RYZE Tello микро квадрокоптер, совместное про-во с DJI и Intel

товарищи это не открытие америки, но я как человек далекий от “блутус геймпадов на телефонах” настрадался и хочу этим поделиться 😃
мб пригодится
попробовал я на андроид несколько эмуляторов для тача:
- GameKeyboard
- GKM Touch
- Tincore Keymapper - отказался видеть мой геймпад
- Game Controller 2 Touch
А суть проблемы такая: поставил я GKM Touch, вроде работает, но какая большая “мертвая зона” и больно как то подозрительно работали стики. вроде как работали, а вроде как и не оч точно.
Подумал что геймпад так себе и страдал.
Потом как то решил таки потестить еще что то и неподумав взял GameKeyboard. и оно работало ровно так же.
Но чаше терпения такие переполнилась.
Взял я тестер и… он показал что на самом деле все оч даже работает и никакой “мертвой зоны” нету:

и что геймпад оч даже точно работает.
начал гуглить - нашел как уменьшить в андроиде мертвую зоу.
это делается с одной стороны просто, с другой не очень.
берем рут копалку идем в: System/usr/keylayout
в моем случае геймпад определялся как хбоксовский

что собсно моно увидеть в коментах внутри:
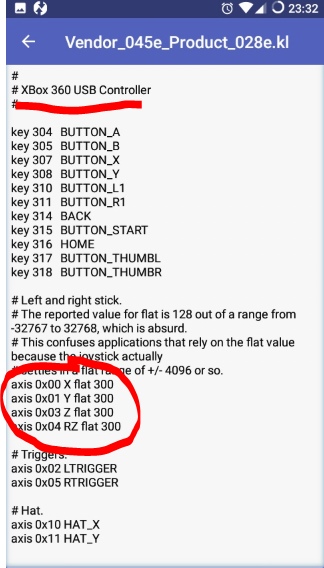
в нем нас интересует то, что обведено кружком.
писали что лучшие значение это что то в пределах 200-400 ( а стоит 4096 по умолчанию)
меняем, сохраняем, и запускаем GameKeyboard или GKM Touch что бы увидеть… что оно ни на что не повлияло.
почему? потому что они ховно.
я попробовал Tincore Keymapper - он отказался видеть мой геймпад.
и взял я Game Controller 2 Touch… и он таки заработал.
“про” версию не пробовал потому напишу про ту что затестил.
и интерфейс там просто бесчеловечный.
так оно выглядит и слава богу настраивая можно идти по кнопкам сверху вниз:

сперва нужно включить

а тут можно сделать активной (собсно это и есть включение эмулятора)
но желательно сделать это чуть позже.
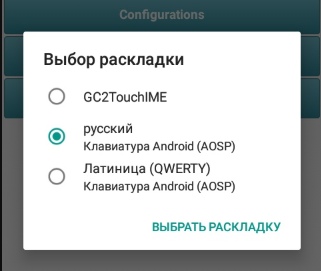
потом идем в настройки

1 - сперва нужно привязать реальный геймпад к виртуальным кнопкам.
2 - потом желательно проверить (там будут галочки зеленые на тех кнопках которые таки забиндились)
3 - это и есть собсно карта расположения виртуальных стиков. для удобства моно снять скрин с приложения и поставить на задник.

и нужно обязательно сохранить профиль!
если вы не задали их в 1м пункте - то тут ничего выбрать будет нельзя.
4 - самая вкусная штука, возможность вообще выключить мертвую зону.
далее нужно убедиться что выбран именно тот профиль который мы сделали
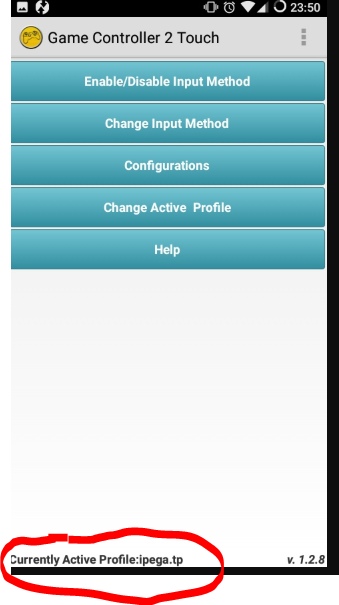
и можно в “Change Input Method” включать ввод с софтины и тестить =3
по идеии все должно двигаться оочень плавно и без мертвых зон.
из багов тока то что…первое нажатие на стики почему то немного багает, потому перед полетом лучше их таки дернуть вверх-вниз и все будет ок.
Какая частота мигания синего светодиода при нормальной зарядке ?
мануал вам в помощь! мигает синим при зарядке . как зарядился, мигает постоянно.
мануал вам в помощь!
Человек спросил не про то, что должен делать диод во время зарядки и после, а с какой частотой он должен мигать, это как бы разные вещи.
Какая частота мигания синего светодиода при нормальной зарядке ?
Примерно раз в секунду.
летал сегодня и заметил такое, прям приятная неожиданность:

