Мощный 100А+ регулятор с коптерной прошивкой или альтернативная прошивка обычного?

Привет всем!
Так вышло, что сделали мощный соосный мотор 😃
Лопает он до 100А при 12S и на видео работает через YEP-120HV.
Проблема в том, что регуль этот вертолётный и ооооочень тормозной. Как его ни настраивай (есть карта и упорство, но не помогает).
Проблема номер два - мотор 30-и полюсный с низким кв. А регуль таки вертолётный 😃 и выше 3000 его не крутит, хотя мотор рассчитан на 6000.
Проблема номер три - в моторе есть датчики оборотов, температуры и всё это не обрабатывается сейчас регулем.
Из коптерных регуляторов такого тока и напряжения был найден только T-motor. Цена у них вообще не гуманная, да и проблему обработки датчиков не решает.
Тогда я стал искать альтернативные прошивки для простых регуляторов.
Нашёл проекты wii-esc и SimonK.
Первый, по всем признакам, умер. База прошивок/регуляторов не открывается, последний пост в лохматом году.
Второй живенький, судя по базе есть под Red Brick на 125 и 200А, который на базе AVR, а я их немного знаю. Но он до 7 банок…
Polaris Thunder 100A и вовсе до 6.
HobbyKing / HexTronik F3J HXT200A найти не удалось вообще :blink:
Из высоковольтных оказался только Turnigy KForce 120A HV v2, но он на силабсе 😦
Суть вопроса в следующем:
- Есть ли ещё проекты прошивок или мощных регуляторов, про которые я не знаю?
- В верном ли направлении двигаюсь? Идея в перспективе - допилить прошивку под себя, добавить управление через интерфейс, поддержку датчика оборотов (хотя у Turnigy KForce 120A HV v2 она, вроде, и так есть), температуры, чтение этих данных регулем и т.п.
Буду раз услышать рекомендации и посылы в верном направлении 😃
А что за мотор , можно немного подробностей ??? это 2 мотора в одном или мотор с редуктором ??? 100 ампер ест весь мотор или половинка ???
Мысли вслух …
задача весьма специфическая … нужен регуль одновременно высоковольтный мощный и быстрый … думаю такой готовый врятли найдете , в лучшем случае придется не только перепрошивать но и дорабатывать измерительные цепи (которыми проц отлавливает эдс свободной фазы)
что там у вас за датчик оборотов и зачем он вообще нужен ??? регуль и так может посчитать обороты если ему сказать сколько у него полюсов в моторе … обычно датчики положения ставят на моторы расчитанные на работу на низких оборотах , которым нужен большой крутящий момент , притом от фактически от нуля оборотов (автомодели т тому подобные применения) на высоких оборотах проще мониторить фазу …
думаю регуль стоит делать самим , под какую-то готовую прошивку …
в своё время был интересный проект ESC32 , там была возможность настройки регуля под конкретную пару мотор/проп пуеём прогона пары на стенде во всем диапазоне оборотов , но там помоему всё глухо … исходники были доступны для старых версий …
сейчас активно развивается BLHELI , под атмел и силабс исходники свободно лежат на гитхабе (атмелавским правда уже два года , да и быстродействия проца может не хватить под вашу скорость переключения) , есть версия 32 бит , но по доступности исходников 32бит ничего сказать не могу …
если самостоятельно делать регуль , а это может оказаться дешевле чем покупать готовый, то имеет смысл делать его на 2х платах … на первой плате контроллер , стабилизатор питания контроллера и драйверов мосфетов , интерфейсы … на второй только силовые мосфеты … так будет проще поектировать и изготавливать платы … первая плата с тонкой фольгой вторая с толстой … пример такого регуля 2N-2N от aerolab.de(сейчас недоступен) …
Мотор самодельный, 2 в одном. 100 ампер на половинку.
сейчас активно развивается BLHELI
А у них есть какой-то свой сайт? Пока вижу их исходники только в куче с саймоном.
