Скорая помощь при краше/улете. Анализируем логи на airdata.com

Ласточки достают(((
Причем, чаще всего над водоемами.
Приходится спускаться на высоту метров 10 чтобы отстали(((
вообще народ говорит что типа с яркой раскраской вроде не нападали -возможно случайно а может и нет. говорит что голуби боятся
Ласточки достают
те хоть мелкие -а чайки как курица здоровая и дурная и агрессивная
Всем привет. Зарегистрировался, что бы написать это сообщение.
Суть проблемы в следующем: я летал над городом, все проходило штатно до момента посадки. Я подлетел к месту посадки и решил поснимать вокруг на остатках батареи. Было около 30%. Расстояние от пульта до коптера 26 метров (последняя запись в логе, после нее ничего). Внезапно экран смартфона стал серым, картинка застыла, как при отключении коптера. DJIGO (зеленая) 4.1.22 (с FCC) показывала ошибку “сигнал потерян” и слева были активны две кнопки “ВЗЛЕТ” и “значок пульта”. Я перезапустил джигу 2 раза (телефон был в режиме “самолет”, все другие приложения закрыты), ничего не изменилось- ошибка и серый застывший экран. При этом коптер полностью слушался стиков, но кнопка домой не работала. Т.к. расстояние было минимальным, я визуально подвел его к себе, опустил на высоту 0.5 метра и приготовился схватить его снизу, если не найду способ посадить. Затем, просто зажал левый стик вниз, и мавик штатно сел и отключил винты. Я выключил питание мавика, выключил пульт. Подождал около минуты, включил мавик и пульт. DJIGO 4.1.22 снова показал ошибку “сигнал потерян”. Закрыл 4.1.22, открыл 4.2.21 (крайнюю на тот момент из маркета) и тоже самое “signal lost”. Все выключил, поехал домой, дома все работало, как и прежде. В логах последняя запись перешел из режима спорт в P-GPS, расстояние 26 метров, и после этого ничего вообще.
Что это могло быть? Как бороться, если ситуация повторится? Что будет делать мавик в воздухе, если я буду перезагружать пульт и смарт в полете?
PS: взлетал и садился с крыши дома. Ошибок не было ни одной, кроме скорости ветра на большой высоте
Как бороться, если ситуация повторится?
Зависания приложения могут быть вызваны разными причинами. В первую очередь надо сделать ревизию кабелю, смартфону, обращая внимание на доступность оперативной памяти, темп. процессора и прочим программно-аппаратным вещам.
Обычно, после перезагрузки пульта, тушки и приложения все начинает работать, как и в вашем случае.
На расстоянии 26 метров, проблем с посадкой никаких нет, никто на экран для этого не смотрит 😃
А в воздухе работает команда возврат домой, проблем, тоже нет.
Я под полеты купил смарт с 6Гб памяти, теперь никаких вылетов ПО, не наблюдаю 😃
Согласен на счет кабеля. У меня за год с небольшим раздраконился разъем micro-USB боковой на пульте, теперь даже новый кабель не помогает, перешел на нижний разъем. А поведение было похожее - как при отключении коптера, пульта он при этом слушается.
Всем привет!
Появился в моей “коллекции” эйр. В первый же полет он решил потрепать мне нервы. Получилось:)
Долетел я на 2.5 км, развернулся на 180 градусов, отпустил стики, а он сам летит вбок, выскочило предупреждение “Strong Aircraft Interference”, попытался направить аппарат в сторону дома, и тут его начало крутить, посыпались ошибки esc, компаса и много всего другого. Я уже мысленно попрощался с коптером.
Нажал возврат домой, коптер еще немного покрутило и он полетел в мою сторону, подвес смотрел под 45 градусов к горизонту. Пролетел метров 300 решил взять управление в свои руки, коптер летел вбок вместо того, чтобы лететь вперед! Чтобы лететь в нужном направлении пришлось повернуть нос на 60-70 градусов вправо.
В 800 метрах от точки взлета решил попробовать включить go home и посмотреть так же боком будет лететь или нет, и он полетел прямо.
В холодном поту посадил его, но все-таки решил перезагрузить его и попробовать полетать еще раз, но уже недалеко.
Второй аккум отлетал без каких-либо глюков.
Вопрос - это что вообще было??? Я привык летать на прошках, полет всегда проходит штатно, никогда ничего похожего не наблюдал. А после такого в эйре появились сомнения.
Эйрдата: app.airdata.com/share/EVGDfU/GENERALOverview
Про скорость - это гонево, никаких 127 км\ч не было, даже спорт не включал, такую скорость показывал в момент когда его колбасило
upd. На форуме dji.com нагуглил, что Not Enough Force/ESC Error (с этого все началось) - это проблема 400 прошивки. Какая у меня версия не помню, вечером гляну. Но что-то мне подсказывает, что именно она:)
Да странный просто Эир какой-то
Я недавно в одном месте полетать решил
Он запросил калибровку компаса.