прям приятная неожиданность:
Прикольно, как то даже не обращал внимание на этот момент. Так думаю специально в режиме Fast сделали угол шире, что бы было легче лететь. Жаль только этот трюк работает в режиме Видео, поскольку в фото режиме ему можно было бы найти практическое применение, например вместить в кадр большой объект не отлетая далеко.
Не совсем понял в чем приятная неожиданность. Но если речь о разном угле, то причина думаю все таки в стабилизации картинки, которая работает в slow, и которой естественно нужны поля за счет которых можно стабилизировать картинку. В fast же стабилизация невозможна в силу гораздо больших углов наклона дрона.
Не совсем понял в чем приятная неожиданность.
я думал что речь идет только о именно стабилизации, а не переключении еще и разрешения прямо во время записи.
они вполне могли и не делать такого.
те оно в слоу по умолчанию шлет в завышеном разрешении (те делая к нему масштабирование), с запасом для переключения, тк как бы очевидно что оно различается.
если я правильно понял - это не оч хорошо.
к слову я смотрел тонну обзоров телло и не видел ни разу, что бы показали насколько именно оно режет.
к слову я смотрел тонну обзоров телло и не видел ни разу, что бы показали именно насколько оно режет.
Для видео режима, в принципе абсолютно не важно, сколько оно там режет, даже если в три раза резала, а на самом дел гораздо меньше, то и этого бы хватило, что бы захватывать картинку с разрешением 720P, а в фото режиме на сколько я понимаю стаб не работает.
я думал что речь идет только о именно стабилизации, а не переключении еще и разрешения прямо во время записи.
они вполне могли и не делать такого.
Получилось так, что этим переключением они сразу двух зайцев убили, и облегчили полёт на бОльшей скорости и ненужные вычисления убрали, на большой скорости всё равно стаб не справится. Только вот не понятно, почему в Фото режиме угол и не маленький и не большой, а что то среднее между Fast и Slow. Короче они похоже перемудрили с этими углами. 😃
Получилось так, что этим переключением они сразу двух зайцев убили, и облегчили полёт на бОльшей скорости и ненужные вычисления убрали, на большой скорости всё равно стаб не справится. Только вот не понятно, почему в Фото режиме угол и не маленький и не большой, а что то среднее между Fast и Slow. Короче они похоже перемудрили с этими углами.
корочи - беру свои слова назад. как бы оно не было сделано - это лучшая программная стабилизация что я видел.
пробовал в Adobe Premiere тыкать стабилизацию, получилось такое:
Бортовая стабилизация использует показания гироскопов, а не саму картинку. Принцип совершенно разный, результат соответственно тоже. Т.е. в телло, в slow, передаваемый кадр вырезается из большого кадра со смещением по гироскопу, что имитирует работу подвеса, и дает практически неподвижную картинку. Отличие в фото режиме, скорее всего обусловлено разной площадью задействованного участка матрицы.
Бортовая стабилизация использует показания гироскопов, а не саму картинку.
это и ежу понятно и не это есть суть притензий. телло слишком много обрезает и имхо было бы лучше если бы оно показывало полную область вместе с черными краями. ну или хотя бы резалось не в 2 раза, никто не умрет если оно будет изредка в кадре мелькать.
такое кстати есть у кучи дронов и ничего, живут. например у XIRO Xplorer Mini.
к слову у них по сути одинаковое разрешение камеры. если я не путаю.
Мысль Вашу понял, хоть и с трудом. В теории да, угол мог быть и шире, с черными полосами сверху и снизу, т.к. стабилизации по yaw нет. Видимо они предпочли одинаковое соотношение сторон картинки в режимах slow и fast. Вопрос спорный, как оно лучше, меня например устраивает как есть.
А обрезает он ровно столько, насколько может наклоняться, в том или ином режиме. Т.е. если дрон наклонен вперед и влево одновременно, отображаемый кадр не должен упереться углом в исходный кадр. Чтобы сделать шире угол при сохранении всех функций этого стабилизатора придется еще уменьшить допустимые углы наклона, либо нужен больший исходный кадр - который потребует гораздо большей производительности матрицы и того чипа куда поступают данные с нее.
P.S. Если подключитесь к телло на iPad например, будут черные полосы сверху и снизу)