пример такого регуля 2N-2N от aerolab.de
Да турнига так же сделана www.helifreak.com/attachment.php?attachmentid=4051…
исходники под первое и второе поколение на гитхабе github.com/bitdump/BLHeli
исходники под 32 бит они закрыли blheli32.com/some-userful-links-about-blheli_32/
у турниги неправильный стабилизатор питания , нужно делать импульсный преобразователь …
BLHeli_S SiLabs это 2-е поколение?
у турниги неправильный стабилизатор питания , нужно делать импульсный преобразователь …
Мне на внешку ничего выдавать не надо, а для МК хватит и линейного имхо…
да второе …
питать нужно не только МК но и драйверы мосфетов , поскольку мосфеты планируются мощные - входная емкость у них большая её нужно перезаряжать и с большой скоростью (чтобы потерь меньше было) и частотой (мотор то многополюсный) это сожрет существенно больше чем МК …
тоесть из максимум 50 вольт нужно получить 10-20 вольт для питание драйверов и потом из них 3,3 вольта для МК … на турниге похоже стоят аж три ступени линейного стабилизатора и греются достаточно сильно … драйвер всетаки лучше питать от импульсного стабилизатора а MK можно и от линейного …
У меня, как выяснилось, есть этот рег. Купил года 2 назад и он гадски сгорел при первом пуске. Трупик сохранил и не зря!
Вскрыл, отмыл. Вот тут фотки платки с сайта бихели и моей платы yadi.sk/d/gFBuTXOF3SQVTh
Так вот, первое: в моём транзисторы с невнятной маркировкой AF21AC, тогда как в оригинале 7164.
Далее, радиатор был тупо приклеен на скотч и медные тепловоды не доставали до алюминия т.к. были изолированы скотчем.
В итоге всё это и бомбануло.
В общем, не покупайте реги на али, ребята.
По стабилизатору - вижу 78М12 и за ней 1117-3,3. А третья ступень где? Для чего транзистор 4H11G?
в обеих версиях плат охлаждение организовано неправильно …
эти корпуса транзисторов расчитаны на отвод тепла на плату а не на радиатор сверху …
даже медные полоски для отвода тепла с платы это полумера …
нужно использовать мосфеты с отводом тепла на венешний теплоотвод например такие www.infineon.com/dgdl/irf7748l1pbf.pdf?fileId=5546…
По стабилизатору - вижу 78М12 и за ней 1117-3,3. А третья ступень где? Для чего транзистор 4H11G?
этот транзистор как раз и есть первая ступень … 78Мхх по входу максимум 35 вольт а вам нужно 50 …
нужно использовать мосфеты с отводом тепла на венешний теплоотвод например такие
Насколько понимаю, альтернативные прошивки чувствительны к скоростям переключения ключей. Там все тайминги рассчитаны под конкретные транзисторы и смена транзисторов может повлечь расколбас… Или проще подобрать тайминг для новой пары транзисторов?
Я не очень хорошо знаю 8051 контроллеры. Писал пару раз в юности для АОНов, да и всё. А в реге стоит силабс 8051.
И ещё вопрос. Померил кв своего мотора, вышло 130 по кв-метру. И 30 полюсов.
из описания на TURNIGY K-Force 120A-HV OPTO V2 следует, что он тянет 2 Pole: 210,000 rpm или в моём случае 210/15 = 14000 rpm. То есть до нужных мне 6000 он мотор раскрутить может, я прав?
Там все тайминги рассчитаны под конкретные транзисторы и смена транзисторов может повлечь расколбас… Или проще подобрать тайминг для новой пары транзисторов?
от скорости работы транзисторов зависят ПОТЕРИ … чем быстрее они открываются/закрываются тем меньше они находятся в пограничном состоянии , когда ток уже есть а сопротивление еще велико … да , с увеличением частоты переключения (оборотов) эти потери растут , ибо они происходят КАЖДОЕ переключение , но думаю что не это является сдерживающим фактором .
