Вопросы по iNav

Где правда?
компас можно и отдельно от GPS поставить 😃
Енто мы в курсе. Спасибо.
Айнав - GPS c компасом и все навигационные режимы с удержаниями и возвратом домой. Без компаса на айнаве это работать не будет.
Вообще не понимаю зачем коптеру компас. Можно прекрасно обойтись без него. GPS даёт позицию, а при движении даёт направление. Дальше используем это направление для калибровки инерциальной системы навигации и постоянно корректируем при полётах достаточных для определения направления. Возврат домой то же просто - летим вперед, получаем вектор направления движения, сравниваем с напралением на дом, корректируем пока не совпадёт.
Вообще не понимаю зачем коптеру компас. Можно прекрасно обойтись без него.
Зачем обходиться без компаса, если он есть и поддерживается в INav? За счёт него коптер понимает как он сориентирован в пространстве и сразу летит куда надо, а не шарахается по небу в разные стороны в надежде нащупать вектор. Вы описали игру “холодно-горячо”, в неë же играет коптер в бетафлае, причём в предыдущих релизах коптер часто проигрывал. В BF RC6 говорят что-то поправили чтобы коптер летел всë же в сторону точки взлëта и убивался бы поближе к пилоту…
Коллеги, всех приветствую, буквально только что собрал первый коптер на inav. Собирал по видео Юлиана Лучший квадрокоптер-долголет для начинающего! Как собрать, настроить и сделать первый полет! Вчера попробовал облетать, при переключении в режим удержания высоты дает конкретный крен по роллу влево. Кто-нибудь сталкивался с подобным поведением? Это как-то можно выправить? Или только микшировать с режимом Angle? Плюс хотел уточнить касательно триммирования стиками: попробовал, но результата особо не заметил. Это может зависеть от аппы? У меня Турнига 9xr с ппм выходом, поэтому прошивка inav не выше третьей.
летим вперед, получаем вектор направления движения, сравниваем с напралением на дом, корректируем пока не совпадёт.
На малых скоростях да в условиях переменного ветра ваш “вектор движения” будет напоминать “как бык посс&л”…
Ребята подскажите, в случае с самолетом/планером в Inav есть полетные режимы и есть навигационные. Допустим я лечу в Angle режиме и хочу в навигационном включить Poshold (летать вокруг одной позиции). То как правильно, нужно чтобы был включен и Angle + Poshold, или Angle можно отключить и включить Poshold? Не пойму просто они исключают друг друга или дополняют, объясните пж.
Не пойму просто они исключают друг друга или дополняют
Включают друг друга. То есть, если для обеспечения логики/функциональности POS HOLD необходимы другая функциональность, то они будут активированы самой INAV логикой. Вы не можете отключить явно эту функциональность.
Но если вы отключите тот же POS HOLD, то вернетесь в то состояние, которое вы указали явно. То есть если у вас был ACRO, то будет ACRO. Если за время включеной функциональности POS HOLD вы указали уровнем каналов что-то еще, например удержание курса, то будет именно удержание курса, и то что необходимо для удержания курса.
И да, режимы имеют приоритет.
Вообще не понимаю зачем коптеру компас. Можно прекрасно обойтись без него. GPS даёт позицию, а при движении даёт направление.
Это довольно хорошо работает для самолетов. Фигня в том, что коптер не двигается линейно, он в норме крутится. А ошибка гироскопа довольно велика. Итого вычисление ориентации превращается в довольно сложную математическую лотерею, что и демонстрирует логика в Betaflight. У меня коптер давеча после нырка вниз, по rescue (я хотел так сориентироваться) полетел в другую от меня сторону, вообще берега попутал =)
Короче не судьба мне с iNav побаловаться. В 2020 пробовал версию 2.4.0 - конфигуратор понравился, а как летает не очень. Переключился на ArduCopter. В прошлом году не летал. В этом году решил полетать опять, обновил ArduCopter, разок подлетнул и решил опять iNav попробовать. Залил нормально, выборочно старый конфиг залил, зашёл в настройку радио, а там ничего не происходит: двигаешь стики, а в ответ тишина. Оказалось режим PPM выпилили как “устаревший”. “*Фигня! *- подумал я - выпилили и хрен с ним!” - приёмник FS-iA6B умеет IBUS/SBUS, ArduCopter без проблем работал в любом из режимов(PPM/IBUS/SBUS, пробовал что бы получить более 8 каналов). Начал настраивать а оно нихрена не работает! Что я делал: Выключил все UART, отсоединил телеметрию и GPS. Включал одному порту RX, шел в настройки аппаратуры, приёмник ставил Serial, протокол IBUS, инверсию OFF и пробовал. Далее инверсию ON и пробовал. Далее протокол SBUS(и в аппаратуре выставлял соответственно), инверсию OFF и пробовал. Далее инверсию ON и пробовал. Потом переходил к следующему порту. Не заработало ни в одной из комбинаций.
