Вопросы по iNav

Короче не судьба мне с iNav побаловаться. В 2020 пробовал версию 2.4.0 - конфигуратор понравился, а как летает не очень. Переключился на ArduCopter. В прошлом году не летал. В этом году решил полетать опять, обновил ArduCopter, разок подлетнул и решил опять iNav попробовать. Залил нормально, выборочно старый конфиг залил, зашёл в настройку радио, а там ничего не происходит: двигаешь стики, а в ответ тишина. Оказалось режим PPM выпилили как “устаревший”. “*Фигня! *- подумал я - выпилили и хрен с ним!” - приёмник FS-iA6B умеет IBUS/SBUS, ArduCopter без проблем работал в любом из режимов(PPM/IBUS/SBUS, пробовал что бы получить более 8 каналов). Начал настраивать а оно нихрена не работает! Что я делал: Выключил все UART, отсоединил телеметрию и GPS. Включал одному порту RX, шел в настройки аппаратуры, приёмник ставил Serial, протокол IBUS, инверсию OFF и пробовал. Далее инверсию ON и пробовал. Далее протокол SBUS(и в аппаратуре выставлял соответственно), инверсию OFF и пробовал. Далее инверсию ON и пробовал. Потом переходил к следующему порту. Не заработало ни в одной из комбинаций.
Полётник OmniBus F4 Pro v2:
Board выбирал OMNIBUSF4PRO, версию 4.1.0.
Что делать, куда копать?
P.S. Arducopter не нравится тем, что постоянно пишет статистику количества включений и время проведенного в воздухе. EEPROM ни у микроконтроллера, ни на плате нет - значит пишет он это во внутреннюю Flash. А у неё лимит 10 тыс. стираний, потом плату можно выкинуть(или переваивать микроконтроллер).
Что делать, куда копать?
Убедитесь что у вас именно тот омнибус, который на картинке. Есть похожие, но у них надо паять перемычку PPM/SBUS
Далее, нет смысла дергать все порты и переключать инверсии. Просто сделайте по инструкции:
Как подключить приемник Flysky по IBUS к Omnibus F4 V2 Pro:
- Обновить прошивку ( в 3.01 подключить не получится)
- Подключить приемник к GND, 5V, RX1 порта J5
- В настройках портов включить Serial RX для UART1. Save and Reboot
- Configuration - Receiver выбрать “Serial based receiver”
- Provider “IBUS”. Save and reboot.