можно не охлаждать мосфеты а пойти по другому пути , поставить много мелких мосфетов в параллель , высокоскоростных и с малым сопротивлением перехода , тогда они даже на этих токах почти не будут греться …
тайминги подбираются не под ключи а под мотор/пропеллер , грубо говоря это задержки между переходом эдс свободной фазы через ноль и очередным переключением фазы … многое зависит еще и от измерительной цепи , которая определяет этот переход … когда только появились альтернативные прошивки , в некоторых регуляторах при перепрошивке приходилось из этих цепей выпаивать конденсаторы , без этого они просто не работали …
думаю ограничение по оборотам связано с быстродействием микроконтроллеров , те насколько быстро он может управлять ключами с необходимой точностью …
альтернативные прошивки компилируются под разные контроллеры в основном потому что ключи в них сидят на разных ногах процессоров …
8051 похож очень на AVR , но AVR на порядок удобнее под АСМом так как у него нет жестких ограничений по адресации и использованию регистров … но 51 силабсы работают на существенно большей частоте , поэтому они победили …
еще лучше использовать ARM но нужно искать открытые исходники …
связано с быстродействием микроконтроллеров
С несущей ШИМ
Максимальная теоретически возможная частота вращения вала двигателя будет:
V=(Q/6/(N/2)*60);
Q – частота ШИМ в герцах
6 – количество коммутаций за один электрический оборот
N – количество магнитов
60 – количество секунд в минутеДвигатель с 14 магнитами:
V=((8000/6/(14/2))*60) = 11428 об/мин.Двигатель с 28 магнитами:
V=((8000/6/(28/2))*60) = 5714 об/мин.Т.е. если вам нужно управлять многополюсным двигателем на высоких оборотах, придется использовать регулятор с более высокой частотой ШИМ.
насколько мне известно , в этих регуляторах (во всяком случае тех что были на AVR) ШИМ был программный , соответственно его максимальная частота зависела от скорости микропроцессора … более поздний код я не смотрел …
если научились использовать аппаратный или использовать драйвер мосфетов с дополнительным входом для ШИМ то это сильно облегчило жизнь процу …
Погуглил и вот что вышло. У транзисторов с металлическим корпусом на корпусе часто бывает сток, а значит всё равно придётся что-то изолирующее прокладывать между корпусом и радиатором, это ухудшит охлаждение.
Можно сделать блок транзисторов на алюминиевой плате, но это обычно 1 слой и проблемы с разводкой…
чем быстрее они открываются/закрываются тем меньше они находятся в пограничном состоянии , когда ток уже есть а сопротивление еще велико
Если вы о плато Миллера, то драйвер имеет отвод для контроля его состояния.
А после перепрошивки на бихели регуляторы сохраняют возможность настраиваться штатными картами или с ПК/ПДУ? Или там становится жёстко зашитый конфиг?
Просто посчитал сейчас поформуле из поста ssilk, получилось ((12000/6/(30/2))*60) = 8000 rpm максимум сможет дать этот рег на моём моторе.
Гуляют слухи что он может ШИМ и 24 кГц, но подтверждения этому не найдено. В доке 12 кГц макс.
от скорости работы транзисторов зависят ПОТЕРИ … чем быстрее они открываются/закрываются тем меньше они находятся в пограничном состоянии , когда ток уже есть а сопротивление еще велико … да , с увеличением частоты переключения (оборотов) эти потери растут , ибо они происходят КАЖДОЕ переключение , но думаю что не это является сдерживающим фактором .
Не, я имел ввиду другое. Насколько понимаю, альтернативные прошивки потому и обеспечивают лучшую реакцию, что там просто посчитана задержка между подачей сигнала и фактическим включением фазы и это учитывается в коррекции тайминга и скорости нарастания оборотов. И якобы поэтому под каждый рег прошивка своя и только своя. Даже от типа транзисторов зависит - под реги с разными транзисторами разные прошивки.
Так в интернетах пишут 😃
Даже от типа транзисторов зависит - под реги с разными транзисторами разные прошивки.