Не смог откалиброваться сразу. Только с 3-4 попытки.
Полетал. Сел, заменил аккумулятор, включаю - опять калибровку просит…
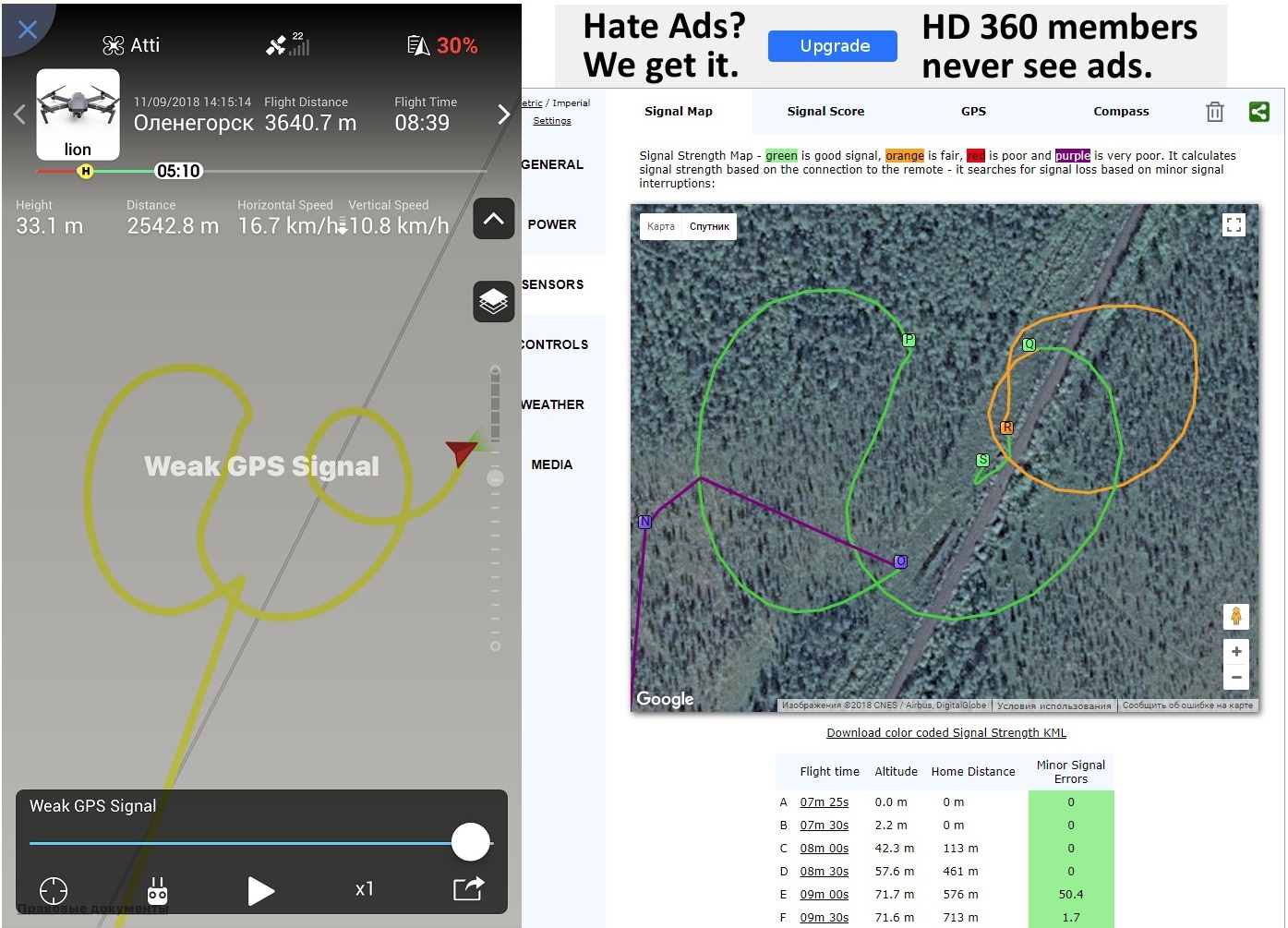
Полетал тут за мотопарапланеристом и в это время, когда мой standart был надо мной - часто терялась связь, вплоть до возврата домой. Так часто происходило и ранее, но просто поворачивал антенну с усилителем вверх и нормально. Так как с парапланеристом еще не раз полечу, то задумался над более стабильным сигналом, когда дрон надо мной (все же риск летать рядом с ним есть). Посему понял, что я всегда летаю с усилителем (пластик с куском фольги за 3$), а на дальность без него ниразу не проверял. Точно знаю, что может в даль он и увеличивает сигнал, но когда коптер высоко над пультом, то эффект обратный, так как сигнал, видимо экранируется и вверх не идет. Проверял с усилителем дальность и улетел на 1,5 км и пошла серьезная задержка по видео и решил вернуться, но мог явно лететь и дальше. Пошел в тоже самое чистое поле и полетел без усилителя, просто со стоковой антенной стандарта. Легко можно сказать взял 2км, однако, на обратном пути, впервые словил настоящий compass error и сразу забыл что нужно делать и все такое. Коптер висел, ни а что не реагировал и как-то “плававал”, судя по изображению и я почти пошел хотя бы к месту возможного падения, но вдруг ошибка пропала и я вернулся без проблем. До этого случая, логи и не смотрел ниразу, а сейчас смотрю и конечно, ничего не понимаю app.airdata.com/flight/…/SENSORS с чего бы в чистом поле взялась ошибка компаса. Никакого очевидного металла на пути не было. До этого, ошибки компаса были всегда по очевидным причиным (таким, как рядом с автомобилем). В остальное время всегда все хорошо.
