Вопросы по iNav

Нет, он стабилизируется в горизонт и будет дрейфовать по ветру пока не поймает GPS снова.
Теоретически например квадр может лететь по компасу с небольшим питчем вперед, без GPS , ветром его будет сдувать но он питаться лететь туда куда будет показывать компас…
При сильном боковом ветре он теоретически не сможет приблизительно прилететь к дому…
Имея координаты точки старта и последней точки, где ловился GPS, можно вычислить азимут для возврата домой. Но это не учитывает снос ветром. Т.е. он повернется изначально носом на дом, но при боковом ветре может прилично улететь в сторону. Опять же, если сигнал так и не возобновился, когда принимать решение об аварийной посадке? Здесь снова вопрос сноса ветром становится основным. И еще не понятно, что хуже, приземлится прямо там где пропал сигнал GPS или где-то недалеко от вас, но кому-то на голову. Но если предположить, что есть видео и управление, то оно скорее всего возобновиться когда аппарат будет находится ближе к вам. Т.е. лучше лететь домой. 😃
Имея координаты точки старта и последней точки, где ловился GPS, можно вычислить азимут для возврата домой. Но это не учитывает снос ветром. Т.е. он повернется изначально носом на дом, но при боковом ветре может прилично улететь в сторону. Опять же, если сигнал так и не возобновился, когда принимать решение об аварийной посадке? Здесь снова вопрос сноса ветром становится основным. И еще не понятно, что хуже, приземлится прямо там где пропал сигнал GPS или где-то недалеко от вас, но кому-то на голову. Но если предположить, что есть видео и управление, то оно скорее всего возобновиться когда аппарат будет находится ближе к вам. Т.е. лучше лететь домой.
Сильный боковой ветер квадрик может регистрировать своими датчиками например акселерометром, и делать поправку, но это нужно в прошивке кодить .
Хотя любой квадр и так сопротивляеться с ветром в режиме стабилизации. Нужно пробовать на практике.
Только для теста нужно придумать бортовую глушилку GPS ))
он повернется изначально носом на дом
Уж лучше пусть задом летит, хоть издали меньше проблем с управлением точкой в небе
Уж лучше пусть задом летит, хоть издали меньше проблем с управлением точкой в небе
Согласен. Кто ближе к разработчикам iNav, попросите пожалуйста пускай сделают вариант возврата вообще без модуля GPS, или с перебоями сигнала GPS, приблизительно так как это сделано в квадрике Eachine H8, Спасибо.
А насчет мавлинка - возможно сделаю минималистичный набор двунаправленной телеметрии для управления маршрутом полета, без полноценного доступа к параметрам, но это весьма и весьма отдаленная перспектива. Сейчас меня больше заботят мелкие улучшения полета по точкам, terrain-following по сонару, автопосадка и отладка автовозврата по фейлсейфу.
так у мавлинка WP протокол в отдельную группу вынесен.
автопосадка и автовозврат - это самолетная часть кода?
Кто ближе к разработчикам iNav, попросите пожалуйста пускай сделают вариант возврата вообще без модуля GPS
Куда уж ближе 😁
Вряд ли буду делать такой вариант. Headless-режим как раз и позволит вернуться куда-нибудь в сторону дома, не автоматически, но все же.
При длительном пропадании GPS самое безопасное поведение - приземлиться, неконтролируемый полет куда-то с посадкой где-то только затруднит поиски аппарата, и, возможно, создаст бОльший риск чем посадка прямо в месте потери GPS-а.
просто интересно как будет себя вести квадр на прошивке iNav, при отсутствии сигнала GPS
Повисит некоторое время (по умолчанию 5 секунд) и сядет если сигнала все еще не будет.
Сильный боковой ветер квадрик может регистрировать своими датчиками например акселерометром
Движения относительно воздуха не будет, только вместе с воздухом с более-менее постоянной скоростью, аксель тут ничего не зарегистрирует.
так у мавлинка WP протокол в отдельную группу вынесен.
Загвоздка в двунаправленной телеметрии. У Клинфлайта (соответственно и у iNav) по умолчанию она только от квадра к земле работает.
автопосадка и автовозврат - это самолетная часть кода?
Коптерная. Автовозврат работает и на самолете, посадки самолета пока нет.
jShadow , есть ли калибровка компаса без компьютера?
И как посмотреть, есть ли наводки на компас от работающих двигателей? Все думаю, что лучше выпаивать компас или подальше отодвинуть весь контроллер. Отрезать дорожку питания я не смог. Очень плотный монтаж и дорожка не видна.
Загвоздка в двунаправленной телеметрии. У Клинфлайта (соответственно и у iNav) по умолчанию она только от квадра к земле работает.
А как же тогда работает возможность настройки PIDов через меню MinimOSD?
jShadow , есть ли калибровка компаса без компьютера?