Полётник OmniBus F4 Pro v2:
Board выбирал OMNIBUSF4PRO, версию 4.1.0.
Что делать, куда копать?
P.S. Arducopter не нравится тем, что постоянно пишет статистику количества включений и время проведенного в воздухе. EEPROM ни у микроконтроллера, ни на плате нет - значит пишет он это во внутреннюю Flash. А у неё лимит 10 тыс. стираний, потом плату можно выкинуть(или переваивать микроконтроллер).
Что делать, куда копать?
Убедитесь что у вас именно тот омнибус, который на картинке. Есть похожие, но у них надо паять перемычку PPM/SBUS
Далее, нет смысла дергать все порты и переключать инверсии. Просто сделайте по инструкции:
Как подключить приемник Flysky по IBUS к Omnibus F4 V2 Pro:
- Обновить прошивку ( в 3.01 подключить не получится)
- Подключить приемник к GND, 5V, RX1 порта J5
- В настройках портов включить Serial RX для UART1. Save and Reboot
- Configuration - Receiver выбрать “Serial based receiver”
- Provider “IBUS”. Save and reboot.
Если не работает, значит что-то не так с контроллером.
А у неё лимит 10 тыс. стираний, потом плату можно выкинуть(или переваивать микроконтроллер).
а вы предполагаете совершить 10 тыс. вылетов на одном коптере?
Есть похожие, но у них надо паять перемычку PPM/SBUS
Вот например
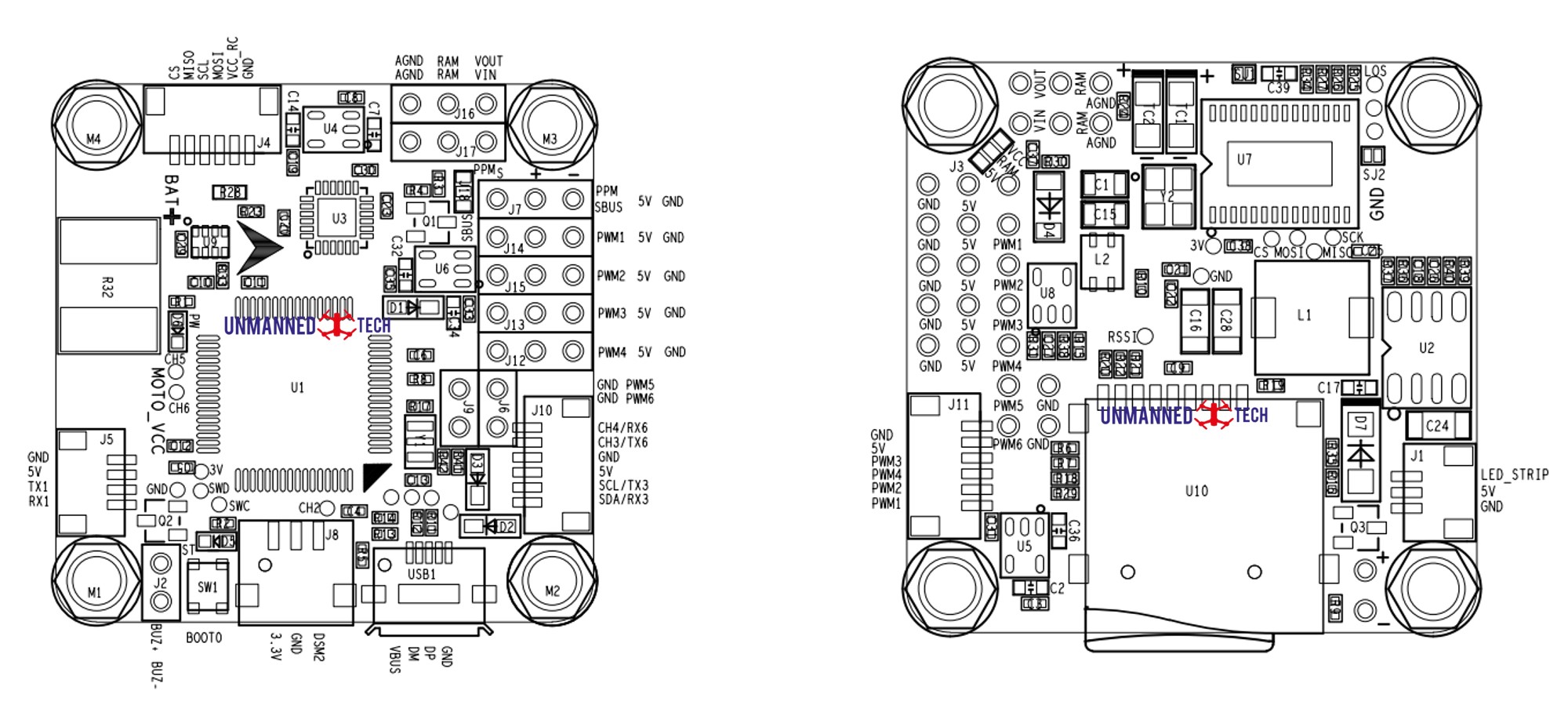
Убедитесь что у вас именно тот омнибус, который на картинке.