ну или хотя бы резалось не в 2 раза
От того, что оно режется в два раза, качество самой картинки не ухудшается, как я писал выше для 720Р и половины 5МР матрицы хватит с избытком, а если Вы переживаете за потерянную информацию по краям кадра, то здесь только остаётся подальше отлететь от объекта. Но честно говоря соглашусь с jkson, меня тоже устраивает как есть, качество видео у Tello и так то не айс, а если ещё и чёрные полосы будут болтаться по краям, вообще фигня полная.
и половины 5МР матрицы хватит с избытком
не поймите меня не правильно, но я думаю так и возможно вы меня поправите:
я думаю телло не использует для видео 5mp.
для видео он использует 960P(те чуть больше 1мп и его как раз и видно в режиме “fast”, только оно чуть обрезано)
тоесть это выкидывание каждой второй точки по горизонтали и вертикали и из 5mp получается ровно 960P(это оправдано тк проц там не айкор7 с водяным охлаждением и он в принципе не может в реальном времени работать с 2560х1920)
и из него и вырезает кусок гдето тянущий на 480р, который стабилизируется и масштабируется до 720р.
в таком случае качество совпадает с…
качество видео у Tello и так то не айс
но к слову я думаю он…банально не тянет больше.
в таком случае качество совпадает с…
Не вижу особого смысла гадать на кофейной гуще, в любом случае это всё предположение, в теме есть головастые ребята, которые уже давно до микрокода добрались, так что может они смогут внести конкретику основываясь на цифрах, а не догадках.
(это оправдано тк проц там не айкор7 с водяным охлаждением и он в принципе не может в реальном времени работать с 2560х1920)
В GOPro процессор тоже без водяного охлаждения, однако камера как то справляется с программным стабом.
Не вижу особого смысла гадать на кофейной гуще, в любом случае это всё предположение
я не вижу смысла потрошить код что бы лишний убедится в том что оно пишет именно в 480р, поскольку это и глазами видно.
но искренне надеюсь что головастые ребята придумают как увеличить видимую область.
В GOPro процессор тоже без водяного охлаждения, однако камера как то справляется с программным стабом.
только GOPro весит больше чем телло на порядки, и оно как бы на флешку пишет а не файфаем шлет 4к, но пример хороший.
только GOPro весит больше чем телло на порядки
Мы точно об одном же коптере говорим? 😃 Вес ГоуПро и Tello практически одинаковый, Tello даже на несколько грамм тяжелее.
и оно как бы на флешку пишет а не файфаем шлет 4к
Ну так Tello и не шлёт 4К, видео линк всего 720P. И лучше бы писала на борт, тогда видео режим был бы не просто для галочки.
я не вижу смысла потрошить код что бы лишний убедится в том что оно пишет именно в 480р, поскольку это и глазами видно.
После нескольких лет полётов на аналоговом линке, как раз с разрешением примерно 480Р, линк Tello вообще воспринимаются как Ultra HD. 😃 Просто поток максимальный всего 4Мбит, а с учётом нестабильного сигнала, этот поток даже и до этих значений не дотягивает, потому и может создаваться впечатление, что видео низкого разрешения.
Немного размышлений про программу Дронблокс. Там в обсуждениях народ расстраивается почему для мавиков/фантомов можно включать в программу полета фото/видео съемку, на телло нет. Так проблема в том , что Телло не пишет видео на себя, только передает видеопоток на телефон и тот уже пишет его.
На выходных полетал немного, понравилось что даже подняв его на высоту 20-30м, когда визуальная стабилизация уже не работает, он довольно прилично держит позицию, несмотря на ветер.
На выходных полетал немного, понравилось что даже подняв его на высоту 20-30м, когда визуальная стабилизация уже не работает, он довольно прилично держит позицию, несмотря на ветер.
Вы уверены, что Tello на такой высоте не может отследить позицию по нижней камере? Скорее всего всё таки может, поскольку у Tello больше нет никакой возможности удерживать свою позицию на ветру.
Возможно, просто периодически выскакивало предупреждение 😃 Если на такой высоте держит - это здорово, молодцы производители 😃
Я его пробовал использовать как дрон-разведчик 😃 Посмотреть что впереди за деревьями, куда дорога идет 😃
Но все полеты только с репититором, без него связи и на 30м плохая, а с репититором на 200м улетел.