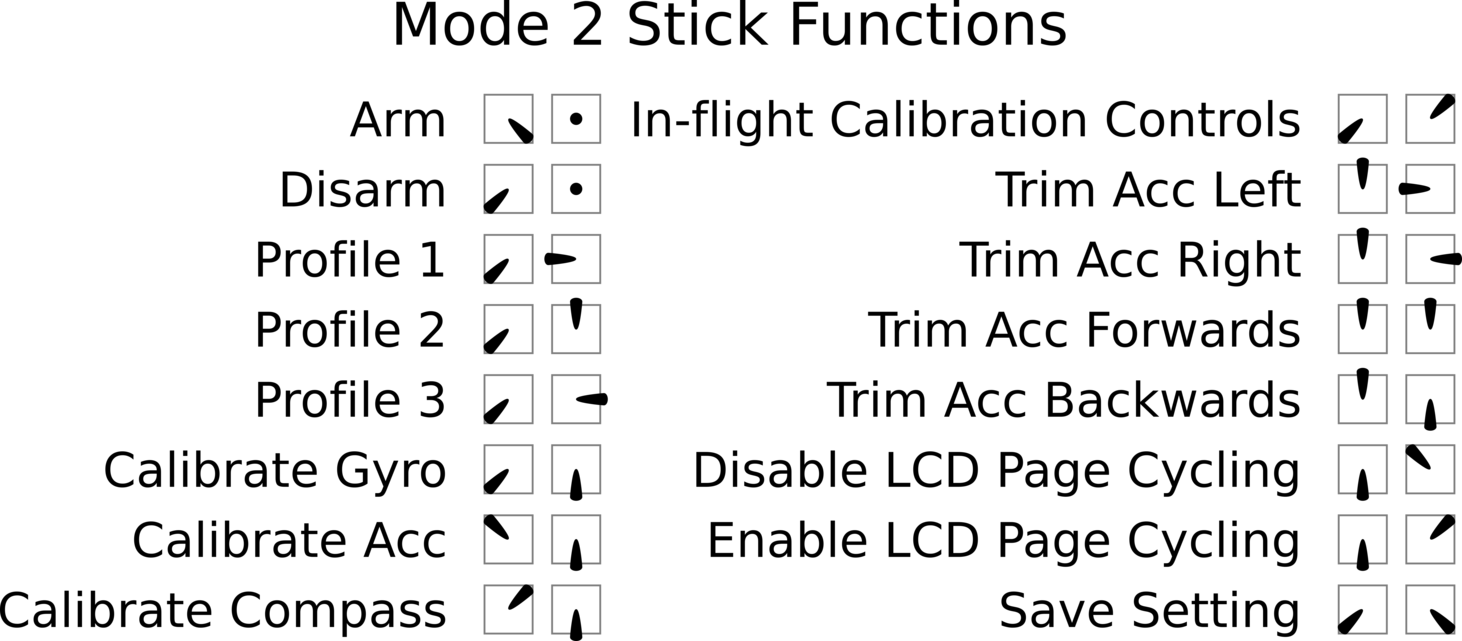
Работают комбинации стиков, как в Cleanflight
И как посмотреть, есть ли наводки на компас от работающих двигателей?
Без компьютера и без OSD никак. С компьютером - привязать квадр, чтобы не улетел, дать газ и последить за показаниями “Heading”. Если меняются больше чем на 2-3 градуса - проблема есть.
Еще нужно удостовериться, что при ориентировании квадра носом на север, восток, юг и запад показания компаса 0, 90, 180 и 270 соответственно и не меняются сильно при кренах.
Все думаю, что лучше выпаивать компас или подальше отодвинуть весь контроллер.
Какого размера квадр?
А как же тогда работает возможность настройки PIDов через меню MinimOSD?
MSP - родной протокол конфигурирования, это не телеметрия. MWOSD не слушает телеметрию, она опрашивает контроллер.
Все думаю, что лучше выпаивать компас или подальше отодвинуть весь контроллер. Отрезать дорожку питания я не смог. Очень плотный монтаж и дорожка не видна.
Главное это не подключать к плате контролера минусовые кабеля от регулятора, подключать только сигнальный.
У меня в процессе сборки мини квадр с компасом, моторы на расстоянии 12 см от компаса, но при этом есть незначительные изменения в показаниях компаса когда вручную медленно кручу один двигатель, на остальных трех моторах такого нет, когда моторы работают то не особо влияют на компас, так как обороты большие…
Позволю себе спросить. Подскажите, в iNav реализована поддержка светодиодной ленты? Не могу настроить, посмотрел CLI, а там вообще про ленту не упоминается.
Подскажите, в iNav реализована поддержка светодиодной ленты?
Только на платах с процессорами F3 (SPF3, RMDO). В NAZE не хватает памяти одновременно на навигацию и светодиодную ленту.
