будет …
если сенсор определяется , то линии I2C скорее всего живы , но возможно что то с самим 6050 , например пробило конденсатор на 20 ноге …
сенсор стормивский можно поспрашивать на барахолке , может кто то купил себе NT сенсор , а родной валяется без дела … можно переделать GU-521 … ну или сразу купить/спаять NT чтобы использовать новые прошивки …
у этих плат есть одна особенность …
в отличии от большинства других контроллеров подвесов на них нет 5 вольт питания … импульсный преобразователь делает сразу 3,3 вольта из батарейного …
а вот на большинстве сенсоров стоит стабилизатор 5в->3,3в … в том сенсоре что у меня еще стоит перемычка 0402 , которая закорачивает вход и выход этого стабилизатора …
на фото сенсора у elvies тоже присутствует такой стабилизатор ( в 3х ногом корпусе SOT-23) , но вот закорочены ли его вход вход с выходом по фото разглядеть невозможно … если нет то на сенсоре не хватает питания и он нормально работать не будет …
Померял напругу, да на сенсор приходит 3.3 в
попробовать закоротить стабилизатор?
он по идее уже должен быть закорочен …
тоесть на нем на одной ноге должна быть земля , на других двух 3,3 вольта … если на одной меньше то закоротить эти ноги …
померил, вот так получается
на двух ногах стаба 3,15
приходит по шине на сенсор 3,22
такое падение вообще странно …
есть подозрение что в таком случае это не стабилизатор а пара защитных ESD стабилитронов … убедиться можно прозвонив эти две ноги с линиями шины I2C , если звонятся то это ESD и ничего закорачивать не нужно …
Да легко может быть, жёсткость же не 100%, а камерра самый энертный элемент ввиду массы, у самого таже проблема надо переносить датчик 😃
Вот тоже себе собрал под камеру поиграться 😃 Моторы 5208 (маловато по Yaw особенно)…
Здравствуйте, это мое первое сообщение на этом форуме. Михаил, меня заинтересовал ручной подвес для камеры DSLR (Canon 60D), хочу собрать его сам. Продумываю конструкцию. Хочу сделать что то подобное как у Вас, но внесу и свою лепту. Сейчас пока все в голове. Посоветуйте пожалуйста по электронике… если собирать то подойдут ли
- Два нижних мотора 5208
- Верхний 6324
ru.aliexpress.com/item/…/1552839302.html
или лучше 6208
ru.aliexpress.com/item/…/32601885396.html
? - Контролер
ru.aliexpress.com/item/…/32787880006.html?algo_exp…
или лучше этот
ru.aliexpress.com/item/…/32528186106.html?algo_exp…
? - Как я понял на плате установлены драйвера для двигателей drv8313, подойдут ли они к выше указанным?
двигатели разные …в 6208 зубов на статоре в 2 раза больше соответственно точность/плавность выше … но для компенсации очень быстрых рывков может не хватить скорости при малом напряжении питания. для ЯВ обычно не критично …
5208 тоже бывают с разным количеством полюсов …
контроллеры по ссылкам отличаются наличием корпуса и формой печатной платы сенсоры …
drv8313 ИМХО наилучший вариант драйвера мотора из используемых в подвесостроении … моторы ваших размеров тянут без проблем …
Cпасибо! В 6208 зубов больше и цена в 2 с лишнем раза выше… если для Yaw не критично то можно установить 6324? или такой же 5208? Не хочется переплачивать…сделать оптимально…
- Два нижних мотора 5208
у меня такие, тянут вроде, но тут от качества моторов ещё зависит в моих такое чувство что китайцы пережали подшипники, разобрать неполучается, ось на что-то приклеили… а так и 6D ставил неспешно снимая работает 😃
- Верхний 6324 ru.aliexpress.com/item/FTBO-...999.269.vzXlWE
это мотор 5208, китайцы врут и пишут его внешние габариты, а не размеры статора
или лучше 6208 ru.aliexpress.com/item/iPowe...999.272.vzXlWE
вот тут всё честно, себе на замену заказал 6212 на яв, покажете потом что у вас выйдет 😃
Ребята подскажите в чем разница контролеров с одним датчиком или с двумя, для чего два?
