По идее тут надо ползти в настройки пульта. Что там показывает? Обычно айнав что видит с приемника, то и показывает.
Нужно настроить RSSI в канал, но у меня при потери связи во вкладке ПРИЕМНИКИ все каналы двигаются примерно от 1800 до 1500 и один только арм от 1900 до 1100, подскажите как настроить что бы свободный канал при потери связи двигался во всем диапазоне
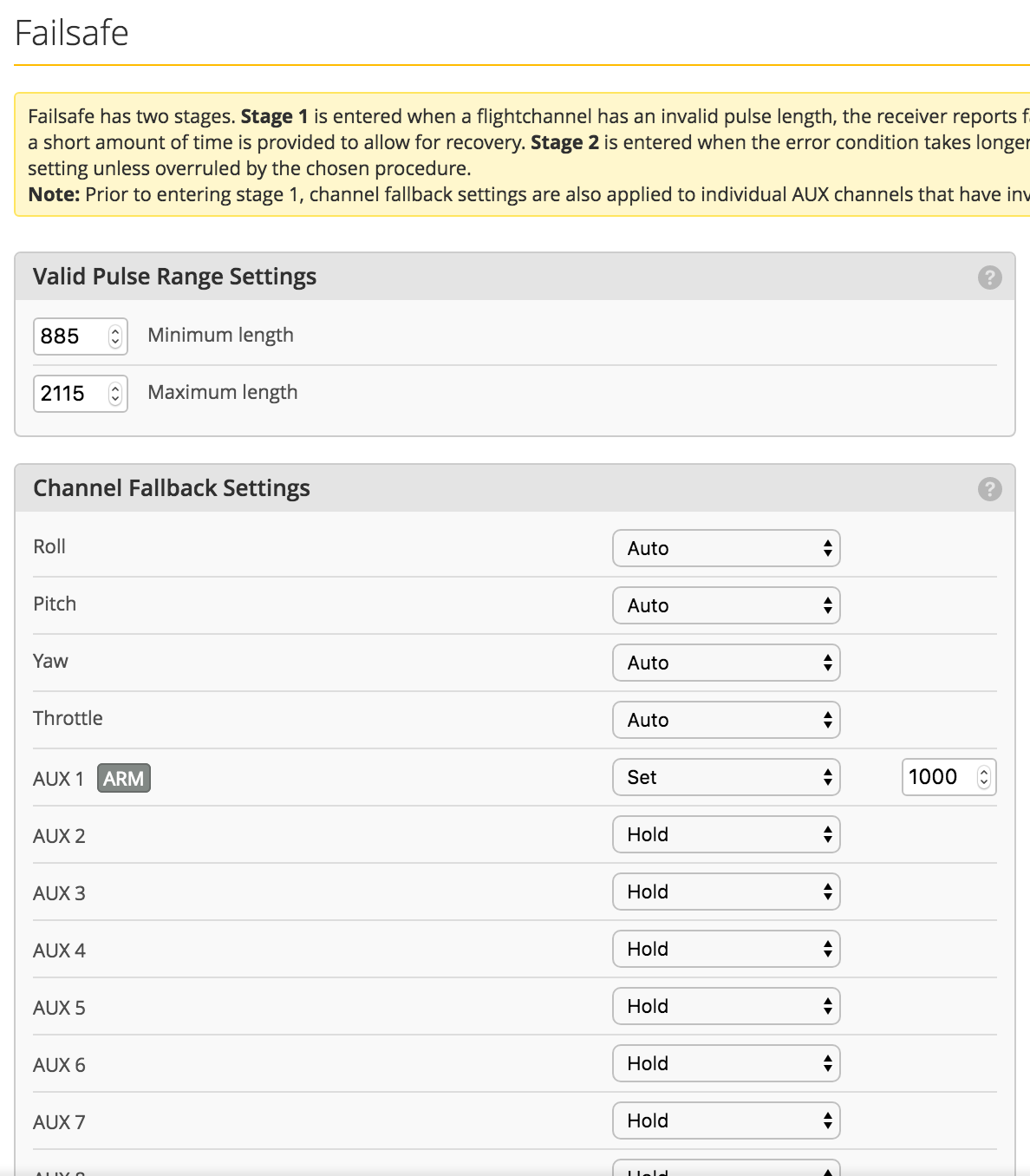
думаю это можно настроить в вкладке failsafe. на нужном канале выбрать set и установить нужное значение. Настройка failsafe доступна в expert mode (включается в верхнем правом углу конфигуратора)
Правда не понятно зачем это надо. Настройка отображения RSSI по другому делается. В зависимости от типа радиоуправления.
ребят помогите мне настроить RSSI. Пульт футаба, передача по С бус, использую ретранслятор, выставляю в канал RSSI. настраиваю set rssi_offset и set rssi_scale, при выключении питания ретранслятора 0, при включении 99, но при ухудшении связи так и остается 99.
по этому мануалу и настраивал, вроде все понятно и просто ,ан нет)
Подскажите, есть ли сейчас дешёвые (< 3000 руб) полётники 20*20 F4-F7, которые шьются инавом? По типу бывших JHEMCU NOXE V1. Сейчас продаётся версия V3, которая в инав не умеет. Какие-то AOKODA есть, но с ними непонятно, то ли поддерживаются, то ли нет. Очень интересно было бы попробовать BAYCK Dolphin, но он тоже не поддерживается вроде. Короче, как-то грустно с поддержкой у инава.
Подскажите, есть ли сейчас дешёвые (< 3000 руб) полётники