Если не работает, значит что-то не так с контроллером.
А у неё лимит 10 тыс. стираний, потом плату можно выкинуть(или переваивать микроконтроллер).
а вы предполагаете совершить 10 тыс. вылетов на одном коптере?
Есть похожие, но у них надо паять перемычку PPM/SBUS
Вот например
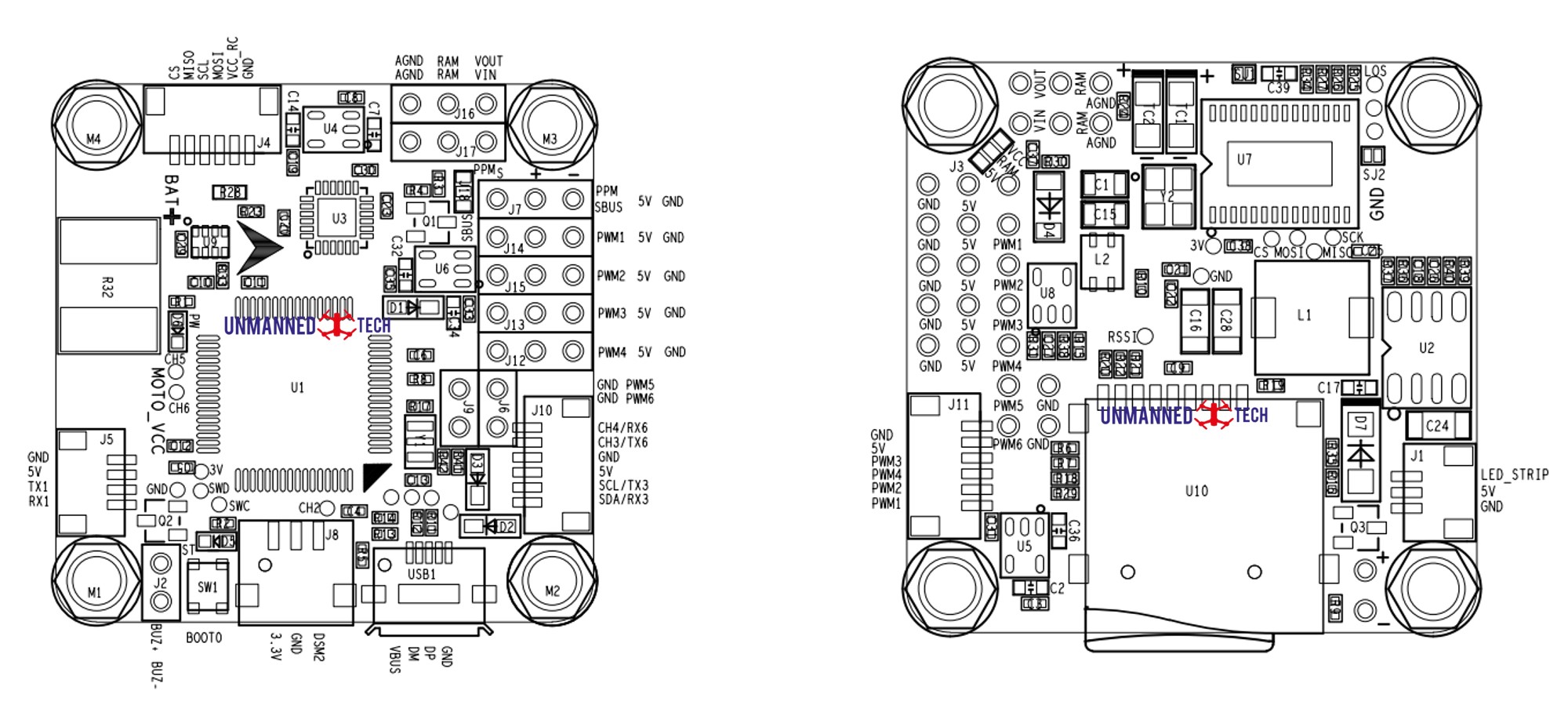
Убедитесь что у вас именно тот омнибус, который на картинке.
100% - это фото моего омнибуса сделанное после получения на почте.
- Подключить приемник к GND, 5V, RX1 порта J5
Это будет следующий этап. Повезло что проводок уже есть - заказывал набор “6PCS 4p 6p 8p Wire Cable for Omnibus F4 silicon JST SH1.0 15cm”, там как раз нужный проводок со всеми разъёмами. Если заработает могу один проводок вынуть, сплести косичку и переставить контакты с одиночных JST на тройной. Интересно, а можно использовать RX для приёмника, а TX для телеметрии на одном порту одновременно? Вообще глянул на схему омнибуса - какие-то криводелы делали. Servo_out3 это USART2_RX. Надо было его использовать для приёмника, а для выхода на серво использовать один из пинов которые заведены на тестпоинты CH2, CH5 или CH6. Ну и перемычку SBUS-IBUS стоило бы сделать что бы сигнал с приёмника можно было пускать или через инвертор, или напрямую.
а вы предполагаете совершить 10 тыс. вылетов на одном коптере?
Ну кто его знает… может они там каждую секунду данные обновляют что бы время полёта записать. Хотя это конечно вряд ли… в любом случае это не правильный подход. Не по феншую как-то.
- Подключить приемник к GND, 5V, RX1 порта J5
Попробовал - работает. И телеметрию нельзя одновременно включить с приёмником для одного порта, так что работать в режиме “телеметрия - на землю, управление аппаратурой - с земли” работать не будет. Осталось теперь в FlySky i6 добавить переключатель SwE и поставить его в не очень удобное место(поближе к антенне думаю) - арм/дизарм стиками выпилили уже давно и у меня была ситуация когда по ошибке щёлкнул выключателем арма… благо коптер был не где-то сильно высоко и далеко а висел возле меня в паре метров над землёй. Но приятного всё равно было мало.