100% - это фото моего омнибуса сделанное после получения на почте.
- Подключить приемник к GND, 5V, RX1 порта J5
Это будет следующий этап. Повезло что проводок уже есть - заказывал набор “6PCS 4p 6p 8p Wire Cable for Omnibus F4 silicon JST SH1.0 15cm”, там как раз нужный проводок со всеми разъёмами. Если заработает могу один проводок вынуть, сплести косичку и переставить контакты с одиночных JST на тройной. Интересно, а можно использовать RX для приёмника, а TX для телеметрии на одном порту одновременно? Вообще глянул на схему омнибуса - какие-то криводелы делали. Servo_out3 это USART2_RX. Надо было его использовать для приёмника, а для выхода на серво использовать один из пинов которые заведены на тестпоинты CH2, CH5 или CH6. Ну и перемычку SBUS-IBUS стоило бы сделать что бы сигнал с приёмника можно было пускать или через инвертор, или напрямую.
а вы предполагаете совершить 10 тыс. вылетов на одном коптере?
Ну кто его знает… может они там каждую секунду данные обновляют что бы время полёта записать. Хотя это конечно вряд ли… в любом случае это не правильный подход. Не по феншую как-то.
- Подключить приемник к GND, 5V, RX1 порта J5
Попробовал - работает. И телеметрию нельзя одновременно включить с приёмником для одного порта, так что работать в режиме “телеметрия - на землю, управление аппаратурой - с земли” работать не будет. Осталось теперь в FlySky i6 добавить переключатель SwE и поставить его в не очень удобное место(поближе к антенне думаю) - арм/дизарм стиками выпилили уже давно и у меня была ситуация когда по ошибке щёлкнул выключателем арма… благо коптер был не где-то сильно высоко и далеко а висел возле меня в паре метров над землёй. Но приятного всё равно было мало.
А как сделать что-бы была возможность останавливать двигатель в полете? Галочку на стоп-мотор поставил. Или для этого нужен специальный регулятор? Это касается планера, когда на определенной высоте делаю газ в 0 лопасти по идее должны сложиться и вращение пропеллера прекратиться. А у меня такое вращение иногда продолжается, а иногда лопасти складываются и всё ок. Вот не пойму это надо спец регуль и мотор или как?
У регуля поставить стоп мотор. Brake on.
О а каким софтом это делать? У меня вот такой регулятор alnado.ru/…/beskollektornyj-regulyator-oborotov-40…
Теперь новая напасть - не работает OSD, просто чистая картинка с камеры. На ArduCopter до перепрошивка на iNav работало. OSD настроено, через CLI сделал все экраны одинаковыми(задал одинаковые параметры для всех профайлов и проверил в конфигураторе), залил шрифт через конфигуратор, камера выбрана вроде правильно(NTSC)… куда копать теперь?
В конфигураторе во вкладке Configurations справа в разделе Other Features есть галочка OSD. Включено?
камера выбрана вроде правильно(NTSC)
Это если камера только NTSC понимает. Сейчас они практически все универсальные. Попробуйте авто или PAL. В PAL больше строк влезает, кстати.