RYZE Tello микро квадрокоптер, совместное про-во с DJI и Intel

видел, но я тока не очень понял как это.
Сам иногда бываю поражён, подобным аттракционам китайской щедрости. Восток дело тонкое… 😃
листал утубчик и нашел такое:
хотя он и так мелкий и пропеллеры это не критично.
а вот это имхо интересно, слава богу оно имеет сабы на английском:
листал утубчик и нашел такое:
Всегда знал, что японцы знают толк в извращениях, подобные видосы нужно ограничивать по категории +18 😃
Всегда знал, что японцы знают толк в извращениях, подобные видосы нужно ограничивать по категории +18
мир большой и по любому кто то должен был такое сделать)) это было вопросом времени))
А что будет, если в дроидбоксе ввести команду на отлет, скажем на 200 метров- коптер полетит до потери сигнала со смартфона, или независимо от сигнала улетит на эти 200м?
скажем на 200 метров- коптер полетит до потери сигнала со смартфона, или независимо от сигнала улетит на эти 200м?
Для того, что бы проверить как поведёт себя коптер с выполняемой программой при потере сигнала с пульта, не надо летать на 200 метров, создайте любую программу, хоть на три метра полёта, запустите её и сразу же отрубите Wi-Fi на смартфоне, дальше смотрите чего будет делать тело, если выполнит программу, то значит и при потере сигнала, будет тоже самое.
С удовольствием посмотрел бы, но пока тела нет, только присматриваюсь к покупке 😃
Теория это прекрасно,но как говорили в Савковые времена забудте чему ВАС учили в институте.Проверять лучше на практике?
С удовольствием посмотрел бы
Мне тоже стало интересно, но как сейчас не пытался, но Tello коннектится с программой DroneBlocks сейчас на отрез отказывается, проверил и на iOS и на Андроид. С родной программой Tello летает без вопросов, сразу видится программой, коннектится и управляется. Кстати тогда уже вопрос к пользователям сабжа, проверьте пожалуйста на своих девайсах, будит ли коннект с программой DroneBlocks, недавно эта программа обновилась, причём на всех платформах, может это глюк какой то?
Полетная программа хранится со стороны смартфона и посылается команда за командой, когда дрон рапортует об успешном выполнении предыдущей. К тому же команды имеют лимиты на передаваемое значение (например 500см для движения вперед), на 200м Вы его не запустите никак. Гляньте SDK, там все очень примитивно.
товарищи это не открытие америки, но я как человек далекий от “блутус геймпадов на телефонах” настрадался и хочу этим поделиться 😃
мб пригодится
попробовал я на андроид несколько эмуляторов для тача:
- GameKeyboard
- GKM Touch
- Tincore Keymapper - отказался видеть мой геймпад
- Game Controller 2 Touch
А суть проблемы такая: поставил я GKM Touch, вроде работает, но какая большая “мертвая зона” и больно как то подозрительно работали стики. вроде как работали, а вроде как и не оч точно.
Подумал что геймпад так себе и страдал.
Потом как то решил таки потестить еще что то и неподумав взял GameKeyboard. и оно работало ровно так же.
Но чаше терпения такие переполнилась.
Взял я тестер и… он показал что на самом деле все оч даже работает и никакой “мертвой зоны” нету:

и что геймпад оч даже точно работает.
начал гуглить - нашел как уменьшить в андроиде мертвую зоу.
это делается с одной стороны просто, с другой не очень.
берем рут копалку идем в: System/usr/keylayout
в моем случае геймпад определялся как хбоксовский

что собсно моно увидеть в коментах внутри:
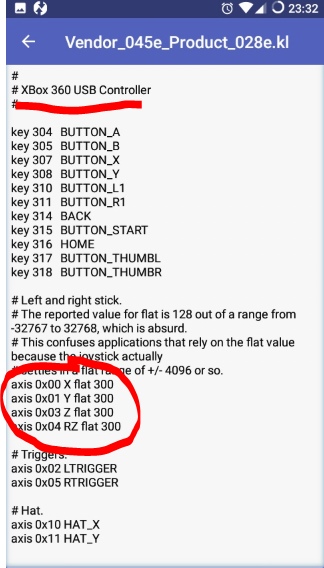
в нем нас интересует то, что обведено кружком.
писали что лучшие значение это что то в пределах 200-400 ( а стоит 4096 по умолчанию)
меняем, сохраняем, и запускаем GameKeyboard или GKM Touch что бы увидеть… что оно ни на что не повлияло.
почему? потому что они ховно.
я попробовал Tincore Keymapper - он отказался видеть мой геймпад.
и взял я Game Controller 2 Touch… и он таки заработал.
“про” версию не пробовал потому напишу про ту что затестил.
и интерфейс там просто бесчеловечный.
так оно выглядит и слава богу настраивая можно идти по кнопкам сверху вниз:

сперва нужно включить

а тут можно сделать активной (собсно это и есть включение эмулятора)
но желательно сделать это чуть позже.
потом идем в настройки

1 - сперва нужно привязать реальный геймпад к виртуальным кнопкам.
2 - потом желательно проверить (там будут галочки зеленые на тех кнопках которые таки забиндились)
3 - это и есть собсно карта расположения виртуальных стиков. для удобства моно снять скрин с приложения и поставить на задник.