А как сделать что-бы была возможность останавливать двигатель в полете? Галочку на стоп-мотор поставил. Или для этого нужен специальный регулятор? Это касается планера, когда на определенной высоте делаю газ в 0 лопасти по идее должны сложиться и вращение пропеллера прекратиться. А у меня такое вращение иногда продолжается, а иногда лопасти складываются и всё ок. Вот не пойму это надо спец регуль и мотор или как?
У регуля поставить стоп мотор. Brake on.
О а каким софтом это делать? У меня вот такой регулятор alnado.ru/…/beskollektornyj-regulyator-oborotov-40…
Теперь новая напасть - не работает OSD, просто чистая картинка с камеры. На ArduCopter до перепрошивка на iNav работало. OSD настроено, через CLI сделал все экраны одинаковыми(задал одинаковые параметры для всех профайлов и проверил в конфигураторе), залил шрифт через конфигуратор, камера выбрана вроде правильно(NTSC)… куда копать теперь?
В конфигураторе во вкладке Configurations справа в разделе Other Features есть галочка OSD. Включено?
камера выбрана вроде правильно(NTSC)
Это если камера только NTSC понимает. Сейчас они практически все универсальные. Попробуйте авто или PAL. В PAL больше строк влезает, кстати.
в разделе Other Features есть галочка OSD. Включено?
Да. Фоны залил ещё раз, уже с подключеным аккумулятором - не помогло.
не работает OSD, просто чистая картинка с камеры
куда припаяны земля камеры и земля передатчика?
Камера подключена в разъем камеры на полетнике тремя проводами: земля, питание и видео. Передатчик(Eachine TX805) подключен в разъем передатчика тоже тремя проводами. Так же отдельно подключено питание передатчика прямо к батарее, потому что перемычка на полетнике запаяна в положение 5V т.к. камера больше не держит.
Короче работает все. Думал камера настроена на NTSC, а она PAL. Камера JINJIEAN MINI B19 к ней в комплекто выносной джойстик для настройки шёл:

Вчера настраивал ПИДы, вроде летать стало более-менее(правда значения получились P100 I35 D100), то ли ветер подул, то ли что, но полетел костер на меня, крашеулся в метре от меня в трамплин, упал вверхтормашками, в какой-то момент этих событий я щёлкнул переключателем АРМа и ничего не произошло - подхожу, а он крутит винтами слабо. Начинаю брать, а он начинает раскручивать винты. То ли файлсейф сработал то ли что… но даже если так, почему сам не задизармился? Детская игрушка(маленький коллекторный квад) дизармится упав на пол, АрдуКоптер ещё на АтМеге залетев на дерево задизармился, а айНав не может?
а вы предполагаете совершить 10 тыс. вылетов на одном коптере?
Там все ещё хуже - пишется не только количество включений, но и время во включенном состоянии. Вроде пишется каждые 30 секунд. При 10 тыс. перезаписей, достаточно подержать контроллер включенным 83 часа что бы убить полётник. Если разрабы не добавят отключение этой хрени, придется лезть в код и компилировать свою версию. Потому что с iNav, пока, завязываю.
Какие-то странные пиды получились. P/I очень мало Какой размер у вас?
Это потому, что даже сложенный проп иногда начинает раскручиваться. И да, галочка в INAV != настройка регулятора. Эта галочка заставляет INAV не посылать сигнал газа в регулятор, но это не значит, что регулятор будет тормозить мотор! Для торможения у регулей предусмотрен специальный режим, который нужно отдельно настроить. На некоторых регулях есть возможность установить и силу удержания.
АрдуКоптер ещё на АтМеге залетев на дерево задизармился, а айНав не может?
Ну тут вы предлагаете ситуацию, в которой надо гадать. А всего-то надо было посмотреть на OSD, что за статус там выводится – failsafe, emergency landing или что?
Какое поведение настроено на failsafe? Какой метод failsafe выставлен в приемнике? Может, коптер решил сделать экстренную посадку, а его просто снесло ветром? Может, приемник потерял связь, но продолжал слать нормальный сигнал? Кто ж его знает.
INAV 5 релиз кандидат 1. Сам INAV и конфигуратор.
Опять новый мажорный номер версии, поскольку изменений много. Из вещей которые ждал - конфигуратор магнитометра.