даже если взять 24 килогерца , то один период ШИМ будет 42 миллисекунды …
возьмем тот транзистор что я предложил (кстати далеко не самый быстрый, до 30 вольт можно найти гораздо шустрее) и посчитаем …
Turn-On Delay Time 19 nc - задержка включения
Rise Time 104 nc - время нарастания (открытия ) , определяет потери при переключении в открытое состояние
Turn-Off Delay Time - 54 nc - задержка выключения
Fall Time - 77 nc - время спада (закрытия), определяет потери при переключении в закрытое состояние …
даже если это все просуммировать (а это полная двойная задержка) то получим 254 наносекунды , что составляет 0,6 % от периода шима 24 кгц …
под регули с разными транзисторами разные прошивки потому что платы разные , и транзисторы могут быть подключены к разным ногам …
ну да, соглашусь.
Блин, сейчас посмотрел ещё схемотехнику этого чуда… Вместо трёх слабых драйверов и сопли питания встаёт DRV8302 и т.п. Сразу в одном корпусе и сенсорика, и питальник.
Остаётся только один МК на оригинальной плате, если её переработать. Но стоит ли тогда оставаться на силабсе?..
Писать с нуля под STM не хочется - там сложно быстро дёргать ногами (хотя и можно). Какой-нибудь АВР32 - мёртвый путь…
Сейчас ещё обсудили с коллегой, пришли к выводу что алюминиевая плата не вариант. Провода силовые толстые и их надо к плате крепить. просто напаять к площадке как китайцы - не дело. Нужно продевать через дырку, а лучше через две, сгибая провод в П-образную скобу.
С алюминием так не получится.
С другой стороны, у этих транзисторов 1.7 мОм, тогда как у оригинальных 7.65 мОм (или 5.3 мОм для вишей). В 4.5 раза меньше тепловыделение, так может и сдует просто с крышек? 😃 Регулятор будет стоять на моторе, в потоке воздуха. Количество транзисторов оставить то же.
На край, прижмём плату к пластине алюминиевой или плоскому радиатору через теплопроводящий скотч. Что скажете?
ну варианта два … или ставить с мосфеты теплоотводами наружу и лепить радиатор сверху через номакон или ему подобный термоинтерфейс или паять на плату штыревые разЪёмы поверхностного монтажа со стороны мосфетов и на них одевать плату с драйверами/процом … тогда обратная сторона платы останется без элементов и не неё можно будет прикрепить радиатор через тот же номакон …
в качестве драйверов прекрасно справляются IR2101 и тому подобные … и под них вполне можно заточить стандартные прошивки …
у 8302 есть свои приимущества … можно подать сигнал ШИМ с аппаратного генератора МК , достаточно большой частоты , и его скважностью управлять подводимой к мотору энергией … а входы HIN/LIN использовать только для переключения фаз … это сильно разгрузит процессор …
Здается мне, мощных коптерных регулей не делают из соображений безопасности. Слишком уж у них большие перепады газа при работе, что может вызывать опасные токовые перегрузки. Хотя и это скорее дело реализации.