Главное это не подключать к плате контролера минусовые кабеля от регулятора, подключать только сигнальный.
Подскажите, о каком ПК идёт речь? А то сам заканчиваю сборку квадрика на Naze32 10DOF c таким GPS. Уже законектил землю от всех регулей к ПК. Надо ли её удалять?
Уже законектил землю от всех регулей к ПК
На общую минусовую шину повесьте. Без земли на регулях могут быть проблемы на малых оборотах - сигнал идёт относительно одной земли, а на регуле просадка в момент включения обмоток и уже получается другая земля. А так сигнальный минус идёт и ни на одном регуле я не видел, чтобы он прям сразу к силовому минусу был припаян - везде через тонкий перешеек, который становится резистором в момент просадки и земля на этом тонком проводе не так сильно уезжает - сигнал лучше читается.
На общую минусовую шину повесьте.
Маленько подтупливаю. Общая схема проводки такая:
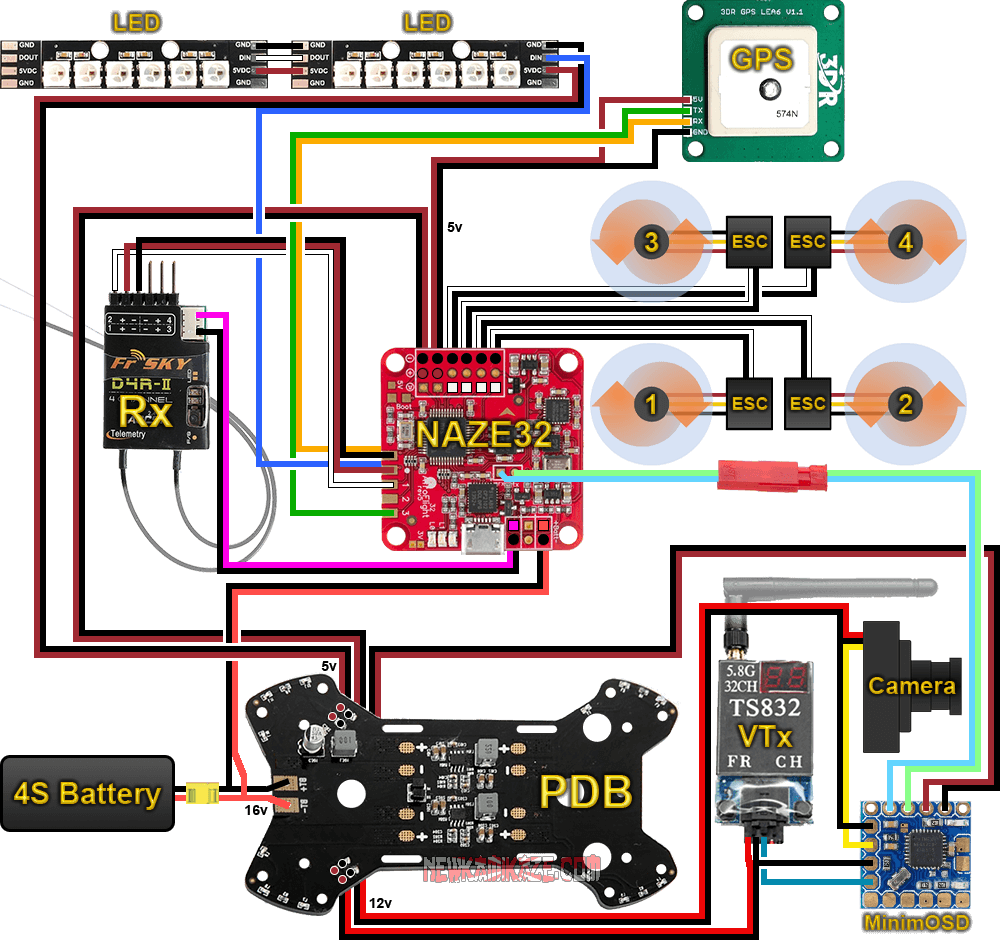
Куда конкретно замыкать землю регулей? И как быть с землёй, идущей на ПК и от ПК к GPS?
Куда конкретно замыкать землю регулей
Где на pdb минусы, а к gps только от контроллера.
Уже законектил землю от всех регулей к ПК. Надо ли её удалять?
Нет, не нужно, оставьте как есть. Lokanaft прав, при запуске двигателей так выше стабильность.
На общую минусовую шину повесьте.
Нет, не нужно, оставьте как есть.
Умеете внести ясность. Так в итоге убирать “землю” с ПК или нет? А то я морально уже приготовился весь квадрик разбирать.
Умеете внести ясность.
Всегда желательно иметь отдельную “сигнальную” землю. Я всегда оставляю землю с регулей на ПК, а вот +5В для питания ПК обычно беру с отдельного преобразователя
У меня сейчас так и есть.