Помогите определить gps координаты если это возможно из файлов размещенных в videoCache от dji go 4
Для каждого ролика есть набор файлов
2018_09_11_14_51_30.infoV2
2018_09_11_14_51_30.mapV2
2018_09_11_14_51_30.mp4
2018_09_11_14_51_30.rec
2018_09_11_14_51_30.thumbnail
Последние координаты из логов просмотренных при помощи airdata.com на высоте 20 метров, также есть видео из кеша, но зона падения большая при такой высоте, а вокруг болота и лес.
При поиске получилось активировать запись.
Можно из кешевских файлов вытащить координаты?
При поиске получилось активировать запись.
Можно из кешевских файлов вытащить координаты?
Хм, а зачем логи мучать? Если есть связь с дроном (активация записи), то с большой вероятностью, местоположения дрона отражалось на карте Приложения.
Другой вариант, задействовать опцию, ПОИСК ДРОНА. Там две точки, ваша и дрона. Идете с пультом, смотрите на экран…находите дрон.😃
После отключения аккума, имеет смысл посмотреть журнал полета. Там (тоже) координаты отображаются.
Хм, а зачем логи мучать? Если есть связь с дроном (активация записи), то с большой вероятностью, местоположения дрона отражалось на карте Приложения.
на данном месте дрона не было, немного растерялся при поиске ползая по болоту)
Другой вариант, задействовать опцию, ПОИСК ДРОНА. Там две точки, ваша и дрона. Идете с пультом, смотрите на экран…находите дрон.
таже самая точка, дрона нет в радиусе 20 метров.
После отключения аккума, имеет смысл посмотреть журнал полета. Там (тоже) координаты отображаются.
через dji go 4 в журнале показывает один конечный пункт, такойже как и при поиске, а через airdata.com удлиненный маршрут который заканчивается на высоте 20 метров, видео из кеша подтверждает эту точку.
по этому хотел вытащить данные из кеша.
формат файла .mapV2 не понятен, есть зависимость, но не могу разобраться.
формат файла .mapV2 не понятен, есть зависимость, но не могу разобраться.
Выложите его на файлобменник, вместе посмотрим.
=============
То, что вы пишете, крайне странно. Вся инфа в логи пишется из одного источника.
Если она есть в airdata, должна быть и в журнале полета и на карте.
Если вы уверены, что инфа в airdata более корректная, то и берите оттуда координаты. Подсказать, как именно?
Выложите его на файлобменник, вместе посмотрим.
То, что вы пишете, крайне странно. Вся инфа в логи пишется из одного источника.
Если она есть в airdata, должна быть и в журнале полета и на карте.
скрин прикрепил
Если вы уверены, что инфа в airdata более корректная, то и берите оттуда координаты. Подсказать, как именно?
В airdata маршрут также не закончен, на высоте 20 метров он не мог закончится ) да и по видео видно, но оно закачивается на этой высоте.
подскажите, я смотрел в airdata где указана начальная и конечная точка маршрута.
Изначально проблема началась с ошибки компаса, пропадание gps и хорошего ветра, с ним я справился подняв выше квадрик.
Но перед этим обновил ПО на квадрике. (
подскажите, я смотрел в airdata где указана начальная и конечная точка маршрута.
Хм, а что сразу не даете ссылку на airdata?
Как это делать…знаете…нет?
====
Файлы посмотрел, они бинарные, т.е. нечитаемые. Проще анализировать файл *.txt Тот который грузится на airdata/
А вообще, когда возникает ошибка компаса, надо было сразу коптер сажать, подтягивая его к себе на минимальной высоте.
Хм, а что сразу не даете ссылку на airdata?