например это
ru.aliexpress.com/item/…/32351230646.html
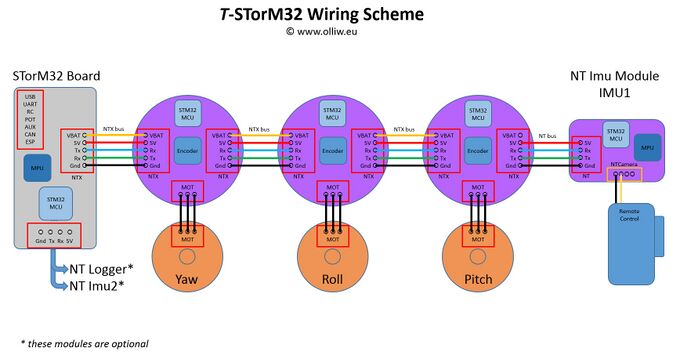
по второму датчику определяется взаиморасположение осей … без этого будут проблемы на больших углах отклонений … второй датчик обычно стоит на плате контроллера … первый (основной) должен быть на камере …
при использовании энкодеров (T-Storm32) второй датчик не используется … совсем …
UPD: на том что по ссылке три … третий на самой плате контроллера … работать будут одновременно только два …
Спасибо, по датчикам понял…, но возникают еще вопросы… вы уш извиняйте я еше не силен в этом… Если взять контролер с двумя датчиками - это лучше, чем с одним. Но непонятно на плате контролера, в моем случае (Storm32 КУП 32bit 3 оси Бесщеточный Камера Gimbal контроллер v1.31 drv8313 с 2 Датчики) энкодеры отдельно ставятся?
В моем случае к контролеру моторы подключаются напрямую к драйверам drv8313, и энкодеры не используются…? В этом случае лучше контролер с двумя датчиками… Прав ли я?
Пока писал вы уж отредактировали … А для чего тогда два выносных если на плате есть еще один (третий)?
Пока писал вы уж отредактировали … А для чего тогда два выносных если на плате есть еще один (третий)?
Если основная плата стоит сверху всей констркции (или в любом другом положении но за пределами моторов) то используется вторым тот датчик что на ней, а если вы основную плату крепите гдето по “середине” на одном из вращающихся рычагов, то второй проводной датчик выносится за пределы подвижних частей, крепится к ручкам и т. д.
А энкодеры, как я понял, к нашей версии платы неприменимы совсем 😦 надо другую 😃
да в вашем случае энкодеры не используются … чтобы их использовать нужны еще ТРИ платы T-storm32 motor с энкодерами и один NT IMU …
на моторных платах стоят свои DRV8313 , и те что на плате контроллера не используются …
под эту топологию разработана отдельнаая плата v3.3m , там нет лишних драйверов моторов и она в 2 раза меньше …
третий сенсор нужен если например плата контроллера стоит до оси яв а сенсор нужен после яв или наоборот (есть нюансы в работе) …
Если основная плата стоит сверху всей констркции (или в любом другом положении но за пределами моторов) то используется вторым тот датчик что на ней, а если вы основную плату крепите гдето по “середине” на одном из вращающихся рычагов, то второй проводной датчик выносится за пределы подвижних частей, крепится к ручкам и т. д.
А энкодеры, как я понял, к нашей версии платы неприменимы совсем 😦 надо другую 😃
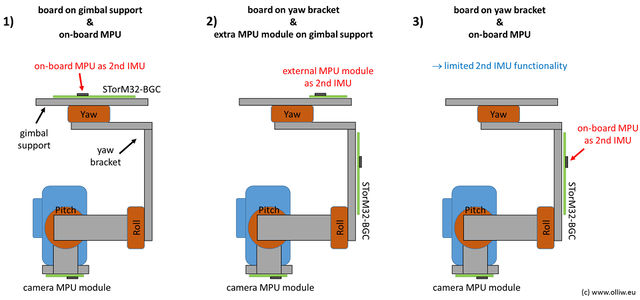
В моем варианте это третий на картинке… Контролер и батарею предполагается разместить в задней части подвеса. или все лучше расположить в верхней части… ? Если в верхней части (рис. вариант1) располагать - то второго датчика, определяющий взаиморасположение осей, и не нужно. он есть на плате контролера…
Если в задней части (рис. вариант3) то лучше располагать второй датчик в верхней части (рис. вариант2). Тогда вопрос при настройке контролера возможен выбор использования второго датчика ( на плате контролера или внешний)?
Почему выбор второго варианта на рисунке… Т.к. в этой части можно расположить контролер и батарею. Они объемные. В верхней части неудобства при , если располагать на "ручках, то они иногда предполагается будут сниматься…соответственно куда будут деваться контролер и батареи…Ну это в моей конструкции…может у кого и по другому.
Я правильно мыслю???
при настройке контролера возможен выбор использования второго датчика ( на плате контролера или внешний)?
возможен …
есть еще один нюанс …
эти контроллеры идут со старыми внешними сенсорами на шине I2C …
основной недостаток - ошибки на шине из за наводок от моторов … когда моторы маленькие проблем нет … а вот когда большие , тут приходится шаманить с прокладкой проводов и ферритовыми колечками … и часто решить проблему до конца не получается … второй выносной сенсор на той-же шине только усугубляет проблему …
для кардинального решения проблемы Олли перешел на NT шину (фактически UART) , для этого нужны NT сенсоры (со своим процессором на борту) … их приобретают отдельно , и стоят они дорого … во всех новых прошивках поддерживается только NT сенсоры … крайняя прошивка поддерживающая старый тип сенсора 0.96 (ей уже больше 2х лет) и обновлений под старый сенсор не планируется …