Квадрокоптер DJI Phantom RFT первой версии

А за что удалили мой вопрос?
наверно потому, что он не имеет отношения к обсуждаемой теме - Новинка, квадрокоптер DJI Phantom RFT.
Интересует вопрос между 3 блэк идишин и 3+ блэк едишин.
Берите 3+
наверно потому, что он не имеет отношения к обсуждаемой теме
извиняюсь, не подумал.
Интересно, какая будет возня с батареей, если будет провод с диодом на крышке болтаться, а там еще usb на плате? Во втором корпусе диод переносится на другую сторону. Я на ебее заказал обычную крышку.
Определенная возня точно будет. Но приходится выбирать между возней с проводами, но светодиодом сзади и отсутствие возни с проводами и светодиодом спереди. Я пришел к выводу, что спереди светодиод не нужен, т.к. толку от него нет.
У меня пищалка с мигалкой на крышке будет.
Интересует вопрос между 3 блэк идишин и 3+ блэк едишин.
пользую плюсовую версию, разница с просто 3-й резкозть картинки, лучший баланс белого. (раньше была 3black)
итак новый день приносит новые проблемы, откалибровался дома показало что все ок, во дворе взлетел повисел пару минут все ок, поехал в поле приезжаю опять мигает красный / желтый, запустил advanced calibration после калибровки вроде ок, но если изменить курс снова мигает красный/желтый повернуть обратно мигает зеленым. переподключил питание часто замигало красным, вообще зашибись 😃 заново перекалибровал вроде стало норм. взлетел в 3-х метрах от меня висит как вкопаный отодвигаю его дальше начинается жуткий дрифт по ветру и изменение высоты (оба тумблера отсебя) снова эта трабла на одном курсе мигает зеленым на другом мигает красный/желтый переодически уходя в чсастое мигание красным
как считаете замена датчика что висит на ноге поможет решить эту проблему?
…Интересует вопрос между 3 блэк идишин и 3+ блэк едишин…
Вот здесь обсуждают.
Вот таблица для сравнения.
И ещё.
Я так понял, что картинка поярче и меньше искажения при широком угле обзора. ВайФай быстрее.
Новые возможности GoPro HERO3+
Сорри за, видимо тупой вопрос. Но читая эту ветку на подобное не наталкивался.
Насмотревшись роликов о сопровождении фантомом катеров в море, решили сегодня с товарищем попробовать то же самое с автомобиля. Ну в смысле отправить фантика в полет а самим сзади ехать.
Так вот , ровно через 30 секунд подобного полета, фантик завис на месте над трассой. Хоумлок был выключен GPS включен, по этому коптер просто висел на месте… Секунд через 10 вернулось управление, но не все.
Спуск, подъем, задних ход, поворот. Вперед никак. И так было до перезапуска всей системы.
Первый раз подумали что какая то помеха. Ну или звезды так сложились. Уехали в другое место, попробовали еще раз. То же самое.
Я примерно понимаю физику явления. Это скорее всего из за “защиты от помех” ( она включена ) Но хотелось бы уточнить, кто нибудь с этим сталкивался ? Что нужно выключать, что включать ? И что в реальности происходит ?
Еще раз сорри. Просто фантомчик у меня всего дней 10. Не хочется в слепую тыкаться. (фантом первый p330d, прошивка последняя с ассистента 2.20 )
Имею два коптера. Один - Фантом-1 в корпусе второго с minnazaosd, а второй - на раме Алексея с iOSDMini.
Небо и земля, причем не в пользу DJI. Не навязывая своего мнения, попробуйте сами.
Очень интересно!
Как раз собрался заказывать «iOSD mini» на Фантом1.
Но, прочитав Ваше сообщение, притормозил.
Расскажите подробнее о Ваших впечатлениях о «minnazaosd».
Какие Вы увидели преимущества «minnazaosd» в сравнении с «iOSD mini»:
Какая выводится информация, сложность установки, настройки, вес устройства и пр.
To Ale_xx
У Назы есть функция ограничения полета по дальности. Ставится в ассистенте.
Может, в этом дело?
Это скорее всего из за “защиты от помех” ( она включена )
Первый раз слышу про какую то защиту, или вы что придумываете или мысли свои неправильно излагаете.
И что в реальности происходит ?
Трудно сказать, что именно происходит у Вас, но очень похоже на срабатывание защиты от улетания, то-есть в ассистенте выставлен порог-ограничение дальности. Когда коптер долетает до виртуальной границы, он действительно как бы упирается в невидимую стену.
начал методом тыка выискивать проблему, пришлось выпилить дырочку в карбоне, оказывается карбон влияет на прохождение магнитных волн!

оказывается карбон влияет на прохождение магнитных волн!
Не поверите, он еще и электричество проводит.
Не поверите, он еще и электричество проводит.
так не первый день летаю с этими ногами а проблема вылезла только сейчас
У Назы есть функция ограничения полета по дальности. Ставится в ассистенте
Может, в этом дело?