Файлы посмотрел, они бинарные, т.е. нечитаемые. Проще анализировать файл *.txt Тот который грузится на airdata/
да, бинарники зависимость расположения данных видна, но как разобрать пока не понял.
А вообще, когда возникает ошибка компаса, надо было сразу коптер сажать, подтягивая его к себе на минимальной высоте.
не было возможность, ветер сильно колбасил подвес хотя экран был, сажать на дорогу не решился, движуха, вокруг болота, хотя лучше сразу посадил, но уж поздно.
не было возможность,
Да ладно выдумывать.😃
Там же на логе все видно. Как только взлетели, так сразу (мгновенно) посыпались ошибки компаса. Дрон довольно долго висел над головой…пока его не стало сносить ветром. Да и ветер 5м/с - ниачем.
Координаты хорошо видны, если скачать файлы CSV или GPX
Последняя координата: 68.1967814524318,33.3218952136365,178.6404114,
Да ладно выдумывать
ваше право, дрон полетел сразу на дерево, я успел только приподнять и то зацепил макушки, ширина обочины не как у вас в средней полосе.
Дрон довольно долго висел над головой
да, движуха пошла на трассе, сейчас много дискуссий можно разводить.
Да и ветер 5м/с - ниачем.
при 5 метрах камеру колбасить не будет.
Координаты хорошо видны, если скачать файлы CSV или GPX
об этом я знаю.
Последняя координата: 68.1967814524318,33.3218952136365,178.6404114
а теперь сравните перепад высот, по местности и высоту в конечной точки и она будет не на земле )
спасибо.
Здравствуйте. Вчера впервые ушатал дрон, Phantom 4 Pro, взлетал с высокой точки в облаке (достаточно высоко было), летел от себя и постепенно снижался. На момент потери сигнала высота составляла -18 метров, скорость 46 км/ч. Врезаться ни во что не мог, там впадина и каньон. Плюс, во время полёта контролировал пространство под собой, было очень высоко.
На расстоянии 100 метров, продолжал снижаться, как вдруг мгновенно пропал звук пропеллеров и прекратилась связь.
Врезаться он ни во что не мог, да и я бы услышал. Плюс, скорее всего, увидел бы изменения по камере из-за удара.
Подозреваю 3 причины:
- Замыкание из-за влажности в облаке. Маловероятно, ибо влажность не настолько высокая.
- потеря питания от батареи по какой-то причине.
Батарея была куплена отдельно от коптера, возможно, с ней проблемы были. Или замок батареи подвёл. - Так как я все время снижался (хоть и медленно), возможно, дрон просто заглушил двигатели по какой-то причине? Хотя, сонар по логам не показывал “землю” под собой (за которую могло сойти облако).
Летал в труднодоступной местности, над каньоном, в другой стране, с сильно ограниченным временем. Поэтому идти на место и разбираться не было возможности.
Возможно, кто-то сталкивался и у вас есть варианты?
Лог на Airdata: app.airdata.com/share/cNtZZQ
Хотя, он вряд ли что-то скажет, полет 56 секунд, ни одной ошибки
Поэтому идти на место и разбираться не было
Чего-то не понял. Вы коптер там оставили? Или все-таки нашли и забрали? )))
=====
Судя по ошибкам в логе, вполне могла случится ошибка датчиков.
Т.к. стик жмется вниз, а нижние видеокамеры фиксируют “поверхность”, то да, коптер глушит винты…он так устроен. 😦
Чего-то не понял. Вы коптер там оставили? Или все-таки нашли и забрали? )))
Оставил. Я на работе был, чужая страна, дрон упал в глубокий каньон. У меня минут 15 было времени, а чтобы его найти и побобрать часа 4 надо минимум.
Чего-то не понял. Вы коптер там оставили? Или все-таки нашли и забрали? )))
Судя по ошибкам в логе, вполне могла случится ошибка датчиков.
Т.к. стик жмется вниз, а нижние видеокамеры фиксируют “поверхность”, то да, коптер глушит винты…он так устроен. 😦
Если я не ошибаюсь, это так не работает. Во-первых, для того, чтобы двигатели заглушились таким образом, нужно чтобы высота по барометру не снижалась несколько секунд. Этого не произошло.
Во-вторых, как видно в логах Airdata, сонар показывал, что под ним ничего нет. В в-третьих, из тех же лого видно, что я нажал стик вниз всего не полсекунды.
В итоге, связь пропала на скорости 43 км/ч
Я померил расстояние трека КМЛ, получилось 260 метров. Это, по прямой.
На таком расстоянии, если коптер врезался в дерево, то звука не услышишь. Особенно в густом тумане.
260 метров вполне можно пройти за 15 мин. Впрочем, сейчас об этом уже поздно говорить. …