и нужно обязательно сохранить профиль!
если вы не задали их в 1м пункте - то тут ничего выбрать будет нельзя.
4 - самая вкусная штука, возможность вообще выключить мертвую зону.
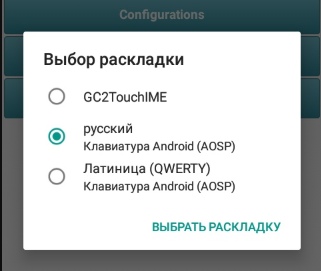
далее нужно убедиться что выбран именно тот профиль который мы сделали
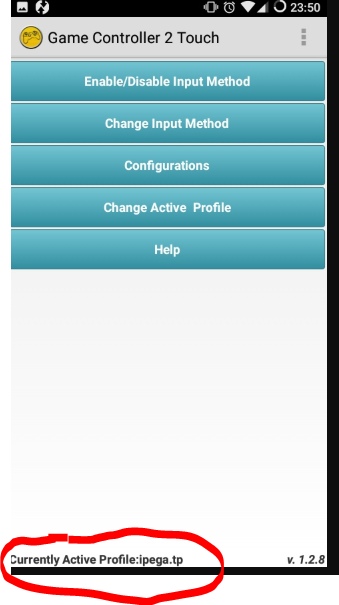
и можно в “Change Input Method” включать ввод с софтины и тестить =3
по идеии все должно двигаться оочень плавно и без мертвых зон.
из багов тока то что…первое нажатие на стики почему то немного багает, потому перед полетом лучше их таки дернуть вверх-вниз и все будет ок.
Какая частота мигания синего светодиода при нормальной зарядке ?
мануал вам в помощь! мигает синим при зарядке . как зарядился, мигает постоянно.
мануал вам в помощь!
Человек спросил не про то, что должен делать диод во время зарядки и после, а с какой частотой он должен мигать, это как бы разные вещи.
Какая частота мигания синего светодиода при нормальной зарядке ?
Примерно раз в секунду.
летал сегодня и заметил такое, прям приятная неожиданность:

прям приятная неожиданность:
Прикольно, как то даже не обращал внимание на этот момент. Так думаю специально в режиме Fast сделали угол шире, что бы было легче лететь. Жаль только этот трюк работает в режиме Видео, поскольку в фото режиме ему можно было бы найти практическое применение, например вместить в кадр большой объект не отлетая далеко.
Не совсем понял в чем приятная неожиданность. Но если речь о разном угле, то причина думаю все таки в стабилизации картинки, которая работает в slow, и которой естественно нужны поля за счет которых можно стабилизировать картинку. В fast же стабилизация невозможна в силу гораздо больших углов наклона дрона.
Не совсем понял в чем приятная неожиданность.
я думал что речь идет только о именно стабилизации, а не переключении еще и разрешения прямо во время записи.
они вполне могли и не делать такого.
те оно в слоу по умолчанию шлет в завышеном разрешении (те делая к нему масштабирование), с запасом для переключения, тк как бы очевидно что оно различается.
если я правильно понял - это не оч хорошо.
к слову я смотрел тонну обзоров телло и не видел ни разу, что бы показали насколько именно оно режет.
к слову я смотрел тонну обзоров телло и не видел ни разу, что бы показали именно насколько оно режет.
Для видео режима, в принципе абсолютно не важно, сколько оно там режет, даже если в три раза резала, а на самом дел гораздо меньше, то и этого бы хватило, что бы захватывать картинку с разрешением 720P, а в фото режиме на сколько я понимаю стаб не работает.
я думал что речь идет только о именно стабилизации, а не переключении еще и разрешения прямо во время записи.
они вполне могли и не делать такого.
Получилось так, что этим переключением они сразу двух зайцев убили, и облегчили полёт на бОльшей скорости и ненужные вычисления убрали, на большой скорости всё равно стаб не справится. Только вот не понятно, почему в Фото режиме угол и не маленький и не большой, а что то среднее между Fast и Slow. Короче они похоже перемудрили с этими углами. 😃
Получилось так, что этим переключением они сразу двух зайцев убили, и облегчили полёт на бОльшей скорости и ненужные вычисления убрали, на большой скорости всё равно стаб не справится. Только вот не понятно, почему в Фото режиме угол и не маленький и не большой, а что то среднее между Fast и Slow. Короче они похоже перемудрили с этими углами.
корочи - беру свои слова назад. как бы оно не было сделано - это лучшая программная стабилизация что я видел.
пробовал в Adobe Premiere тыкать стабилизацию, получилось такое:
Бортовая стабилизация использует показания гироскопов, а не саму картинку. Принцип совершенно разный, результат соответственно тоже. Т.е. в телло, в slow, передаваемый кадр вырезается из большого кадра со смещением по гироскопу, что имитирует работу подвеса, и дает практически неподвижную картинку. Отличие в фото режиме, скорее всего обусловлено разной площадью задействованного участка матрицы.