Мы за 30 секунд успели проехать метров 100 максимум. Второй раз в поле и того меньше. Фантик впереди машины летел метров 10-15.( если по диагонали смотреть )
Когда просто с земли , полет гораздо дальше и без проблем.
я 30 секунд по видео уже смотрел( по таймингу происходящего ) . Оба раза одинаковое время. Именно такое заявлено в защите. Но так или иначе , был ветерок , я в люке “торчал” подруливал. Так что стики не были в одном и том же положении. Вот и не понимаю, что на самом деле происходит. И почему не включается передний ход до перезапуска.
Все-таки посмотрите, стоят ли ограничения по удалению и высоте
Первый раз слышу про какую то защиту, или вы что придумываете или мысли свои неправильно излагаете.
С Соседнего Сайта.
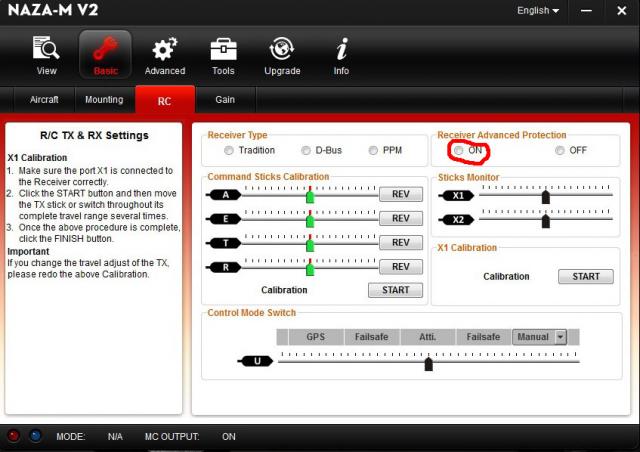
Только надо учитывать следующий момент данной настройки - режима защиты приемника.
Вот что написано по этому поводу в “Ассистенте” (перевод гугла, так что сильно не пинайте):
Если вы включите режим защиты приемника от помех, FailSafe будет срабатывать при возникновении следующих ситуаций во время полета. В соответствии с разницей высоты самолета, есть две ситуации.
- Ниже, чем 100 м, A / E / R канал не находится в нейтральном положении.
- Выше, чем в 100 метрах, A / E / R канал не в нейтральном положении или ручка газа находится выше нейтральной позиции.
В GPS или Atti Режиме полета, если требование 1 или 2 выполняется, и выходные данные каналов A / E / R / T не изменились в течение 20 секунд, то коптер будет парить автоматически. После этого, если выходные данные каналов A / E / R / T до сих пор не трогали стики в течение 10 секунд, система автопилота будет думать, что данные из приемника является ненормальными, а затем войдет в режим защиты от отказов FailSafe.
Мне скорее интересно, как это выключить, что включить ? Ведь летают же люди над морем за катерами управляя с самого катера.
Мы за 30 секунд успели проехать метров 100 максимум.
Хотите сказать, что машина ехала со скоростью три метра в секунду, самим то не смешно. С таким же успехом, вы могли просто идти за Фантомом, легким прогулочным шагом. 😃
Фантик впереди машины летел метров 10-15.( если по диагонали смотреть )
Все правильно, виртуальная граница отсчитывается не от пульта, а от места взлета, так что вы наверняка больше ста метров проехали.
Все-таки посмотрите, стоят ли ограничения по удалению и высоте
2000 метров, по умолчанию.
Странно все как то.
Хотите сказать, что машина ехала со скоростью три метра в секунду, самим то не смешно.
Ну не 2 километра мы проехали, это точно.
100 метров это не дальность, а высота описана в срабатывании зашиты.
Все правильно, виртуальная граница отсчитывается не от пульта, а от места взлета, так что вы наверняка больше ста метров проехали.
Это понятно. Но виртуальная граница ограничена 2 мя километрами.
А эти 100 метров , указанные в описании функции, это если вообще ничего с пульта не меняется. (К примеру стики вперед+вверх и не дышать.)
Как я понял, защита пульта, это если какой то сигнал стабильно поступает не изменяясь в течении 20 секунд , Наза считает что управление перехвачено какой то помехой какого нибудь иного источника. И возвращает коптер.
Наверное я все таки что то не понимаю (( Хотя понимаю, что туплю я, а не машинка.
Мне скорее интересно, как это выключить, что включить ? Ведь летают же люди над морем за катерами управляя с самого катера.
Если коптер не отлетал от точки взлета дальше двух километров и был постоянно в зоне действия пульта, то ни защита от потери сигнала, ни виртуальное ограничение, тут ни при чем, и отключать или включать их бесполезно, надо искать другие варианты.
Наверное я все таки что то не понимаю (( Хотя понимаю, что туплю я, а не машинка.
Попробуйте поставить ограничение дальности другое, например 1000 метров. И взлетайте не в ГПС режиме, а в АТТИ. Ну и откалибруйте аппарат перед взлетом.