Появилась необходимость сделать кастомный мощный регулятор на знакомой прошивке. Выбор как всегда в последнее время пал на BlHeli_S. Вот что вышло:
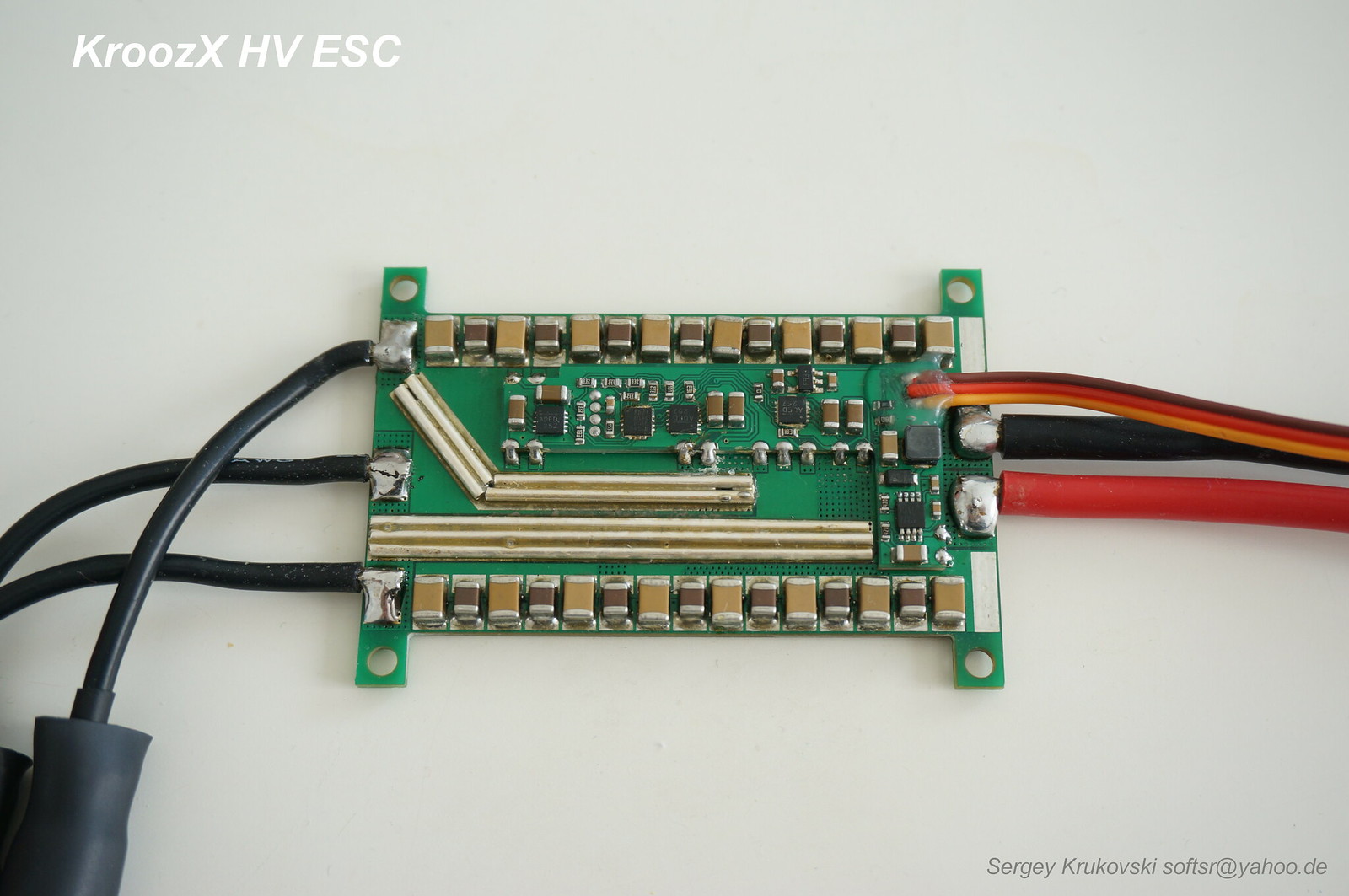
48МГц BB2 чип, MP1907 драйверы, 100V импульсный преобразователь питания, счетверенные TDSON мосфеты.
Ну и простенький тест:
Должен сказать, что с аутраннерами BlHeli_S работает получше, чем этим мощным инраннером. Нужно расширять диапазон настроек, что в общем то и позволяет кастомная прошивка.
мощных коптерных регулей не делают из соображений безопасности
Почему же не делают?
T-Motor Alpha 180A HV FOC 6-14S Brushless ESC - мало?
Даже не сайте тмотора самый мощный регулятор этой серии рассчитан на 80А:
store-en.tmotor.com/category.php?id=59
Где вы нашли на 180А не совсем понятно.
Где вы нашли на 180А не совсем понятно.
А вы погуглите.
А то что на сайте тмотора чего то нет - я не в первый раз вижу. Пару лет назад там не было моих S40A, хотя в руках они у меня были.
Вот что вышло:
ИМХО зря заменили электролиты на керамику. С этими диэлектриками у кондёров сильный микрофонный (или пьезо) эффект. В условиях вибрации шуметь могут сильнее чем без них.